驱动和感测平衡、全耦合3轴陀螺仪
文献发布时间:2023-06-19 10:46:31
相关申请的交叉引用
本申请要求2018年9月21日提交的美国非临时专利申请序列号16/138,637的优先权,其标题为“驱动和感测平衡、全耦合3轴陀螺仪”,其公开内容通过引用全部并入本文。
技术领域
本发明通常涉及角速度感测器(angular velocity sensor),更具体地,本发明涉及包括制导质量块系统(guided mass system)的角速度感测器。
背景技术
通常使用振动速率陀螺仪(vibratory rate gyroscope)进行角速度感测。振动速率陀螺仪广泛地通过驱动感测器进入第一运动并测量感测器的第二运动来运作,该第二运动响应于该第一运动和待感测的角速度两者。
此外,传统的振动速率微机电系统(microelectromechanical system;MEMS)陀螺仪可能无法提供适当的解决方案,以降低对振动和部件间耦合(part-to-part coupling)的敏感性,降低悬浮力引起的同相位偏移(in-phase offset shift),和/或降低对封装应力的敏感性。
因此,期望提供一种克服上述问题的系统和方法。本发明解决了这种需要。
上述缺陷仅旨在概述传统实施的一些问题,并非详尽无遗。传统实现和技术的其它问题,以及本文所描述的各个方面的相应优点,在检阅以下描述之后可以变得更加明显。
发明内容
以下是本说明书的简化摘要,以提供对本说明书某些方面的基本理解。此摘要不是对说明书的全面概述。其意在既不识别说明书的关键或关键元素,也不描绘说明书的任何实施例的特定范围或权利要求的任何范围。其唯一目的是以简化的形式呈现说明书的一些概念,作为后面更详细描述的前奏。
公开了一种线性和角动量平衡的3轴陀螺仪结构,用于更好的偏移稳定性、振动抑制和较低的部件间耦合。在非限制性实施例中,描述了一种线性和角动量平衡的3轴陀螺仪结构,其可以包括一个或多个内框(inner frame)陀螺仪、耦合到一个或多个内框陀螺仪的两个或多个驱动梭(drive shuttle)、耦合到内框陀螺仪的两个或多个验证质量块(proofmass)、和/或耦合到内框陀螺仪的一个或多个外框(outer frame)陀螺仪或鞍形(saddle)陀螺仪。
本文所述的各种实施例可有助于提供线性和角动量平衡的3轴陀螺仪结构,以获得更好的偏移稳定性、振动抑制和较低的部件间耦合。进一步的非限制性实施例可以指向与本文所描述的各种实施例相关联的方法。
下面更详细地描述这些和其它实施例。
附图说明
参考附图进一步描述各种非限制性实施例,其中:
图1为根据本发明的非限制性方面所示的示例性陀螺仪架构的非限制性实施例的功能框图;
图2示出了驱动运动中的示例性陀螺仪架构的非限制性实施例(例如,对应图10)的功能框图,其示出了本发明的进一步非限制性方面;
图3描绘了如本文所述的示例性陀螺仪架构的非限制性实施例的进一步方面;
图4描绘了示例性陀螺仪架构的非限制性实施例的又一示例性方面;
图5描绘了示例性陀螺仪架构的非限制性实施例的又一示例性方面;
图6描绘了示例性陀螺仪架构的非限制性实施例的又一示例性方面;
图7描绘了根据本发明的非限制性方面的示例性陀螺仪架构的又一非限制性实施例;
图8描绘了根据本文描述的进一步非限制性方面的示例性陀螺仪架构的非限制性实施例的示例性驱动模式形状;
图9描绘了根据本文描述的又一非限制性方面的示例性陀螺仪架构的非限制性实施例的示例性GX模式形状;
图10描绘了根据本文描述的又一非限制性方面的示例性陀螺仪架构的非限制性实施例的示例性GY模式形状;
图11描绘了根据本文所描述的非限制性方面的示例性陀螺仪架构的非限制性实施例的示例性GZ感测模式形状;
图12描绘了根据本文描述的又一非限制性方面的示例性陀螺仪架构的非限制性实施例的示例性GZ寄生模式形状;
图13示出了根据本发明的进一步非限制性方面的示例性陀螺仪架构的其它非限制性实施例的功能框图;以及
图14示出了根据本发明的进一步非限制性方面的示例性陀螺仪架构的其它非限制性实施例的另一功能框图。
具体实施方式
本发明通常涉及角速度感测器,更具体地,涉及包括制导质量块系统的角速度感测器。提供以下描述以使本领域的普通技术人员能够制造和使用本发明,并且在专利申请及其要求的上下文中提供以下描述。对优选实施例的各种修改以及本文所描述的一般原理和特征对于本领域技术人员将是显而易见的。因此,本发明并不打算局限于所示的实施例,而是被赋予与本文所描述的原理和特征一致的最宽范围。所以,尽管提供了简要概述,本文描述或描绘的本发明的某些方面仅出于说明而非限制的目的。因此,由所公开的装置、系统和方法建议的所公开的实施例的变化意在被包含于本文公开的主题的范围内。
如上所述,传统的MEMS振动速率陀螺仪可能无法提供适当的解决方案,以降低对振动(例如,线性振动和/或角振动)和部件间耦合的敏感性,降低悬浮力引起的同相位偏移,和/或降低对封装应力的敏感性。本文描述的各种实施例可以克服传统的MEMS振动速率陀螺仪的这些和/或相关缺点中的一个或多个。
本发明提供了具有完全耦合感测模式的示例性3轴(例如,GX、GY和GZ)线性和角动量平衡振动速率陀螺仪架构。在非限制性方面,如本文所述,各种示例性实施例可以采用平衡驱动和/或平衡感测组件来减少诱导振动和/或部件间耦合。在另一非限制性方面中,如本文进一步描述的,各种示例性实施例可以采用应力隔离框来减少封装引起的应力。在另一非限制性方面中,各种示例性实施例可采用机械耦合来促进线性振动抑制。在又一非限制性方面中,各种示例性实施例可以使用一个或多个驱动梭来拒绝由悬浮力引起的同相位偏移。此外,如本文所述,各种示例性实施例可有利于制造由于平面内(in-plane)和平面外(out-of-plane)陀螺仪的解耦合(decouple)而在横轴敏感性方面具有改进的陀螺仪。
作为非限制性示例,示例性实施例可包括两个内框(例如,GY)陀螺仪,其中内框陀螺仪可促进GY感测模式并可促进驱动系统耦合,一个外框(例如,GX)陀螺仪,其中,外框陀螺仪可促进GX感测模式并可促进驱动系统耦合,耦合到两个内框陀螺仪或外框陀螺仪的四个驱动梭,耦合到内框陀螺仪的四个GZ验证质量块(proof mass),和/或促进耦合GZ验证质量块的耦合机构,耦合内框陀螺仪,和/或促进内框陀螺仪与外框陀螺仪和/或驱动梭的耦合。在更进一步的非限制性方面,各种示例性实施例可被配置为使得组件可从示例性总体架构中移除以制造单轴或双轴陀螺仪和/或可被配置为使得验证质量块的数量可从示例性总体架构中减半以制造半陀螺仪,如本文进一步描述。例如,根据非限制性方面,通过从架构中删除组件,可以将示例性3轴(例如,GX、GY和GZ)陀螺仪简化为2轴或1轴陀螺仪。通过使用较少的感测传感器(sense transducer)等,并且通过放弃示例性3轴(例如,GX、GY和GZ)陀螺仪架构的驱动和/或感测平衡方面,可以将本文所述的示例性陀螺仪架构功能性地切成两半以创建更紧凑的3轴(例如,GX、GY和GZ)陀螺仪。
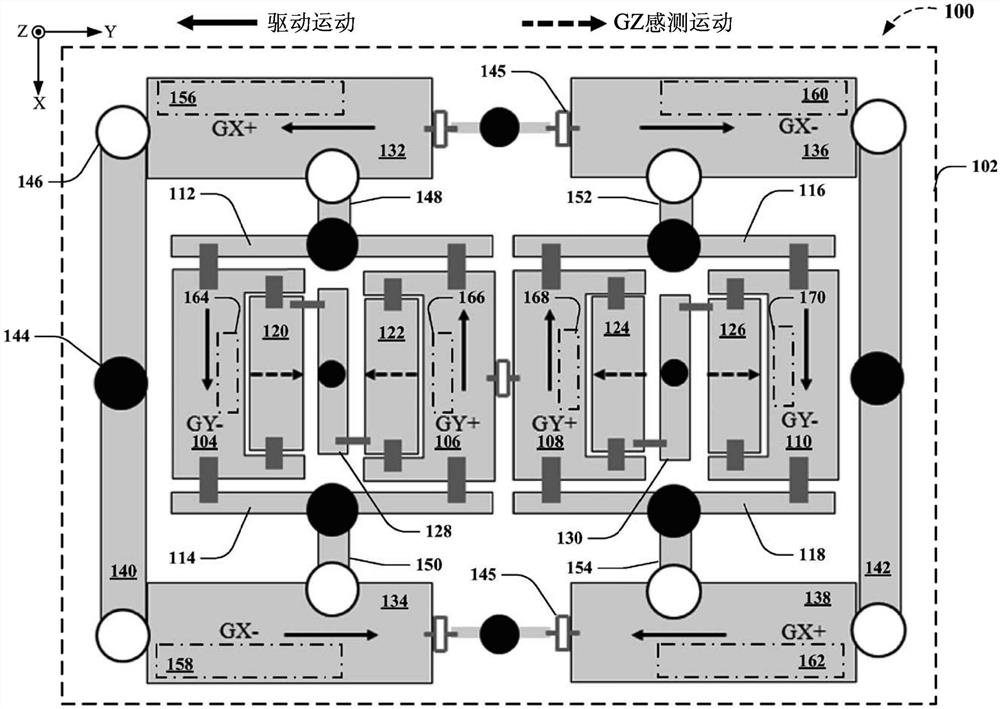
