一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法
文献发布时间:2023-06-19 10:48:02
技术领域
本发明涉及钢铁生产过程信息化技术领域,具体是一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法。
背景技术
在炼钢生产中,钢水经过连铸辊道生产板坯,每生产一块板坯会对应生成一个板坯号码,号码中包含着这块板坯的信息;板坯会进过连铸辊道运输后,被天车吊入板坯库房中;然而,板坯在辊道上的运动速度,停留时间不固定,故不能在板坯起吊时准确得到对应的板坯信息;因此,需要利用计算机视觉方法对板坯在连铸辊道上进行跟踪。
发明内容
本发明的目的在于提供一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法,所述方法包括以下步骤:
步骤1:在辊道中心安装多个网络相机,以拍摄到整条连铸辊道;
步骤2:采集大量板坯图像数据,并标注板坯的坐标位置;
步骤3:使用标注好的数据集训练Yolov3模型,待到模型收敛后,得到一组网络权重;
步骤4:使用训练完成的网络模型,计算每帧图像中板坯的位置;
步骤5:将上位机给到的板坯号码队列,依次对应到图像检测到的板坯号;
步骤6:当板坯到达称重位置,或被吊入库房中,给出对应的板坯号。
优选的,使用基于计算机视觉的方法,不断检测图像中的板坯位置,完成目标跟踪。
优选的,使用卷积神经网络提取板坯图像的特征,并在特征图中选取适合的特征区域,作为识别的结果。
优选的,首先多块板坯的相对位置,在将上位机给到的板坯号,一一对应到图像中的每一块板坯。
优选的,实时获取两个拍摄图像,接着使用高斯平滑滤波器对图像去噪,并对图像做旋转裁剪,使得可以直观清晰观察到辊道的全部。
优选的,当板坯到达称重位置或被吊起入库时,将对应板坯号发送给下位机;进而完成对板坯的运动跟踪。
与现有技术相比,本发明的有益效果是:
1、使用计算机视觉技术实时检测跟踪板坯在辊道上的运动,并一一对应其板坯号码信息,使得板坯的信息在辊道运动过程中不会丢失;
2、解决了此前无法直到被吊板坯信息的问题,极大的推动了钢铁生产过程信息化的发展。
附图说明
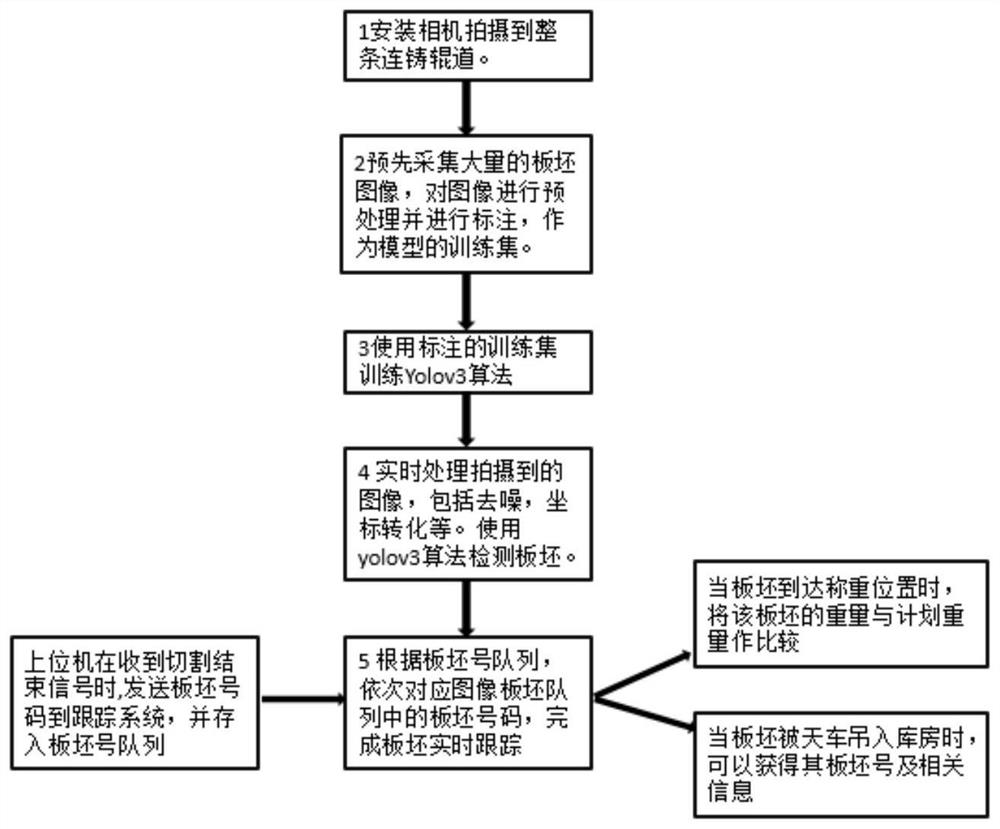
图1为本发明一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法的流程图;
图2为本发明一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法相机安装位置图;
图3为本发明一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法的图像处理流程及效果图;
图4为本发明一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法的Yolov3算法模型结构图;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法,方法包括以下步骤:
步骤1:在辊道中心安装两个相机,分别拍摄前后两段范围的辊道;
步骤2:实时获取两个相机的拍摄图像,接着使用高斯平滑滤波器对图像去噪,并对图像做旋转裁剪,使得可以直观清晰观察到辊道的全部;
步骤3:采集大量包含板坯得图像数据,使用Yolov3卷积神经网络模型训练;
步骤4:实时拍摄板坯图像,并对图像进行去噪,并进行坐标转化处理;然后使用训练好的模型检测板坯的位置,并估算其长度;最后将两幅图像结果结合在一起,合并重复区域;
