用于确定操控信号的方法和设备
文献发布时间:2023-06-19 10:46:31
技术领域
本发明涉及一种用于对输入信号进行分类和确定尤其是用于操控(Ansteuern)执行器的操控信号的方法和设备、一种用于训练机器学习系统的方法、一种训练系统、一种计算机程序和一种机器可读取的存储介质。
背景技术
从没有提前公开的DE 10 201 721 0787.1中,已知了一种用于确定在通信网络中是否存在异常的方法,其中通过如下方式来分析至少一个经由通信网络传送的消息:根据所传送的消息、也就是说尤其是从所传送的消息中,确定编码器的输入变量,其中借助编码器来确定减小的维度的中间变量,并且其中根据中间变量借助解码器来确定具有输入变量的维度的输出变量,其中根据输入变量和输出变量来判定,是否存在异常。也可以用术语“自编码器(Autoencoder)”来称由编码器和解码器构成的这种组合,由编码器和解码器构成这种组合来使得,输入变量经由一个或者多个减小的维度的中间变量(也就是说与信息损失相联系地)被转化成输出变量。
从Diederik P Kingma、Max Welling的“Auto-Encoding Variational Bayes(arXiv preprint arXiv:1312.6114vl0,2014年)”中,已知了一种变分自编码器(Variational Autoencoder)。从Christian Rupprecht等人的“Learning in anUncertain World: Representing Ambiguity Through Multiple Hypotheses”(arXivpreprint arXiv:1612.00197v3,International Conference on Computer Vision(2017))和Eddy Ilg等人的“Uncertainty Estimates and Multi-Hypotheses Networksfor Optical Flow”(arXiv preprint arXiv:1802.07095v3,(2018))中,已知了卷积神经网络(CNN,Convolutional Neural Networks),所述卷积神经网络预测多个假设。
从Anders Boesen Lindbo Larsen、Søren Kaae Sønderby、Hugo Larochelle、OleWinther的“Autoencoding beyond pixels using a learned similarity metric”(arXivpreprint arXiv:1512.09300v2,2016年)和Alexey Dosovitskiy、Thomas Brox的“Generating Images with Perceptual Similarity Metrics based on Deep Networks”(arXiv preprint arXiv:1602.02644v2,2016年)中,已知了用于利用双人游戏来训练变分自编码器的方法。
发明内容
本发明的优点
相对于从现有技术中已知的内容,本发明的主题具有如下优点:异常识别拥有改进的外推能力,使得最终得到的操控方法对此更稳健,或者替选地利用少量训练数据实现可比较的稳健性。
本发明的公开
在第一方面,本发明因而涉及具有权利要求1的特征的方法。其他方面是并列权利要求的主题。有利的改进方案是从属权利要求的主题。
在第一方面,本发明因而涉及一种用于对输入信号进行分类的方法,所述输入信号尤其是根据传感器信号(那就是传感器的输出信号)来确定。在这种情况下,根据自编码器的输出信号,判定输入信号是否具有异常,所述输入信号被输送给所述自编码器,其中自编码器具有至少一个编码器和至少一个解码器,其中根据输入信号借助编码器来确定中间变量,并且根据所述中间变量借助解码器来确定输出信号,其中所述自编码器对于输送给所述自编码器的输入信号提供多个不同的假设,用于重构所述输入信号,并且根据多个不同的假设,所述自编码器确定所述输出信号。