图1示出了根据本发明的非限制性方面的示例性陀螺仪架构100的非限制性实施例的功能框图。作为非限制性示例,陀螺仪架构100的示例性实施例可以包括设置在平行于基板102的X-Y平面中的MEMS装置,并且可以包括两个内框(例如,GY)陀螺仪,每个内框(例如,GY)陀螺仪可以包括两个内框验证质量块(例如,GY验证质量块104、106、108、110),与杠杆臂(lever arm)112、114、116、118耦合,其中内框陀螺仪被配置成有助于提供GY感测模式,或测量与MEMS装置绕一个轴(例如,Y轴)相关联的角速度分量(component),并且可被配置成将驱动系统与内框陀螺仪耦合。在另一非限制性方面,陀螺仪架构100的示例性实施例可包括将两个内框(例如,GY)陀螺仪彼此耦合的耦合机构。在另一非限制性方面中,陀螺仪架构100的示例性实施例可包括含有四个驱动梭(未示出)的驱动系统,包括制导质量块且被配置成分别耦合到两个内框陀螺仪。
在另一个非限制性方面,示例性陀螺仪架构100可包括四个GZ验证质量块(例如,GZ验证质量块120、122、124、126),其被配置为分别通过耦合机构128和130(例如,通过弹簧和/或其它耦合结构)彼此耦合,其中,四个GZ验证质量块(例如,GZ验证质量块120、122、124、126)的相应对(pair)通过耦合机构或杠杆臂128、130彼此耦合,该耦合机构或杠杆臂128、130被配置为耦合四个验证质量块(例如,GZ验证质量块120、122、124、126)运动的相应对,且其中,四个GZ验证质量块(例如,GZ验证质量块120、122、124、126)可被配置为便于提供GZ感测模式,或测量与MEMS装置绕另一个轴(例如,Z轴)相关联的角速度分量。在又一非限制性方面中,示例性陀螺仪架构100可包括外框陀螺仪或含有两个外框陀螺仪的鞍形(例如,GX)陀螺仪(例如,GX),包括两对两个验证质量块(例如,GX验证质量块132、134、136、138),其中,该GX、外框或鞍形陀螺仪可被配置成有助于提供GX感测模式,或测量与该MEMS装置绕另一个轴(例如,X轴)相关联的角速度分量,可被配置为分别耦合到内框陀螺仪,并且可配置为耦合驱动系统和外框陀螺仪,其中,两个GX验证质量块(例如,GX验证质量块132/134、136/138)的相应对可被配置为彼此耦合,且其中,该对的相应GX验证质量块(例如,GX验证质量块132/134、136/138)可被配置为经由相应的外框杠杆臂140/142彼此耦合。
在其它非限制性方面中,示例性陀螺仪架构100可包括示例性锚定(anchor)点(例如,本文中描绘为具有X的矩形),其可有助于将各种组件锚定到基板102和/或锚定到配置成附接至基板102或封装的示例性应力隔离框(未示出)。在进一步的非限制性方面中,图1的示例性陀螺仪架构100被描绘为包括示例性固定枢轴(pivot)点144(例如,黑色填充圆),其在功能上可表示各种组件可被配置为绕其旋转的中心(例如,在平行于基板102的X-Y平面的平面中,在与基板102的X-Y平面正交的平面中,等等),其可包括示例性锚定点,并包括示例性平移枢轴点146(例如,白色填充圆),其可在功能上表示各种组件可被配置为绕其旋转和平移(translate)的枢轴点或铰链(hinge),(例如,在平行于基板102的X-Y平面的平面中,在与基板102的X-Y平面正交的平面中,等等)。这些示例性枢轴点可以被理解为旋转运动的中心的功能表示,作为通过MEMS制造来创建此类装置所需的过程的结果,MEMS制造通常包括一组弹簧、挠曲体(flexure)、刚体或悬挂机构或设置成产生所需运动的组件,如本文所进一步描述的。
因此,图1的示例性陀螺仪架构100被描绘为包括示例性弹簧(例如,弹簧145)、悬挂元件或耦合机构,其可包括挠曲体或特别为刚性的其它结构,或在特定方向上柔性和/或扭转兼容,以约束或定义示范陀螺仪架构100的各种组件的运动(例如,反相位运动、平面内运动、制导质量块的制导质量块运动等)和/或传递运动,例如,将示例性陀螺仪架构100的各种组件悬挂到示例性锚定点302,如图3所示,如本文进一步描述的,用作示例性固定枢轴点144和/或示例性平移枢轴点146等。
作为非限制性示例,图1的示例性陀螺仪架构100被描绘为包括外框或鞍形(例如,GX)陀螺仪(例如,GX、外框或鞍形陀螺仪),其可包括两个GX外框陀螺仪,包括两对两个验证质量块(例如,GX验证质量块132、134、136、138),其中GX、外框或鞍形陀螺仪可被配置成分别耦合到内框陀螺仪(例如,通过耦合148/150),耦合到包括GY验证质量块104、106的示例性GY框陀螺仪的杠杆臂112/114,从而有助于在示例性GY框陀螺仪的杠杆臂112/114和GX验证质量块132/134之间提供固定枢轴点。同样地,示例性GX、外框或鞍形陀螺仪可被配置成分别耦合到内框陀螺仪(例如,通过耦合152/154),耦合到包括GY验证质量块108、110的示例性GY框陀螺仪的杠杆臂116/118,从而有助于在示例性GY框陀螺仪的杠杆臂116/118和GX验证质量块136/138之间提供固定枢轴点。例如,在图3至图6中示意性地示出了这种示例性耦合。
作为另一个非限制性示例,四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)的相应对可以通过耦合机构或杠杆臂128、130彼此耦合,该耦合机构或杠杆臂128、130被配置为耦合四个验证质量块(例如,GZ验证质量块120/122、124/126)运动的相应对。例如,示例性GZ验证质量块120通过耦合机构或杠杆臂128耦合到示例性GZ验证质量块122,并且被配置为由于与MEMS装置绕Z轴相关联的角速度分量,而迫使四个验证质量块(例如,示例性GZ验证质量块120/122)的相应对进入反相位(anti-phase)运动,通常在X-Y平面中,平行于示例性基板102。例如,这种示例性耦合在图1中功能性地示出作为耦合机构或杠杆臂128绕固定枢轴点的旋转,以耦合机构或杠杆臂128为中心,并且在图3至图6中示意性地示出。
作为另一个非限制性示例,两个示例性内框陀螺仪可配置为彼此耦合(例如,在功能性地示出为通过弹簧耦合示例性GY验证质量块106至示例性GY验证质量块108,例如示意性地示出为与GX验证质量块136相关联的图1的弹簧145),以便于将与两个GY或内框陀螺仪相关联的运动限制为线性和角动量平衡的条件。例如,如本文中进一步描述的,示例性GY验证质量块106可以经由弹簧或其它结构或结构的组合耦合到示例性GY验证质量块108,该弹簧或其它结构或结构的组合可以促进将与两个内框陀螺仪相关联的运动限制为线性和角动量平衡的条件,如本文进一步描述的。例如,这种耦合在图3至图6中示意性地示出。在另一个非限制性示例中,两个示例性GX或外框(鞍形)陀螺仪,每个包括两个验证质量块(例如,GX验证质量块132、134、136、138)可分别耦合到两个示例性GY或内框陀螺仪,和/或可配置为耦合两个示例性GX、外框、或鞍形陀螺仪到四个驱动梭(未示出),如本文进一步描述的。例如,这种耦合在图3中示意性地示出为GX验证质量块136和138(132和134)之间的GY验证质量块108/110(104/106)(例如,通过弹簧、挠曲体、驱动梭、杠杆臂112、114、116、118等),从而为GY验证质量块104、106、108、110横向穿过GX验证质量块132、134、136、138提供旋转轴,同时将GY验证质量块104和106(108和110)的各自运动转移到GX验证质量块132、134、136、138。例如,在图3至图6中示意性地示出了这种示例性耦合。
