一种螺栓自动检测方法及装置
文献发布时间:2023-06-19 10:48:02
技术领域
本发明涉及风电设施维护技术领域,尤其涉及一种螺栓自动检测方法及装置。
背景技术
由于风电机组中用于级间紧固连接的螺栓数量众多,根据风电机组《定检维护操作规程》,风电机组首次运行500小时后,所有螺栓预紧力必须接受全面检查,后续每年需定期抽检所有螺栓的10%-20%,抽检的工作了十分巨大,而风电机组的螺栓用于级间的紧固连接,螺栓松动或断裂是风电机组失效倒塌的主要原因,这对风电机组而言是非常致命的,级间紧固螺栓的定期检查是避免风电机组失效的关键。
目前,抽检工作主要是基于力矩检查,在现有技术中,一般采用液压力矩扳手对抽检螺栓进行人工打力矩测试,其工作量十分巨大,且对操作人员的技能和态度的要求很高;在所有抽检螺栓都无故障的理想情况下,这个环节的工作量占了整个定检工作量的一半,而如果在被抽检的螺栓中发现有一个力矩不够,则所有紧固螺栓必须进行100%全检和重新加载,在这种情况下,定检的工作量将增加数倍,打力矩工作的工作量占比将超过整个定检维护总量的90%,投入的人力成本十分巨大。
发明内容
根据现有技术中存在的问题,现提供一种螺栓自动检测方法及装置,旨在提供一种简单快速的螺栓检测方案,以节约人力资源,并在提高检测效率的同时降低总体的成本。
上述技术方案具体包括:
一种螺栓自动检测方法,用于对风电塔架上的风电机组螺栓进行检测,所述螺栓自动检测方法包括:
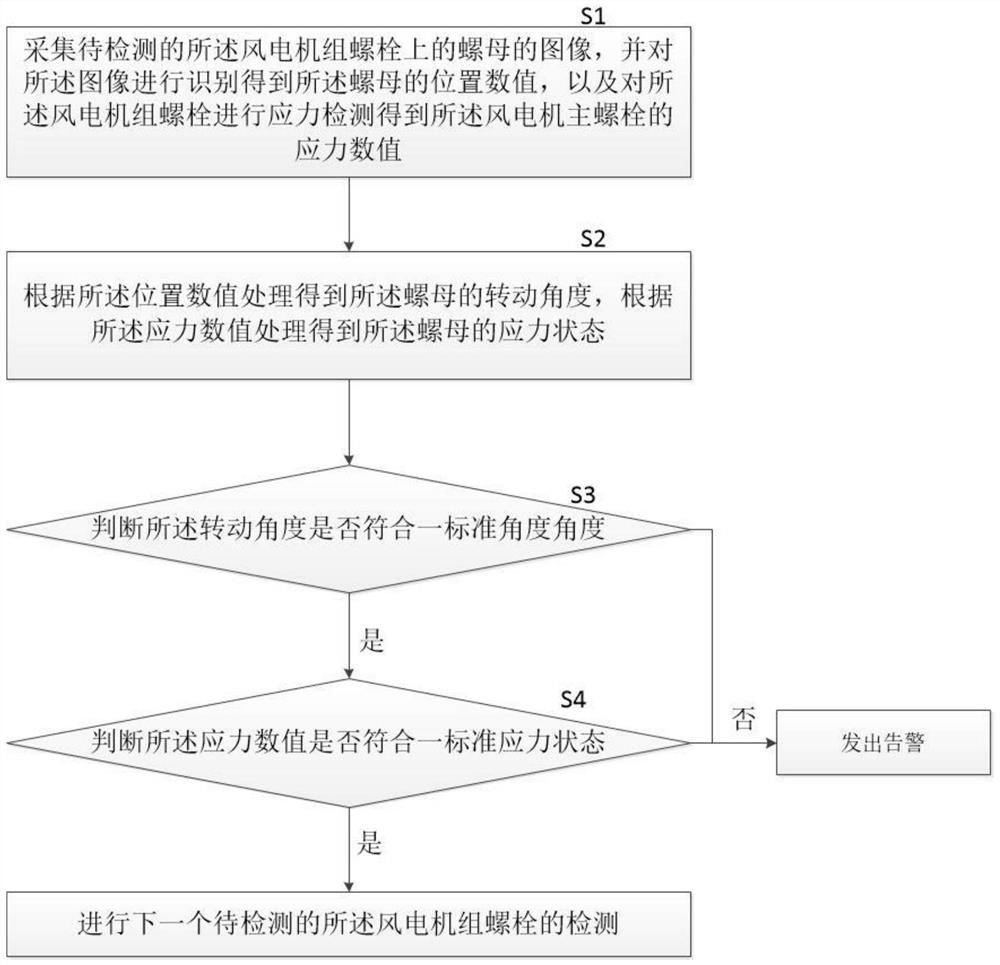
步骤S1、采集待检测的所述风电机组螺栓上的螺母的图像,并对所述图像进行识别得到所述螺母的位置数值,以及对所述风电机组螺栓进行应力检测得到所述风电机主螺栓的应力数值;
步骤S2、根据所述位置数值处理得到所述螺母的转动角度,根据所述应力数值处理得到所述螺母的应力状态;
步骤S3、判断所述转动角度是否符合一标准角度角度;
若是,则进行步骤S4;
若否,则发出告警;
步骤S4、判断所述应力数值是否符合一标准应力状态;
若是,则进行下一个待检测的所述风电机组螺栓的检测;
若否,则发出告警。
优选的,步骤S1中还包括一位置校正过程,包括:
步骤S11、判断所述位置数值是否符合一标准位置数值;
若是,则进行步骤S2;
若否,则进行步骤S12;
步骤S12、采集所述风电机组螺栓的多个位置的图像直到所述位置数值符合所述标准位置数值。
优选的,所述螺栓自动检测装置包括:
滑动平台,所述滑动平台放置于风电塔架的法兰平台上,并可沿所述风电机组螺栓的排列方向移动;
于所述滑动平台上固定安装一传感器装置,在所述滑动平台进行移动时,所述传感器装置对所述风电机组螺栓进行检测,所述传感器装置具体包括:
视觉检测模块,用于对单个所述风电机组螺栓进行视觉检测,以识别所述风电机组螺栓和位于所述风电机组螺栓上的螺母的位置数值;
应力检测模块,用于对单个所述风电机组螺栓进行应力检测,以检测得到所述风电机组螺栓受到的应力数值;
所述传感器装置还连接一处理系统,并用于将位置数值和应力数值打包发送至所述处理系统;
所述处理系统根据所述位置数值处理得到所述螺母的转动角度,以及根据所述应力数值处理得到所述风电机组螺栓的应力状态。
优选的,所述滑动平台包括:
环形滑轨,具有一下凹槽,所述下凹槽用于嵌入一链条;
安装平台,所述安装平台上具体设置有:
多个定位导轮,所述定位导轮嵌入于所述环形滑轨的上凹槽内,所述上凹槽设置于所述环形滑轨的两侧且位于所述下凹槽的上侧;