这些假设在这种情况下优选地成对地是不同的,也就是说这些假设中没有两个假设是相同的。这优选地可以通过如下方式来确保:在自编码器的训练阶段中,损失函数被选择为使得,如果两个假设彼此太相似、尤其是相同,则所述损失函数进行处罚,在所述自编码器中,自编码器的参数变化,用于使可预先给定的损失函数最小化。
在改进方案中可以设置,自编码器包括多个解码器,其中这些解码器中的每个解码器都提供输出变量,其中根据这些解码器中的分别一个解码器的输出变量,提供多个不同的假设中的各一个假设。
对此,以特别简单的方式,利用例如上面所介绍的方案可以防止两个假设相同,例如其方式是:解码器在结构上不同地被选择,和/或这些解码器的参数不同地被初始化。当然可能的是,这些解码器部分是一致的。如果解码器例如通过人工神经网络来实施,则可以设置,第一层被所有解码器共享,并且这些解码器在该最后层或者所述最后层中才被区别。
优选地可以设置,(尤其是同样)根据这些假设的如下那个假设来选择输出信号:那个假设最接近输入信号。
在改进方案中可以设置,提供操控信号,所述操控信号与是否已识别出异常有关。操控信号尤其是可以设置用于操控执行器,优选地用于控制至少部分自动化的车辆。
在其他方面,设置了一种系统,所述系统设立为执行上面提到的方法之一。该系统由此也包括上面提到的自编码器。
在又一方面,因而设置了一种用于训练自编码器的方法。这借助鉴别器进行。给鉴别器要么输送尤其是从传感器信号中确定的输入信号,要么输送由自编码器生成的输出信号,其中训练所述鉴别器,以区分输送给所述鉴别器的信号是输入信号还是由自编码器生成的输出信号,并且其中训练所述自编码器,以生成所述输出信号,使得鉴别器不能这样区分输入信号和所生成的输出信号。也就是说,鉴别器和自编码器类似如下游戏地玩双人游戏:所述游戏在所谓的生成对抗网络(简称为:GAN(Generative Adversarial Networks))中被采用。
为了针对本自编码器可应用本身已知的双人游戏,因而建议,随机生成中间变量,并且借助解码器来确定输出信号,所述输出信号那么被输送给鉴别器,用于进行区分。
尤其是,中间变量可以从可固定地预先给定的概率分布中得出,其中根据据此确定的输出信号,仅鉴别器被训练。
也就是说,该输出信号代入(eingeht)损失函数的项中,使得根据损失函数的梯度直接仅改变表征鉴别器的参数。损失函数只在如下范围内代入其他参数的变化中:利用变化的参数来参数化的鉴别器具有经过改变的特性,所述经过改变的特性在训练方法的以后的迭代中可导致,自编码器的参数以经过改变的方式变化。
也可能的是,编码器根据输入信号来确定参数,所述参数表征中间变量在给定的输入信号的情况下的统计分布(尤其是正态分布),并且其中中间变量从该统计分布中得出。
为了确保异常识别将尽可能少的输入信号错误地标明为异常,可以设置,从多个由自编码器生成的假设中选出与所述输入信号最相似的那个假设,其中鉴别器仅仅对于根据所选出的最相似的假设来尝试判定,该假设是否已由自编码器生成,并且其中对表征鉴别器和/或自编码器的参数的适配与所尝试的判定的结果有关。
然而,这可能导致,与其余的所生成的假设关联的梯度消失,使得其余假设没有以期望的程度有助于改进所建议的自编码器的外推能力。为了抵抗该效应,可以建议,鉴别器对于每个根据中间变量由自编码器生成的假设都尝试判定,该假设是否已由自编码器生成,并且其中表征鉴别器和/或自编码器的参数的变化与所有这些所尝试的判定的结果有关。
附图说明
随后,在参照附上的附图的情况下,更详细地阐述了本发明的实施形式。在这些附图中:
图1示意性地示出了根据本发明的自编码器;