此外,图1的示例性陀螺仪架构100被描绘为包括各种感测电极或传感器(transducer)元件,其可分别被配置为检测示例性陀螺仪架构100的各种验证质量块或其它组件的运动,例如检测在各种验证质量块上由于科里奥利力(Coriolis force)引起的运动而提供关于X、Y或Z轴的角速度的测量值,以检测驱动运动等。尽管在本说明书中描述了静电致动器(electrostatic actuator)和传感器,但是本领域的普通技术人员将认识到,可以使用各种致动器和/或传感器来实现这些功能,并且这些使用将纳入本发明的精神和范围内。例如,示例性致动器和/或传感器可包括压电、热、电磁类型的致动器和/或传感器等。在非限制性方面,示例性陀螺仪架构100可包括电容电极156、158、160、162,其配置为分别检测示例性GX验证质量块132、134、136、138的运动,且可包括电容电极164、166、168、170,其配置为分别检测示例性GY验证质量块104、106、108、110的运动,等等。如本文进一步描述的,可以理解,示例性电容电极156、158、160、162、164、166、168、170可以被配置成主要有助于检测由于与MEMS装置绕各个轴(例如,X或Y轴)相关联的角速度而作用于各个验证质量块上的科里奥利力。如本文进一步描述的,这些科里奥利力作为与MEMS装置绕各个轴(例如,X或Y轴)相关联的角速度的结果作用在各个验证质量块上,可以导致各个验证质量块的平面外运动,其中平面外运动被定义为沿Z轴方向的运动(例如,在X-Y平面外)。
另外,图1的示例性陀螺仪架构100被描绘为在图2中的特定时刻经历驱动运动,该特定时刻由在示例性陀螺仪架构100的各个组件的方向上的实心箭头指示。如本文进一步描述的,为了产生驱动运动,可以使用可分别耦合到示例性驱动梭(未示出)的示例性驱动梳(未示出)施加静电力,该示例性驱动梭可以包括配置成耦合到两个内框陀螺仪GX的制导质量块,如本文所述的GX、外框或鞍形陀螺仪和/或其组合或部分。通过在驱动频率下向各个示例性驱动梳(未示出)施加交流(AC)电压,可以通过示例性驱动梳(未示出)向示例性驱动梭(未示出)施加静电力,以在驱动频率下产生驱动力,这可以导致如图1所示的示例性陀螺仪架构100的各个组件的驱动运动。施加到各个示例性驱动梭(未示出)的驱动力被配置成通过如上所述的耦合机构、杠杆臂、枢轴点和弹簧传递到示例性陀螺仪架构100的各个组件,这导致示例性陀螺仪架构100的各种组件的驱动运动,如图1所示,并导致示例性陀螺仪架构100的各种组件的平移,如图2所示。请注意,图2描绘了示例性陀螺仪架构100的各种组件的偏转,这是由于在驱动运动的给定方向为正(例如,GX+,GY+),或在MEMS装置的X-Y平面上方,或为负(例如,GX-,GY-),或在MEMS装置的X-Y平面下方的情况下,来自绕各个轴的角速度而产生的科里奥利力(Coriolis force)所造成的。
请注意,如上所述,四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)被配置为分别耦合(例如,通过弹簧或其它耦合结构)到四个GY验证质量块104、106、108、110,其中四个GZ验证质量块(例如,GZ验证质量块120、122、124、126)的相应对是通过耦合机构或杠杆臂128、130彼此耦合,该耦合机构或杠杆臂128、130被配置成耦合四个验证质量块(例如,GZ验证质量块120、122、124、126)运动的相应对。如本文进一步描述的,由于与MEMS装置绕Z轴相关联的角速度,作用在各个GZ验证质量块(例如,GZ验证质量块120、122、124、126)上的科里奥利力可导致各个GZ验证质量块(例如,GZ验证质量块120、122、124、126)通常在平面内的运动,其中,平面内运动被定义为沿X轴方向(例如,在X-Y平面内)的运动,如图所示。因此,图1的示例性陀螺仪架构100的各个GZ验证质量块(例如,GZ验证质量块120、122、124、126)被描绘为在特定时刻经历感测运动,这由图2中示例性陀螺仪架构100的各个组件的方向上的虚线箭头指示。
因此,作为另一个非限制性示例,示例性陀螺仪架构100可以包括另外的电容电极(未示出),其可以被配置成分别检测各个GZ验证质量块(例如,GZ验证质量块120、122、124、126)的运动。如本文进一步描述的,可以理解,这样的示例性电容电极可以被配置成主要有助于检测由于与MEMS装置绕Z轴相关联的角速度而作用在各个验证质量块上的科里奥利力。如上所述,尽管上述传感器、电极或致动器(例如,驱动梳)被描述为电容式传感器、电极或致动器,但是可以使用各种类型的传感器、电极或致动器,包括但不限于压电、热、电磁、光学等,视情况而定,其使用将被纳入本发明的精神和范围内。
图2示出了驱动运动中示例性陀螺仪架构的非限制性实施例(例如,对应的图1)的功能框图200,其示出了本发明的进一步非限制性方面。图2描绘了示例性陀螺仪架构100的各个组件产生的平移和旋转运动,该运动是由于通过上述耦合机构、杠杆臂、枢轴点和弹簧施加到各个示例性驱动梭(未示出)并转移到示例性陀螺仪架构100的各个组件的驱动力的结果,如上所述。进一步注意,为了清楚起见,在功能框图200中未示出如图1所示的示例性陀螺仪架构100的一些参考字符和/或组件。
从图1至图2的检阅中可以看出几个要点。首先,注意,根据各种非限制性实施例,各个验证质量块和组件的驱动运动是线性和/或角动量平衡的。也就是说,示例性驱动梭(未示出)的驱动运动可以是反相位运动或相反方向,如本文进一步描述的。其次,两个内框陀螺仪的驱动运动也是反相位或相反方向的,这是由四个示例性驱动梭(未示出)的反相位驱动运动通过各自的示例性杠杆臂112、114、116、118耦合到GY验证质量块(例如,GY验证质量块104、106、108、110)所促进的,该示例性杠杆臂提供关于固定枢轴点的旋转和经由枢轴点的X验证质量块(例如,GX验证质量块132、134、136、138)的平移,并且通过将两个示例性GY或内框陀螺仪彼此耦合来促进(例如,功能性所示的通过弹簧耦合示例性GY验证质量块106到示例性GY验证质量块108,如图1中示例性所示的与GX验证质量块136相关联的弹簧145)。因此,两个内框陀螺仪组成一个四杆(bar)系统,在驱动运动的作用下,该系统变形为一个平行四边形。此外,示例性GX、外框或鞍形陀螺仪与相应GY或内框陀螺仪的耦合可确保GX、外框或鞍形陀螺仪的驱动运动也是反相位或相反方向的。最后,请注意,分别耦合(例如,通过弹簧或其它耦合结构)到GY验证质量块(例如,GY验证质量块104、106、108、110)的四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)的驱动运动也是反相位或相反方向的。因此,根据本文描述的示例性方面,如图1至图2所示的3轴(例如,GX、GY和GZ)陀螺仪的驱动运动可受益于线性和角动量平衡。