驱动链轮,所述驱动链轮与所述链条啮合连接;
驱动电机,固定设置于所述驱动链轮上,用于为所述驱动链轮提供动力,所述驱动链轮根据所述驱动电机提供的电力沿着所述链条进行移动,使得所述安装平台沿着所述环形滑轨进行移动。
优选的,所述传感器装置还包括:
直线模组,固定设置于所述安装平台表面上的一安装支架上,所述直线模组具有能够上下移动的一滑台;
所述应力检测模块和所述视觉检测模块固定安装于所述滑台上,且所述视觉检测模块位于所述应力检测模块的上侧。
优选的,所述应力检测模块包括:
第一驱动单元,固定安装于所述滑台上,具有一第一驱动轴,所述第一驱动单元用于绕着所述第一驱动轴转动以移动一应力传感器的位置;
所述应力传感器通过一第一连接件安装于所述第一驱动单元上,当所述传感器装置随着所述滑动平台移动至所述风电机组螺栓的预设检测位置时,应力传感器用于对所述风电机组螺栓进行应力检测得到所述应力数值。
优选的,所述视觉检测模块包括:
第二驱动单元,固定安装于所述滑台上,具有一第二驱动轴,所述第二驱动单元用于绕着所述第二驱动轴转动以移动一视觉传感器的位置;
所述视觉传感器通过一第二连接件安装于所述第二驱动单元上,当所述传感器装置随着所述滑动平台移动至所述风电机组螺栓的预设检测位置时,所述视觉传感器用于采集所述风电机组螺栓和所述螺母的当前图像并进行识别,以得到位置数值。
优选的,所述处理系统包括:
上位机,所述上位机连接至所述传感器装置,用于采集得到所述应力数值与所述位置数值,并对所述应力数值与所述位置数值进行处理;
发送装置,连接至所述上位机,用于将所述应力数值和所述位置数值发送给一外部的监测装置;
所述监测装置用于根据所述位置数值处理得到所述螺母的转动角度,以及根据所述应力数值处理得到所述风电机组螺栓的应力状态,并根据所述转动角度和所述应力状态判断所述风电机组螺栓是否出现问题。
优选的,所述上位机包括:
第一数据库,预存有与多个所述风电机组螺栓一一对应的标准位置数值;
第一采集单元,连接至所述传感器装置,用于采集得到所述应力数值和所述位置数值并进行存储;
第一比对单元,连接至所述第一采集单元和所述第一数据库,用于将所述风电机组螺栓的所述位置数值和所述标准位置数值进行比对,并输出一第一比对结果;
计算单元,连接至所述第一采集单元和所述第一比对单元,用于在所述第一比对结果表示所述风电机组螺栓的位置数值和所述标准位置数值不符合时,根据所述风电机组螺栓的所述位置数值进行计算,并输出一计算结果至一控制单元;
所述控制单元连接至所述滑动平台,用于根据所述计算结果控制所述传感器装置发生移动,直到所述第一比对结果表示所述风电机组螺栓的位置数值和所述标准位置数值符合;
输出单元,连接至所述第一比对单元,用于在所述第一比对结果表示所述风电机组螺栓的所述位置数值和所述标准位置数值符合时,将所述应力数值和所述位置数值通过所述发送装置发送给所述监测装置。
优选的,所述监测装置包括:
第二数据库,预存有与多个所述风电机组螺栓一一对应的标准应力状态,以及和所述螺母一一对应的标准转动角度;
第二采集单元,通过无线连接的方式连接至所述发送装置,用于接收所述应力数值和所述位置数值并进行储存;
第二比对单元,连接至所述第二数据库和所述第二采集单元,用于对所述螺母的位置数值进行处理得到所述螺母的转动角度,并将所述转动角度和所述标准转动角度进行比对,并输出一第二比对结果;