步骤5:不断接收切割后板坯的号码,并加入到一个板坯队列;
步骤6:将板坯队列中的板坯号,按顺序分别对应到图像中检测的板坯;当板坯到达称重位置或被吊起入库时,将对应板坯号发送给下位机。进而完成对板坯的运动跟踪。
实施例1
本实施例将两个相机安装在板坯辊道中的位置,如图2所示;两个相机分别拍摄两个方向的板坯图像,这样可以将拍摄范围扩大到从板坯切割至板坯起吊。
安装好相机后,首先采集20000余张板坯图像数据;然后对图像进行预处理,包括:1.使用高斯平滑滤波器对图像进行去噪;2.把图像旋转至辊道水平,裁剪出辊道范围如图3中的S2步骤。接着使用标注工具labelImg对图像集进行标注,标注的类别只有1类“slab”,每一个标注的信息包括类别和对应像素框的“x”,“y”,“w”,“h”。
Yolov3网络会在提取图像特征后,在特征空间使用不同大小的锚点框对目标物进行搜索,因此需要先计算出不同锚点框的大小。本发明使用k-means聚类算法,重新计算出锚点框尺寸为:anchors=(7,15),(8,18),(9,19),(33,21),(43,54),(60,40),(81,71),(130,101),(242,159)。
实施例2
Yolov3算法使用darkNet53卷积神经网络作为特征提取的基础网络,darkNet53结构图如图4,Yolov3算法描述为:(1)首先按将图像划分为S*S固定的网格,如果目标中心落在对应网格,该网格负责这个目标的检测。(2)其中每个网格对落在网格中的B个物体进行分类,得到物体所属类别的概率,然后回归预测其位置信息;最后将位置坐标和类别概率整合为一串信息;(3)由于每个物体包含多个预测框,使用非极大值抑制算法,筛选出每个物体概率最高的边框;(4)最后网络的输出是每个网格的对应类别和位置信息。
Yolov3损失函数如下:
其中,网格一共是S*S个,每个网格产生B个候选框,最终会得到S*S*B个边界框。I_ij^obj表示第i个网格的第j个边界框,如果边界框负责目标物则为1,否则为0。
损失函数前两项为中心坐标误差和宽高坐标误差,两项坐标误差时为了表示预测框的坐标位置;x^,y^,w^,h^分别代表预测框的(x,y)坐标和宽高。
第三项和第四项时置信度误差,第三项是存在预测对象的候选框的置信度误差,第四项是不存在预测对象的候选框的置信度误差;C^表示预测框物体所代表的类别。
最后一项是分类误差,分类误差选择了交叉熵作为损失函数;p^表示预测类别的概率。
模型的训练过程,首先要求出算是函数的梯度,使用梯度下降法,按照学习了一步步迭代,直到损失趋于稳定,得到损失函数的最优解。
模型训练完成后,在用于检测板坯,在板坯运动的实时过程中,按照每秒1帧的速度不断地检测包含板坯的图像;检测效果如图3中的S3,可以清晰的检测到板坯的位置;之后,将板坯号码队列中的板坯号,从左到右依次赋给图像中检测出的板坯如图3中的S4。如此不断的检测、对应,达到一个板坯运动跟踪的效果。
当板坯到达称重位置时,可以获取称重重量,与计划重量做比对;当板坯到达入库位置时,可以确定入库的板坯号,进而对其进行物流跟踪。
虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
故以上所述仅为本申请的较佳实施例,并非用来限定本申请的实施范围;即凡依本申请的权利要求范围所做的各种等同变换,均为本申请权利要求的保护范围。
- 一种基于计算机视觉的板坯在连铸辊道上自动跟踪的方法
- 基于计算机视觉跟踪和传感器跟踪的跟踪方法和跟踪系统