根据各种非限制性实施例,通过采用平衡质量块,并设置为使得其驱动运动彼此相反且使得其驱动运动的净线性动量和角动量为零,可以改进振动抑制。例如,通过耦合示例性陀螺仪架构100的各种组件,这些各种组件不会彼此独立地移动。如本文所使用的,在相同方向上的运动被称为普通运动(common motion)或普通模式,而在相反方向上的运动被称为反相位运动或差分运动。可以理解的是,普通运动容易受到来自外部源(例如振动)的加速度的影响,其中加速度可以被认为是均匀的物体载荷(body load)。因为它是均匀的,所以它的定义是在一个方向上,或者说是线性加速度。这种线性加速度将激发普通运动。然而,由于各种驱动运动在物理上是耦合的,以确保其为反相位(非普通)或相反方向,因此均匀的物体载荷或线性加速度不会在各种非限制性方面产生感测模式下的运动,从而提高了抑制振动的能力。此外,通过采用平衡质量块,并设置为使得它们的驱动运动彼此相反且使得它们的驱动运动的净线性动量和角动量为零,使得在驱动频率下施加到印刷电路板(PCB)的装置封装上的扭矩可以最小化。因此,在多个MEMS陀螺仪装置安装到同一PCB的示例性实现中,其中谐振频率彼此接近,如本文所述的示例性装置可以最小化串扰(cross-talk)或部件间耦合,否则,可能会导致由于质量块或动量不平衡而经历串扰的装置产生不希望的噪声和偏移。
注意,如图1中所示,图2描绘了示例性陀螺仪架构100的各种组件的偏转,这是由于在驱动运动的给定方向为正(例如,GX+,GY+),或高于MEMS装置的X-Y平面,以及为负(例如,GX-,GY-),或低于MEMS装置的X-Y平面的情况下,来自绕各个轴的角速度而产生的科里奥利力所造成的。因此,可以在图1至图2中看到,在给定的驱动运动下,以该驱动运动的给定方向绕各轴的角速度所产生的科里奥利力将导致GY或内框陀螺仪和GX、外框陀螺仪或鞍形陀螺仪的平面外(例如,偏离X-Y平面)偏转。如上所述,示例性电容电极156、158、160、162、164、166、168、170可配置为主要有助于检测作用于各个验证质量块上的科里奥利力,该科里奥利力是由于与MEMS装置绕各个轴(例如,X或Y轴)相关联的角速度而造成的。
然而,进一步注意,四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)分别耦合(例如,通过弹簧或其它耦合结构)到GY验证质量块(例如,GY验证质量块104、106、108、110),其中四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)通过耦合机构或杠杆臂128、130彼此耦合,该耦合机构或杠杆臂128、130被配置成耦合四个验证质量块(例如,GZ验证质量块120、122、124、126)运动的相应对。因此,四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)的驱动运动在Y方向上,并且在该驱动运动的给定方向上,来自绕Z轴的角速度的科里奥利力将导致X方向的平面内(例如,在X-Y平面内)偏转。因此,示例性陀螺仪架构100可包括进一步的电容电极(未示出),其可被配置成分别检测各个GZ验证质量块(例如,GZ验证质量块120、122、124、126)的运动,以主要有助于检测作用在各个验证质量块上的科里奥利力,该科里奥利力是由于与MEMS装置绕Z轴相关联的角速度造成的。
请注意,关于图1至图2的示例性驱动系统可与示例性GX、外框或鞍形陀螺仪、和/或示例性GY或内框陀螺仪解耦合,使得示例性GX、外框或鞍形陀螺仪和示例性GY或内框陀螺仪上的驱动运动可对称,和/或根据各种非限制性方面,可以配置包括GZ验证质量块(例如,GZ验证质量块120、122、124、126)的GZ陀螺仪,使得包括GZ验证质量块(例如,GZ验证质量块120、122、124、126)的GZ陀螺仪对平面外运动的依从性非常强。然而,如图11至图12所示,注意,在另一非限制性方面,如本文所述的示例性实施例可以在GZ感测模式上经历寄生模式。
如上所述,传统的MEMS振动速率陀螺仪可能无法提供适当的解决方案,以降低对振动(例如,线性振动和/或角振动)和部件间耦合的敏感性,降低悬浮力引起的同相位偏移,和/或降低对封装应力的敏感性。然而,根据各种非限制性实现,如本文所述,通过将示例性驱动系统放置在示例性驱动梭(未示出)中,并且通过在平面外陀螺仪(例如,GY或内框陀螺仪和GX、外框或鞍形陀螺仪)之间采用弱耦合,各种非限制性实施例可有助于最小化传递到GZ陀螺仪的平面外力或悬浮力,和/或其可被拒绝。此外,平面内和平面外陀螺仪的解耦合可以提高交叉轴敏感性。
这可以导致更好的偏移稳定性,因为作为测量感兴趣的量的感测器(例如,通过检测四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)上的科里奥利力所确定的绕Z轴的角速度),感测器被期望输出一个与角速度成比例的信号。通过在平面外陀螺仪(例如,GY或框陀螺仪和GX、外框或鞍形陀螺仪)和平面内陀螺仪(例如,GZ陀螺仪)之间解耦合或采用弱耦合,偏移或偏差误差,即感兴趣的量和所报告的量(例如,由于绕z轴的角速度而产生的科里奥利力)之间存在偏移量多寡,将减小GZ陀螺仪上的平面外力(或悬浮力),否则可能会被检测为施加的角速度。
例如,本文所述的各种实施例可以通过在GX和/或GY陀螺仪上使用示例性的驱动梭(未示出)来减小由悬浮力引起的同相位偏移。例如,如上所述,GY或内框陀螺仪以及GX、外框或鞍形陀螺仪是平面外陀螺仪,其中,MEMS装置绕X轴或Y轴旋转将导致GY验证质量块(例如,GY验证质量块104、106、108、110)和GX验证质量块(例如,GX验证质量块132、134、136、138)的平面外运动。由于四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)经由耦合机构或杠杆臂128、130彼此耦合,所以MEMS装置绕Z轴的旋转将仅导致四个示例性GZ验证质量块(例如,GZ验证质量块120、122、124、126)在平面内或平行于X-Y平面(即MEMS装置的平面)的运动。通过分别限定平面内运动分量(GZ)与平面外运动分量(GX、GY)的运动,并且通过将平面外运动分量(GX、GY)与柔性耦合机构(例如,经由耦合148、150、152、154)连接,平面内运动分量(GZ)(例如,GZ验证质量块120、122、124、126),与平面外运动分量(GX、GY)相关联的悬浮力(和相关联的偏移)的传输可以最小化。