第三比对单元,连接至所述第二数据库和所述第二采集单元,用于对所述应力数值进行处理得到所述应力状态,并将所述应力状态与所述标准应力状态进行比对,并输出一第三比对结果;
告警单元,连接至所述第二比对单元和所述第三比对单元,预存有一告警动作,用于在所述第二比对结果表示所述转动角度与和所述标准转动角度不符合时,和/或所述第三比对结果表示所述应力状态与所述标准应力状态不符合时,执行所述告警动作以提示用户进行所述风电机组螺栓的检查或更换;
展示单元,连接至所述第二采集单元,用于将所述应力数值和所述位置数值展示给用户。
本发明的技术方案的有益效果在于:使用传感器技术定期对每个螺栓进行全自动在线实时检测,及时发现问题螺栓并进行报警以通知维护人员进行检查或更换,完全实现风电机组中螺栓故障的早期诊断和预警效果,大大减少了检测的人工投入,在避免人工进行力矩检测精度的不足的同时降低了总体的检测成本。
附图说明
参考所附附图,以更加充分的描述本发明的实施例。然而,所附附图仅用于说明和阐述,并不构成本发明范围的限制。
图1为本发明实施例的螺栓自动检测方法的系统流程示意图;
图2为本发明实施例的位置校正方法的系统流程示意图;
图3为本发明实施例的螺栓自动检测装置的具体实施结构示意图;
图4为本发明实施例的滑动平台的具体实施示意图;
图5为本发明实施例的传感器装置的具体实施示意图;
图6为本发明实施例的供电单元的具体实施示意图;
图7为本发明实施例的上位机的结构组成图;
图8为本发明实施例的监测装置的结构组成图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
如图1所示,本技术方案提供一种螺栓自动检测方法,用于对风电塔架上的风电机组螺栓进行检测,其中,包括:
步骤S1、采集待检测的风电机组螺栓101上的螺母103的图像,并对图像进行识别得到螺母103的位置数值,以及对风电机组螺栓进行应力检测得到所述风电机主螺栓的应力数值;
步骤S2、根据位置数值处理得到螺母103的转动角度,根据应力数值处理得到螺母103的应力状态;
步骤S3、判断转动角度是否符合一标准角度角度;
若是,则进行步骤S4;
若否,则发出告警;
步骤S4、判断应力数值是否符合一标准应力状态;
若是,则进行下一个待检测的风电机组螺栓101的检测;
若否,则发出告警。
在一种较优的实施例中,如图2所示,步骤S1中还包含一个位置校正过程,包括:
步骤S11、判断位置数值是否符合一标准位置数值;
若是,则进行步骤S2;
若否,则进行步骤S12;
步骤S12、采集所述风电机组螺栓的多个位置的图像直到位置数值符合标准位置数值。
如图3所示,本发明提供一种螺栓自动检测装置,用于对风电塔架10上的风电机组螺栓101进行检测;其中,包括:
滑动平台,滑动平台放置于风电塔架的法兰平台102上,并可沿风电机组螺栓101的排列方向移动;
于滑动平台上固定安装一传感器装置,在滑动平台进行移动时,传感器装置对风电机组螺栓101进行检测,传感器装置具体包括:
视觉检测模块,用于对单个风电机组螺栓101进行视觉检测,以识别风电机组螺栓101和位于风电机组螺栓上的螺母103的位置数值;
应力检测模块,用于对单个风电机组螺栓101进行应力检测,以检测得到风电机组螺栓101受到的应力数值;
传感器装置还连接一处理系统,并用于将位置数值和应力数值打包发送至处理系统;
处理系统根据位置数值处理得到螺母103的转动角度,以及根据应力数值处理得到风电机组螺栓101的应力状态。