图2示意性地示出了本发明的实施形式的结构;
图3示意性地示出了用于控制至少部分自主的机器人的实施例;
图4示意性地示出了用于控制生产系统的实施例;
图5示意性地示出了用于控制个人助理的实施例;
图6示意性地示出了用于控制进入系统(Zugangssystems)的实施例;
图7示意性地示出了用于控制监控系统的实施例;
图8示意性地示出了用于控制医学成像系统的实施例;
图9示意性地示出了用于训练自编码器的训练系统;
图10示意性地示出了用于在训练系统中采用的自编码器;
图11示意性地示出了训练系统的评价单元的实施形式的结构;
图12以流程图示出了用于训练自编码器的方法的实施形式;
图13以流程图示出了用于训练自编码器的方法的部分的实施形式;
图14以流程图示出了用于训练自编码器的方法的部分的第二实施形式;
图15以流程图示出了用于训练自编码器的方法的部分的第三实施形式;
图16以流程图示出了用于训练自编码器的方法的部分的第四实施形式;
图17以流程图示出了用于运行控制系统的方法的实施方案。
具体实施方式
图1示出了执行器10,所述执行器10在该执行器10的环境20中与控制系统40交互。执行器10和环境20共同地也被称作执行器系统。优选地每隔一定时间间隔,利用传感器30来检测执行器系统的状态,所述状态也可以通过多个传感器来给出。向控制系统40传送传感器30的传感器信号S(或在多个传感器的情况下为各一个传感器信号S)。控制系统40因此接收到传感器信号S的序列。控制系统40从中确定操控信号A,向执行器10传输该操控信号A。
控制系统40在可选的接收单元50中接收到传感器30的传感器信号S的序列,所述接收单元50将传感器信号S的序列转换成输入信号x的序列,(替选地,各传感器信号S也可以直接作为输入信号x被接纳)。输入信号x例如可以是传感器信号S的片段或者继续处理。输入信号x例如可以包括图像数据或者图像,或者包括视频记录的各个帧。换言之,根据传感器信号S,确定输入信号x。输入信号x被输送给自编码器60,如该自编码器60示例性地在图2中所图示的那样。同样,输入信号x被输送给异常探测器80。
自编码器60优选地通过参数φ、θ来参数化,所述参数φ、θ寄存在参数存储器P中并且由所述参数存储器P来提供。
自编码器60从输入信号x中确定输出信号y。输出信号y被输送给异常探测器80。输出信号y是通过自编码器60对输入信号x的重构。异常探测器80从输入信号x和输出信号y中确定在输入信号x与输出信号y之间的相似程度。根据所确定的相似程度,异常探测器可以确定操控信号A,所述操控信号A被输送给执行器10,以便相对应地操控执行器10。例如,可以判定,执行器10是在正常模式中被操控,还是在安全模式中被操控。该方法的实施形式在图17中图示。
执行器10接收到操控信号A,相对应地被操控,并且实施相对应的动作。执行器10在这种情况下可以包括(不一定在结构上集成的)操控逻辑,所述操控逻辑从操控信号A中确定第二操控信号,利用该第二操控信号那么引起操控信号A的实现。
在其他实施形式中,控制系统40包括传感器30。在又一实施形式中,控制系统40替选地或者附加地也包括执行器10。
在其他优选实施形式中,控制系统40包括一个或者多个处理器45和至少一个机器可读取的存储介质46,在所述机器可读取的存储介质46上存储有指令,当所述指令在处理器45上实施时,所述指令那么促使控制系统40,实施根据本发明的方法。
在替选的实施形式中,替选于执行器10或者除了执行器10以外,设置有显示单元10a。
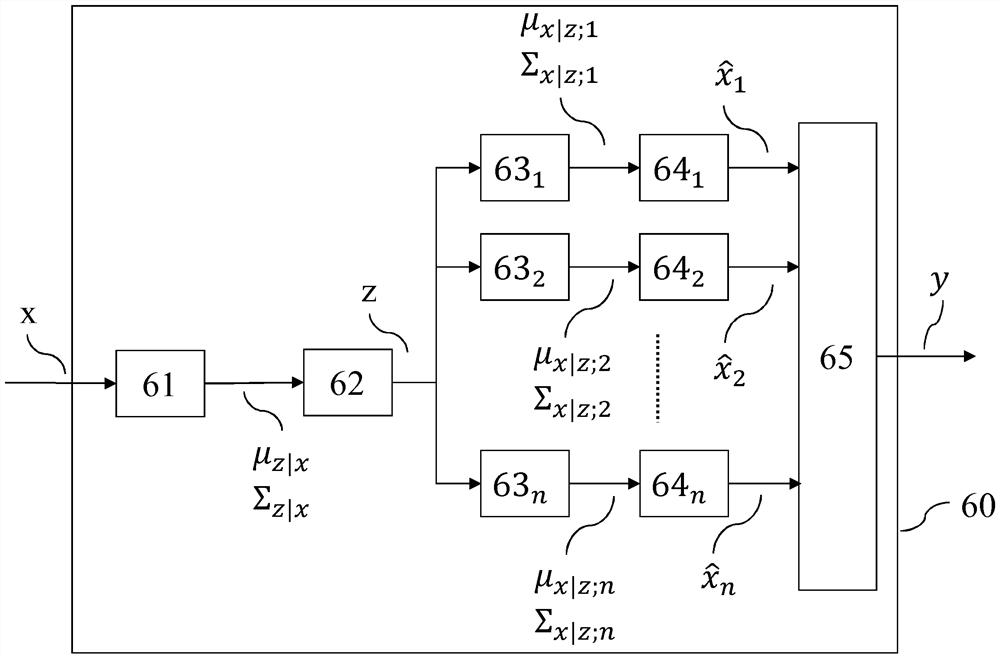
图2示出了自编码器60的示例性结构。自编码器60包括编码器(英语为:“Encoder”)61,借助所述编码器61从输入信号x中确定中间变量z。相对于输入信号x,减小中间变量z的维度。自编码器60此外还包括解码器(英语为:“Decoder”)63