图3描绘了如本文所述的示例性陀螺仪架构100的非限制性实施例的进一步方面。注意其中描述的示例性GY验证质量块(例如,GY验证质量块104、106、108、110)、示例性GX验证质量块(例如,GX验证质量块132、134、136、138)、它们之间的耦合、示例性杠杆臂112、114、116、118、锚定点302和各种弹簧145(例如,GZ弹簧304等)、耦合(例如,GX或外框陀螺仪至驱动梭的耦合306等)、悬挂元件等的相对位置和配置。
另外,图3描绘了根据其它非限制性方面的示例性应力隔离框308。回想一下,偏移可能是由驱动梭中产生的悬浮力引起的,也可能是由外部应力(例如,封装应力)引起的陀螺仪架构变形引起的。偏移也可受到诸如封装应力、温度效应等其它来源的影响。为了将封装变形与示例性装置解耦合,从而最小化封装变形引起的偏移,示例性应力隔离框308可用于各种非限制性实施例中。虽然在图1中未示出,但是示例性应力隔离框308可显示为连接到图3中所示的所有外部锚定点302。这里,请注意,示例性应力隔离框308可以连接到封装或基板102,并且示例性陀螺仪架构100的组件的外围组件可以悬挂在其上和/或锚定到包括但不限于四个示例性驱动梭310,示例性耦合机构或杠杆臂128、130等。因此,根据进一步的非限制性方面,可以改善封装弯曲或变形敏感性,其中,通过使用示例性应力隔离框308中的一个或多个以及示例性驱动梭310等,可以减少由与MEMS装置相关联的封装弯曲产生的偏移,如本文所述。
图3进一步描绘了可被配置为检测驱动运动的示例性驱动感测梳(drive sensecomb)312。注意,虽然在非限制性实施例中,示例性驱动感测梳312被描绘为耦合到GY或内框陀螺仪组件(例如,GY验证质量块104、106、108、110),但在进一步的非限制性实施例中,示例性驱动感测梳312可耦合到示例性陀螺仪架构100的各种组件中的其它组件,包括但不限于四个示例性驱动梭310中的一个或多个等。图3进一步描绘了示例性驱动梳314,其可耦合到示例性驱动梭310以在驱动频率下产生驱动力,并且其可导致示例性陀螺仪架构100的各个组件的驱动运动,如上文关于图1至图2所述。此外,图3描绘了可被配置成分别检测各个GZ验证质量块(例如,GZ验证质量块120、122、124、126)的运动的其它电容电极316,如上文关于图1至图2的进一步描述。
图4描绘示例性陀螺仪架构100的非限制性实施例的又一示例性方面。例如,图4描绘了在图3中的示例性电容电极156、158、160、162、164、166、168、170的相对位置,例如,如上文关于图1进一步描述的,其可被配置为主要有助于检测作用于各个验证质量块上的科里奥利力,该科里奥利力是由于与MEMS装置绕各轴(例如,X或Y轴)相关联的角速度而造成的。
图5描绘示例性陀螺仪架构100的非限制性实施例的又一示例性方面。注意,在图5中,锚定点302的位置被描绘为黑匣子,而不是如图1至图2所示那样。图5描绘了关于图6进一步描述的小图(inset)502。例如,图6描绘了示例性陀螺仪架构100的非限制性实施例的又一示例性方面。图6描绘了示例性陀螺仪架构100的各种组件的相对位置和配置,如图1至图5所示,用于小图502。图7描绘了示例性陀螺仪架构100的又一非限制性实施例,在图7的描绘中描绘了示例性电容电极156、158、160、162、164、166、168、170的相对位置,其可被配置为主要有助于检测作用在各个验证质量块上的科里奥利力,该科里奥利力是由于与MEMS装置绕各个轴(例如,X或Y轴)相关联的角速度造成的,例如,如上文关于图1和图4等所进一步描述的。进一步注意耦合机构或杠杆臂128、130的制造设计,其被配置为耦合四个验证质量块(例如,GZ验证质量块120、122、124、126)运动的相应对,其分别对应于GZ验证质量块的相应对之间的功能性固定枢轴点的构造,如上文关于图1至图2所述。
图8描绘了根据本文描述的进一步非限制性方面的示例性陀螺仪架构100的非限制性实施例的示例性驱动模式形状。如图2所示,如上所述经由四个示例性驱动梭310施加的驱动运动导致示例性陀螺仪架构100的各种组件的偏转和平移,如本文所述。在图8中可以从平面内运动分量(GZ)的相对缺乏位移看出,平面内运动分量(GZ)与平面外运动分量(GX)分离,并受到耦合机构或杠杆臂128、130的限制,该耦合机构或杠杆臂128、130被配置为耦合四个验证质量块(例如,GZ验证质量块120、122、124、126)运动的相应对,如本文所述的各种实施例可以被配置成将平面外运动分量(GX、GY)的传输限制到平面内运动分量(GZ)(驱动梭,Z验证质量块),并且因此,与平面外运动分量(GX、GY)相关联的悬浮力的传输可以最小化。
图9描绘了根据本文描述的又一非限制性方面的示例性陀螺仪架构100的非限制性实施例的示例性GX模式形状。图9描绘了X-Y平面上方和下方的相对位移,其中“+”符号表示X-Y平面上方的位移,而“-”符号表示平面下方的位移,以代替彩色热图或适当的灰度分辨率。在图9中可以看出,GX、外框或鞍形陀螺仪感测模式是平衡感测模式,其中每个GX验证质量块处于反相位运动中,如由图9所示的结构在功能上产生的示例性固定枢轴点所促进者。
图10描绘了根据本文描述的又一非限制性方面的示例性陀螺仪架构的非限制性实施例的示例性GY模式形状。图10描绘了X-Y平面上方和下方的相对位移,其中“+”符号表示X-Y平面上方的位移,而“-”符号表示平面下方的位移,以代替彩色热图或适当的灰度分辨率。在图10中可以看出,GY或框陀螺仪感测模式是平衡感测模式,其中每个GY验证质量块处于反相位运动(例如,线性和角动量平衡两者)。从图10的平面内运动分量(GZ)相对缺乏位移中可以进一步看出,其与平面外运动分量(GX)分离,并受到耦合机构或杠杆臂128、130的限制,该耦合机构或杠杆臂128、130被配置为耦合四个验证质量块(例如,GZ验证质量块120、122、124、126)运动的相应对,如本文所述的各种实施例可被配置成限制平面外运动分量(GX、GY)到平面内运动分量(GZ)的传输(驱动梭、Z验证质量块),从而限制与平面外运动分量(GX、GY)相关联的悬浮力的传输可以最小化。此外,从图10可以看出,它可以有助于隔离驱动梳(例如,驱动梳314)上的悬浮力,使其不会转移到框验证质量块。
图11描绘了根据本文所描述的非限制性方面的示例性陀螺仪架构的非限制性实施例的示例性GZ感测模式形状。图11描绘了X-Y平面中的相对位移,其中“+”符号表示+X位移,而“-”符号表示-X位移,以代替彩色热图或适当的灰度分辨率。在图11中可以看出,GZ陀螺仪感测模式是平衡感测模式,其中每个GZ验证质量块处于反相位运动中。
图12描绘了根据本文描述的又一非限制性方面的示例性陀螺仪架构的非限制性实施例的示例性GZ寄生模式形状。图12描绘了X-Y平面中的相对位移,其中“+”符号表示+位移,而“-”符号表示-位移,以代替彩色热图或适当的灰度分辨率。从图12中可以看出,GZ陀螺仪具有线性和角动量平衡寄生模式。