具体的,螺母103通过风电机组螺栓101连接至风电塔架法兰102中。
在一种较优的实施例中,如图4所示,滑动平台包括:
环形滑轨1,具有一下凹槽11,下凹槽11用于嵌入一链条2;
安装平台3,安装平台3上具体设置有:
多个定位导轮31,定位导轮31嵌入于环形滑轨1的上凹槽12内,上凹槽12设置于环形滑轨1的两侧且位于下凹槽11的上侧;
驱动链轮32,驱动链轮32与链条2啮合连接;
驱动电机33,固定设置于驱动链轮32上,用于为驱动链轮32提供动力,驱动链轮32根据驱动电机33提供的电力沿着链条2进行位置的移动,使得安装平台3沿着环形滑轨1进行移动。
具体的,安装平台3的上表面具有一通孔,驱动电机33通过该通孔与安装平台3固定连接,当驱动电机33驱动驱动链轮32发生转动时,驱动链轮32沿着链条2进行位置的移动,同时带动驱动电机33与安装平台3进行移动。
具体的,定位导轮31用于定位和导向,支撑整个安装平台3,定位导轮31内配置滚动轴承,并能使安装平台3在上凹槽12上顺畅移动。
具体的,上凹槽12可以为V型槽,则定位导轮31也为V形,并对应嵌入上凹槽12,上凹槽12也可以用圆弧形,但圆弧形的上凹槽12的精度要求会比V形的上凹槽12高,V形结构定位效果好,能够支撑定位导轮31,不会使定位导轮31脱离上凹槽12外。
在一种较优的实施例中,如图5所示,传感器装置还包括:
直线模组4,固定设置于安装平台3表面上的一安装支架34上,直线模组4具有能够上下移动的一滑台41;
应力检测模块和视觉检测模块固定安装于滑台41上,且视觉检测模块位于应力检测模块的上侧。
在一种较优的实施例中,应力检测模块包括:
第一驱动单元5,固定安装于滑台41上,具有一第一驱动轴,第一驱动单元5用于绕着第一驱动轴转动以移动一应力传感器6的位置;
应力传感器6通过一第一连接件7安装于第一驱动单元5上,当传感器装置随着滑动平台移动至风电机组螺栓101的预设检测位置时,应力传感器6用于对风电机组螺栓101进行应力检测得到应力数值。
具体的,第一驱动单元5为应力传感器驱动器。
在一种较优的实施例中,视觉检测模块包括:
第二驱动单元8,固定安装于滑台41上,具有一第二驱动轴,第二驱动单元8用于绕着第二驱动轴转动以移动一视觉传感器9的位置;
视觉传感器9通过一第二连接件10安装于第二驱动单元8上,当传感器装置随着滑动平台移动至风电机组螺栓101的预设检测位置时,视觉传感器9用于采集螺母103的当前图像并进行识别,以得到位置数值。
具体的,第二驱动单元8为视觉传感器驱动器。
在一种较优的实施例中,如图3所示,处理系统包括:
上位机5,上位机5连接至传感器装置,用于采集得到应力数值与位置数值,并对应力数值与位置数值进行处理;
发送装置6,连接至上位机5,用于将应力数值和位置数值发送给一外部的监测装置7;
监测装置7用于根据位置数值处理得到螺母103的转动角度,以及根据应力数值处理得到风电机组螺栓101的应力状态,并根据转动角度和应力状态判断风电机组螺栓101是否出现问题。
具体的,发送装置6为一信号传输器,通过无线传输的方式将应力数值和位置数值传输给监测装置7。
具体的,监测装置7可以为一计算机。
在一种较优的实施例中,如图7所示,上位机5包括:
第一数据库51,预存有与多个风电机组螺栓101一一对应的标准位置数值;
第一采集单元52,连接至传感器装置,用于采集得到应力数值和位置数值并进行存储;