在所示出的实施例中,自编码器60实施为所谓的“变分自编码器”(缩写:VAE)。VAE的特点在于,编码器61根据输入信号x确定参数
那么,从通过参数
这些中间变量z被输送给解码器63
从通过参数
编码器61和/或解码器63
图3示出了一个实施例,其中控制系统40被用于控制至少部分自主的机器人(这里为至少部分自主的机动车100)。
传感器30例如可以是一个或者多个优选地布置在机动车100中的视频传感器、和/或一个或者多个雷达传感器、和/或一个或者多个超声传感器、和/或一个或者多个激光雷达(LiDAR)传感器、和/或一个或者多个位置传感器(例如GPS)。替选地或者附加地,传感器30也可以包括信息系统,所述信息系统确定关于执行器系统的状态的信息,所述执行器系统如例如天气信息系统,所述天气信息系统确定在环境20中的天气的当前状态或者将来的状态。
输入信号x例如可以包含关于在至少部分自主的机器人的环境中的所探测到的目标的信息。
优选地布置在机动车100中的执行器10例如可以是机动车100的制动器、驱动器或者转向装置。操控信号A那么可以被确定为使得:该执行器或者所述执行器10在正常模式中被操控来使得防止机动车100例如与辨认出的目标的碰撞,尤其是当涉及确定类别的目标(例如涉及行人)时如此。在安全模式中,该执行器或所述执行器10可以被操控来使得,例如机动车100的速度被限制到可预先给定的速度范围上。
替选地,至少部分自主的机器人也可以是另外的移动机器人(未绘出),例如是通过飞行、漂浮、潜水或者迈步走而前进的机器人。移动机器人例如也可以是至少部分自主的割草机,或者可以是至少部分自主的清洁机器人。在这些情况下,操控信号A也可以在正常模式中被确定为使得,移动机器人的驱动器和/或转向装置被操控来使得至少部分自主的机器人例如防止与辨认出的目标的碰撞。
在其他替选方案中,至少部分自主的机器人也可以是园艺机器人(Gartenroboter)(未绘出),所述园艺机器人利用成像传感器30来确定在环境20中的植物的类型或者状态。执行器10那么例如可以是化学品的注施机(Applikator)。在正常模式中,根据植物的所确定的类型或者所确定的状态,可以确定操控信号A来使得,施加对应于所确定的类型或者所确定的状态的数量的化学品。在安全模式中,操控信号A可以被选择为使得,所施加的数量的化学品被限制到可预先给定的化学品范围上。
在又一替选方案中,至少部分自主的机器人也可以是家用电器(未绘出)、尤其是洗衣机、炉、烤箱、微波炉或者洗碗机。利用传感器30(例如光学传感器),可以检测到利用家用电器来处理的对象的状态,例如在洗衣机的情况下为处于洗衣机中的洗涤物的状态。从其中,那么可以确定该对象的类型或者状态。操控信号A那么在正常模式中可以被确定为使得,根据对象的所确定的类型或者所确定的状态来操控家用电器。例如,在洗衣机的情况下,根据处于其中的洗涤物由何种材料制成,可以操控洗衣机。那么,根据已确定洗涤物的何种材料,可以选择操控信号A。操控信号A可以在安全模式中被选择为使得,家用电器(例如洗衣机)被断开。
图4示出了一个实施例,其中控制系统40被用于操控生产系统200的生产机器11,其方式是:控制生产机器11的执行器10被操控。生产机器11例如可以是用于冲压、锯开、钻孔和/或切割的机器。
那么,传感器30例如是光学传感器,该光学传感器例如检测生产产品的品质。可能的是,在正常模式中,控制生产机器11的执行器10根据生产产品12的所确定的品质而被操控,以便生产机器11相对应地实施生产产品12的随后的加工步骤。也可能的是,传感器30确定由生产机器11加工的生产产品12的品质,并且据此针对随后的生产产品来适配对生产机器11的操控。在安全模式中可以设置,执行器10被操控为使得,生产机器被断开。