因此,示例性非限制性实施例可以包括3轴科里奥利振动速率陀螺仪,该陀螺仪具有大致2维的装置架构,其几何结构大体上是平坦的,并且能够用硅制造。在非限制性方面,如本文所述的示例性实施例可包括两个内框(例如,GY)陀螺仪,其中内框陀螺仪促进GY感测模式和驱动系统耦合,两个外框陀螺仪或鞍形陀螺仪、耦合到两个外框陀螺仪的四个驱动梭、耦合到GY或内框陀螺仪的四个GZ验证质量块、和/或有助于耦合GZ验证质量块的两个杠杆臂或耦合机构。在更进一步的非限制性方面,各种示例性实施例可被配置为使得组件可从示例性总体架构中移除以制造单轴或双轴陀螺仪和/或可被配置为使得验证质量块的数量可从示例性总体架构中减半以制造半陀螺仪,如本文进一步所述。
例如,图13示出了根据本发明的进一步非限制性方面的示例性陀螺仪架构100的其它非限制性实施例的功能框图。例如,根据非限制性方面,示例性3轴(例如,GX、GY和GZ)陀螺仪架构100可以通过从架构中移除组件、使用较少的感测传感器等而减小为2轴或1轴陀螺仪,并且通过放弃示例性3轴(例如,GX、GY和GZ)陀螺仪结构的驱动和/或感测平衡方面,本文所述的示例性陀螺仪架构可以在功能上切成两半以创建更紧凑的3轴(例如,GX、GY和GZ)陀螺仪。例如,如图13所示,可以省略四个GZ验证质量块来制造平衡双轴(例如,X-Y陀螺仪)。在另一非限制性方面中,如图15中所示,可从制造中省略两个GX验证质量块或外框陀螺仪和相应的GY或内框陀螺仪,以产生占平衡的2轴陀螺仪的一半占用面积(footprint)的2轴陀螺仪。在其它非限制性方面中,GY电极162、164、166、168可从制造或电性连接中省略,使得示例性陀螺仪架构100的变体可产生1轴陀螺仪。
在另一非限制性示例中,图14示出了根据本发明的进一步非限制性方面的示例性陀螺仪架构100的其它非限制性实施例的另一功能框图。例如,通过省略示例性陀螺仪架构100的一半组件,示例性陀螺仪架构100可以产生更紧凑但不平衡的驱动和感测3轴陀螺仪。其它变体可包括省略GZ验证质量块以产生如本文所述的具有耦合到GY或框陀螺仪的驱动系统的2轴X-Y陀螺仪。
因此,在其它非限制性实现中,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)包括一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪),例如,如本文所述,被配置为围绕第一轴(例如,Y轴)感测与MEMS装置(例如,包括示例性陀螺仪架构100或其部分)相关联的角速度的第一分量。如本文所使用的,框陀螺仪可以理解为包括由两个验证质量块和连接两个验证质量块并将验证质量块限制为反相位运动的旋转臂组成的制导质量块系统。如本文进一步使用的,可以理解外框陀螺仪环绕和/或柔性耦合到内框陀螺仪。
如本文进一步描述的,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)可进一步包括外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪),其被柔性耦合(例如,经由耦合148/150/152/154或其部分)到一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪),并且被配置为围绕可正交于第一轴(例如,Y轴)的第二轴(例如,X轴)感测与MEMS装置(例如,包括示例性陀螺仪架构100或其部分)相关联的角速度的第二分量。
此外,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)还可以包括耦合到一个或多个内框陀螺仪(例如,包括两个或更多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)的两个或多个验证质量块(GZ验证质量块120、122、124、126),并且被配置成围绕可正交于第一轴(例如,Y轴)和第二轴(例如,X轴)的第三轴(例如,Z轴)感测与MEMS装置(例如,包括示例性陀螺仪架构100或其部分)相关联的角速度的第三分量。
在非限制性方面,与两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)相关联的运动可通过各自的耦合机构(例如,通过耦合机构或杠杆臂128、130)至少部分地耦合到一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)的平面内运动(例如,X-Y平面),且其中,平面内运动可以参考包括第一轴(例如,Y轴)和第二轴(例如,X轴)的平面来定义。例如,在另一非限制性方面中,两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)可被配置成有助于至少部分地将与两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)相关联的运动限制成线性和角动量平衡的条件。
如本文进一步描述的,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)可进一步包括两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)之间的一个或多个耦合机构(例如,耦合机构或杠杆臂128、130),其被配置成由于绕第三轴(例如,Z轴)施加到MEMS装置(例如,包括示例性陀螺仪结构100或其部分)的角速度的第三分量而迫使两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)进入反相位运动。
此外,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)还可以包括两个或多个驱动梭(例如,驱动梭310),该驱动梭耦合(例如,通过杠杆臂112、114、116、118或其部分)到一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)或外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪),并且被配置成迫使该一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)或该外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪)中的一个或多个振动。在非限制性方面中,外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪)可至少部分地经由该两个或多个驱动梭(例如,驱动梭310),耦合到一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)。
在另一个非限制性方面,一个或多个外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪)、一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)、或两个或多个驱动梭中的一个或多个可配置为感测与振动相关联的驱动运动(例如,经由驱动感测梳312)。在另一非限制性方面中,两个或多个驱动梭(例如,驱动梭310)可被配置成以反相位驱动运动来移动,并且可被配置成最小化两个或多个驱动梭(例如,驱动梭310)的平面外运动到一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)的传输。
如本文进一步所述,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)可进一步包括一个或多个外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪)或一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)可被配置为由一组驱动电极(例如,驱动梳314)驱动,例如,如本文所述。
此外,在其它非限制性实施方式中,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)包括一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪),其被配置为围绕第一轴(例如,Y轴)感测与MEMS装置(例如,包括示例性陀螺仪架构100或其部分)相关联的角速度的第一分量,例如,如本文所述。
如本文进一步描述的,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)可进一步包括耦合到一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)的两个或多个验证质量块(例如,GZ验证质量块120、122、124、126),并且配置为围绕可正交于第一轴(例如,Y轴)的第二轴(例如,Z轴)感测与MEMS装置(例如,包括示例性陀螺仪架构100或其部分)相关联的角速度的第二分量。
此外,在其它非限制性实施方式中,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)包括两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)之间的一个或多个耦合机构,其配置成由于围绕第二轴(例如,Z轴)施加到MEMS装置(例如,包括示例性陀螺仪结构100或其部分)的角速度的第二分量而迫使两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)进入反相位运动,例如,如本文所述。在非限制性方面,与两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)相关联的运动可通过各自的耦合机构至少部分地耦合到一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)的平面内运动,且其中,平面内运动可参考垂直于第二轴的平面(例如,X-Y平面)来定义。在另一非限制性方面中,两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)可被配置成有助于至少部分地将与两个或多个验证质量块(例如,GZ验证质量块120、122、124、126)相关联的运动限定成线性和角动量平衡的条件。
如本文进一步描述的,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)可进一步包括耦合到该一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)的两个或多个驱动梭(例如,驱动梭310),该驱动梭被配置成迫使该一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)振动。在非限制性方面,两个或多个驱动梭(例如,驱动梭310)可以配置成以反相位驱动运动来移动,并且可被配置成最小化两个或多个驱动梭(例如,驱动梭310)到一个或多个内框陀螺仪(例如,包括两个或多个GY验证质量块104、106、108、110等的GY或内框陀螺仪)的平面外运动的传输。
在其它非限制性实施方式中,示例性MEMS装置(例如,包括示范性陀螺仪架构100或其部分)包括两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪),该内框陀螺仪被配置为感测与该MEMS装置(例如,包括示例性陀螺仪结构100或其部分)相关联的绕第一轴(例如,Y轴)的角速度的第一分量,例如,如本文所述。作为非限制性示例,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)可被配置为作为双轴陀螺仪或三轴陀螺仪中的一个或多个操作。在非限制性方面,两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)中的一个可柔性耦合(例如,通过弹簧或挠曲体145)到两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)中的另一个,并且配置成将两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)的平面外运动和平面内运动限制为同相位。
如本文进一步描述的,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)可进一步包括两个外框陀螺仪(例如,包括GX验证质量块132、134、136、138等的GX或外框陀螺仪)配置成围绕可正交于第一轴(例如,Y轴)的第二轴(例如,X轴)感测与MEMS装置(例如,包括示例性陀螺仪架构100或其部分)相关联的角速度的第二分量。在非限制性方面,两个外框陀螺仪(例如,包括GX验证质量块132、134、136、138等的GX或外框陀螺仪)可至少部分地经由四个驱动梭(例如,驱动梭310)耦合(例如,通过耦合148/150/152/154或其部分)到两个内框陀螺仪(例如,包括两个或更多GY验证质量块104、106、108、110等的GY或内框陀螺仪。在另一非限制性方面中,一个或多个外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪)、或两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)中的一个或多个可配置为由一组驱动电极(例如,如本文进一步描述的,驱动梳314)驱动。