图5示出了一个实施例,在所述实施例的情况下,控制系统40被用于控制个人助理250。传感器30例如是声学传感器,所述声学传感器接收用户249的语音信号。替选地或者附加地,传感器30也可以设立为,接收光学信号、例如用户249的姿势的视频图像。
根据传感器30的信号,控制系统40在正常模式中确定个人助理250的操控信号A,例如其方式是:机器学习系统执行姿势识别。那么,给个人助理250传送所确定的操控信号A,并且因此相对应地操控所述个人助理250。所确定的操控信号A尤其是可以被选择为使得,所确定的操控信号A与通过用户249所推测的期望的操控相对应。所推测的期望的操控可以根据所识别的姿势来确定。根据所推测的期望的操控,控制系统40那么可以选择用于向个人助理250传送的操控信号A;和/或对应于所推测的期望的操控250,控制系统40那么可以选择用于向个人助理传送的操控信号A。
相对应的操控例如可以包含,个人助理250从数据库中调用信息,并且以针对用户249可接受的方式再现所述信息。
在安全模式中可以设置,个人助理250被断开,或者输出错误消息。
代替个人助理250,也可以设置有家用电器(未绘出)、尤其是洗衣机、炉、烤箱、微波炉或者洗碗机,以便相对应地被操控。
图6示出了一个实施例,在所述实施例的情况下,控制系统40被用于控制进入系统300。进入系统300可以包括物理进入控制装置、例如门401。传感器30例如可以是光学传感器(例如用于检测图像数据或者视频数据),所述光学传感器设立为检测面部。控制系统40可以解释检测到的图像。例如,可以确定人员的身份。执行器10可以是锁,该锁在正常模式中根据操控信号A释放进入控制装置,或者不释放进入控制装置,例如打开门401,或者不打开门401。为此,根据解释,例如根据人员的所确定的身份,可以选择操控信号A。在安全模式中可以设置,执行器10例如持久地被操控,使得门持久地打开(或者替选地也持久地关闭)。代替物理进入控制装置,也可以设置逻辑进入控制装置。
图7示出了一个实施例,在所述实施例的情况下,控制系统40被用于控制监控系统400。该实施例与在图6中所示出的实施例的不同之处在于,代替执行器10,设置有显示单元10a,所述显示单元10a由控制系统40来操控。例如,由异常探测器80可以确定,由光学传感器记录的目标是否是可疑的。如果情况如此,则可以激活安全模式。在正常模式中,那么该目标可以被显示单元10a正常再现,而在安全模式中,并且操控信号A那么可以被选择为使得,该目标由显示单元10a在色彩上突出地示出。
图8示出了一个实施例,在所述实施例的情况下,控制系统40被用于控制医学成像系统500、例如MRT设备、X射线仪或者超声设备。传感器30例如可以通过成像传感器来给出,通过控制系统40来操控显示单元10a。例如,由异常探测器80可以确定,由成像传感器记录的区域是否是引入注目的。如果情况如此,则可以激活安全模式。在正常模式中,那么该区域可以正常地被再现;在安全模式中,操控信号A可以被选择为使得,所述区域由显示单元10a在色彩上突出地示出。
图9示意性地示出了用于训练自编码器60的训练系统140的实施例。训练数据单元150确定合适的输入信号x,所述输入信号x被输送给经过修改的形式的自编码器60,该经过修改的形式的自编码器60用附图标记60‘标示。例如,训练数据单元150访问计算机实施的数据库,在所述计算机实施的数据库中存储有训练数据集合,并且训练数据单元150例如随机地从训练数据集合中选出输入信号x。所述输入信号x被输送给评价单元180,所述评价单元180的结构在图11中示例性地图示。
经过修改的自编码器60‘设立为,根据输送给它的输入信号x、从输送给它的输入信号x中确定所属的训练输出信号y
评价单元180例如可以借助与输入信号x和训练输出信号y
图10图示了经过修改的自编码器60‘的实施形式,所述经过修改的自编码器60‘在很大部分中与在图2中所示的自编码器60一致。尤其是,利用参数φ、θ进行参数化是一致的。在下文,仅仅要示出不同之处。经过修改的自编码器60‘代替评价器65具有经过修改的评价器65‘,所述经过修改的评价器65‘恰好如评价器65那样确定输出信号y。根据模式信号m,那么判定,可用的变量中的哪些变量作为输出信号y
图11示出了评价单元180的示例性的实施形式。评价单元180包括鉴别器181,给所述鉴别器181(例如经由开关183来选出地)要么输送输入信号x,要么输送从训练输出信号y
图12示出了用于训练自编码器60(或经过修改的自编码器60)的方法。该方法起始(1000)于与模式信号m有关的如下选出:实施接下来的部分方法(1001)-(1004)中的哪个部分方法。在步骤中,给鉴别器181分别输送信号x、y,并且鉴别器181根据所述信号x、y确定特征变量
接着(1200),例如利用梯度下降方法,适配参数化自编码器60的参数φ、θ,或适配参数化鉴别器181的参数。在这种情况下,自编码器60的参数φ、θ在这种情况下被适配为使得,特征变量
这种适配可以以针对GAN常见的方式级联地进行,也就是说可以设置,在内环(iS)中首先训练自编码器60,并且在充分收敛的情况下,鉴别器181在外环(aS)中被训练。训练自编码器60的步骤在这种情况下可以被跳过。
如果不仅自编码器60的训练而且鉴别器181的训练都结束,则该方法结束(1400)。
图13图示了第一部分方法(1001)的实施形式。在这种情况下,给鉴别器181输送输入信号x、那就是例如真实图像。
鉴别器181现在对于这些输入信号中的每个输入信号都确定(1002)所属的概率变量p,所属的特征变量从其被确定为
该求和在这种情况下关于所有输入信号x进行,分别所属的概率变量p通过脚标来标示。由此,该部分方法结束。自编码器60的训练在步骤(1200)的紧接着的过程中取消,也就是说仅鉴别器181被训练。
图14图示了第二部分方法(1002)的实施形式。在这种情况下,操控经过修改的自编码器60‘,使得采样器62从具有平均值0和方差1的正态分布
被确定。该求和在这种情况下关于所产生的假设的所有假设进行,分别所属的概率变量p通过脚标来标示。由此,该部分方法结束。自编码器60的训练在步骤(1200)的紧接着的过程中取消,也就是说仅鉴别器181被训练。
图15图示了第三部分方法(1003)的实施形式。在这种情况下,给经过修改的自编码器60‘输送(1013)输入信号x,并且从相对应的概率分布中分别得出(1023)中间变量z。接着(1033),由所述采样器64
被确定。该求和在这种情况下关于输入信号x的所有输入信号进行,分别所属的概率变量p通过脚标来标示。由此,该部分方法结束。
图16图示了第四部分方法(1004)的实施形式。该第四部分方法(1004)以步骤(1014)和(1024)开始,所述步骤(1014)和(1024)与第三部分方法(1003)的步骤(1013)和(1023)一致。接着(1034),由采样器64
都被确定,其中n标示对于输入信号x生成的假设的数目,并且j指示假设。从中,特征变量
被确定。该求和在这种情况下关于所有输入信号x进行,分别所属的平均值
图17图示了控制系统40的运行的实施形式。首先(2000),给自编码器60输送输入信号x。从中,自编码器60接着(2100)确定假设
由此,该方法结束。
在其他优选实施形式中,训练系统140包括一个或者多个处理器145和至少一个机器可读取的存储介质146,在所述机器可读取的存储介质146上存储有指令,当所述指令在处理器145上实施时,所述指令那么促使控制系统140,实施根据本发明的方法。
应理解的是,这些方法不仅可以如所描述的那样完全以软件来实施。这些方法也可以以硬件来实施,或者以由软件和硬件构成的混合形式来实施。
- 分类传感器数据和确定操控执行器的操控信号的方法和设备
- 用于设定用于操控车辆安全装置的操控信号的方法和控制设备