作为另一个非限制性示例,两个外框陀螺仪(例如,包括GX验证质量块132、134、136、138等的GX或外框陀螺仪)可以柔性耦合(例如,通过耦合148/150/152/154或其部分)到两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪),并且被配置成将两个外框陀螺仪(例如,包括GX验证质量块132、134、136、138等的GX或外框陀螺仪)和两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)的平面外运动和平面内运动限制为同相位。
此外,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)还可以包括耦合到两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)的四个验证质量块(例如,GZ验证质量块120、122、124、126),并且配置成围绕可正交于第一轴(例如,Y轴)和第二轴(例如,X轴)的第三轴(例如,Z轴)感测与MEMS装置(例如,包括示例性陀螺仪架构100或其部分)相关联的角速度的第三分量。
此外,在其它非限制性实现中,一种示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分),其包括与成对(pair)的四个验证质量块(例如,GZ验证质量块120、122、124、126)相关联的两个耦合机构(例如,耦合机构或杠杆臂128、130),其被配置成由于围绕第三轴(例如,Z轴)施加到该MEMS装置(例如,包括示例性陀螺仪架构100或其部分)的角速度的第三分量而迫使成对的四个验证质量块(例如,GZ验证质量块120、122、124、126)进入反相位运动,并且配置为由于两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪),而在四个验证质量块(例如,GZ验证质量块120、122、124、126)中不产生净角动量(net angular momentum),例如,如本文所述。
如本文进一步描述的,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)还可以包括耦合到两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)或外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪)中的一个或多个的四个驱动梭(例如,驱动梭310),并且配置成迫使两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)或外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪)中的一个或多个振动。在非限制性方面中,可以配置一个或多个外框陀螺仪(例如,包括两个或多个GX验证质量块132、134、136、138等的GX或外框陀螺仪)、两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)、或四个驱动梭(例如,驱动梭310)中的一个或多个,以感测与振动相关联的驱动运动(例如,通过驱动感测梳312)。在另一非限制性方面中,成对的四个驱动梭(例如,驱动梭310)可被配置成以反相位驱动运动来移动,并且可被配置成最小化成对的四个驱动梭(例如,驱动梭310)到两个内框陀螺仪(例如,包括GY验证质量块104、106、108、110等的GY或内框陀螺仪)的平面外运动的传输,如本文进一步描述的。
此外,在其它非限制性实施方式中,示例性MEMS装置(例如,包括示例性陀螺仪架构100或其部分)包括与两个外框陀螺仪(例如,包括GX验证质量块132、134、136、138等的GX或外框陀螺仪)相关联的耦合机构(例如,经由固定枢轴点144和相应的外框杠杆臂140/142或其部分),其被配置成由于围绕第二轴(例如,X轴)施加到MEMS装置(例如,包括示例性陀螺仪架构100或其部分)的角速度的第二分量而迫使该两个外框陀螺仪(例如,包括GX验证质量块132、134、136、138等的GX或外框陀螺仪)进入反相位运动,例如,如本文所述。
示范性MEMS装置(例如,包括示范性陀螺仪架构100或其部分)的其它非限制性实施可包括耦合到MEMS装置(例如,包括示范性陀螺仪架构100或其部分)的应力隔离框(例如,应力隔离框308),并且配置为拒绝从与MEMS装置(例如,包括示例性陀螺仪结构100或其部分)相关联的封装传输到MEMS装置(例如,包括示例性陀螺仪结构100或其部分)的应力,例如,如本文进一步描述的。
鉴于以上描述的主题,可以根据针对本文描述的各个实施例的操作方法,根据各个组件的运动,驱动系统的致动,经历施加的角动量,对其进行感测等等,以及向各种制造步骤的制造方向的方法,以形成本文各种实施例的组成部分,从而实现各种方法。为了简化说明的目的,可以将这样的方法描述为一系列步骤,并且应当理解和认识到,基于对本文的实施例的检阅,本领域技术人员可以理解这样的图示或相应的描述,不受步骤顺序的限制,因为一些步骤可能以不同的顺序发生和/或与本文所描绘和/或描述的其它步骤同时发生。
上述内容包括本发明实施例的示例。虽然在本发明中为了说明的目的描述了具体的实施例和示例,但是如相关领域的技术人员所认识到的,在这些实施例和示例的范围内考虑的各种修改是可能的。当然,为了描述所要求保护的主题,不可能描述配置、组件和/或方法的每一个可想到的组合,但是应当理解,各种实施例的许多进一步组合和排列是可能的。因此,尽管已经根据所示的实施例描述了所公开的主题,但是本领域的普通技术人员将容易地认识到,实施例可能存在变化,并且这些变化将在所公开主题的精神和范围内。所以,本领域的普通技术人员可以在不脱离所公开主题的精神和范围的情况下进行许多修改。因此,要求保护的主题旨在包含落入所附权利要求书的精神和范围内的所有这些改变、修改和变化。
此外,本文中的词语“示例”或“示范性”是指用作示例、实例或说明。本文中描述为“示例性”的任何方面或设计不一定被解释为优选于或优于其它方面或设计。相反,使用“示范性”一词是为了以具体的方式呈现概念。在本申请书中,术语“或”意指包含的“或”,而不是排他性的“或”。也就是说,除非另有规定或上下文清楚,“X使用A或B”意指任何自然包含排列。也就是说,如果X使用A;X使用B;或者X同时使用A和B,那么在上述任一情况下,“X使用A或B”是满足的。此外,除非另有规定或从上下文中清楚地指示为单数形式,否则本申请中使用的条款“一”和“一个”以及所附权利要求通常应解释为意味着“一个或多个”。
此外,虽然一个方面可能仅针对几个实施例中的一个进行了公开,但是所述特征可以与其它实施例的一个或多个其它特征结合,这对于任何给定的或特定的应用来说是需要的和有利的。此外,在详细描述或权利要求书中使用术语“包括”、“包含”、“具有”、“含有”、其变体和其它类似词语的范围内,这些术语旨在以类似于术语“包括”的方式包含,作为开放过渡词,而不排除任何附加或其它元素。
- 驱动和感测平衡、全耦合3轴陀螺仪
- 驱动和感测平衡、半联接三轴陀螺仪