第一比对单元53,连接至第一采集单元52和第一数据库51,用于将风电机组螺栓101的位置数值和标准位置数值进行比对,并输出一第一比对结果;
计算单元54,连接至滑动平台、第一采集单元52和第一比对单元53,用于在第一比对结果表示风电机组螺栓101的位置数值和标准位置数值不符合时,根据风电机组螺栓101的位置数值进行计算,并输出一计算结果至一控制单元55;
控制单元55连接至滑动平台,用于根据计算结果控制传感器装置发生移动,直到第一比对结果表示风电机组螺栓101的位置数值和标准位置数值符合;
输出单元56,连接至第一比对单元53,用于在第一比对结果表示风电机组螺栓101的位置数值和标准位置数值符合时,将应力数值和位置数值通过发送装置6发送给监测装置7。
在一种较优的实施例中,如图8所示,监测装置7包括:
第二数据库71,预存有与多个风电机组螺栓101一一对应的标准应力状态,以及和螺母103一一对应的标准转动角度;
第二采集单元72,通过无线连接的方式连接至发送装置6,用于接收应力数值和位置数值并进行储存;
第二比对单元73,连接至第二数据库71和第二采集单元72,用于对螺母的位置数值进行处理得到螺母103的转动角度,并将转动角度与和标准转动角度进行比对,并输出一第二比对结果;
第三比对单元74,连接至第二数据库71和第二采集单元72,用于对应力数值进行处理得到应力状态,并将应力状态与标准应力状态进行比对,并输出一第三比对结果;
告警单元75,连接至第二比对单元73和第三比对单元74,预存有一告警动作,用于在第二比对结果表示转动角度与和标准转动角度不符合时,和/或第三比对结果表示应力状态与标准应力状态不符合时,执行告警动作以提示用户进行风电机组螺栓101的检查或更换;
展示单元76,连接至第二采集单元72,用于将应力数值和位置数值展示给用户。
具体的,本技术方案中还包括一供电模块8,供电模块8包括:
电源81、发射端线圈82、接收端线圈83和充电电池84;供电模块8用于采用电磁感应技术,对驱动电机33,上位机5,发送装置6供电。
本技术方案中的螺栓自动检测方法具体使用过程如下:
用户在监测装置7通过发送装置6向上位机5输出一检测信号,上位机5根据检测信号输出一控制信号至驱动电机33,驱动电机33根据控制信号驱动驱动链轮32发生转动,驱动链轮32沿着链条2移动一段预设的长度,同时带动驱动电机33与安装平台3进行移动。
具体的,驱动链轮32沿着链条2移动的预设的长度为根据风电塔架一般的螺栓的间隔距离决定的长度。
进一步的,步骤S1根据如下实施步骤实现,驱动电机33驱动结束后,输出一完成信号至上位机5,上位机5输出一拍摄信号至视觉传感器9,视觉传感器9根据拍摄信号进行拍摄并将拍摄的螺栓的图像传输会上位机5,上位机5对图像进行处理得到风电机组螺栓101与风电机组螺栓101上的螺母103的位置数值和螺栓的应力数值,
进一步地,步骤S11根据如下实施步骤实现:第一比对单元53将风电机组螺栓101的位置数值和标准位置数值进行比对,并判断是否符合;
若不符合,步骤S12根据如下实施步骤实现:则计算单元54根据风电机组螺栓101的位置数值和标准位置数值进行计算得到一计算结果,控制单元55根据计算结果控制第二驱动单元8和直线模组4移动视觉传感器9,直到风电机组螺栓101的位置数值符合标准位置数值;
控制单元55连接至滑动平台,用于根据计算结果控制传感器装置发生移动,直到第一比对结果表示风电机组螺栓101的位置数值和标准位置数值符合;
若符合,则输出单元56将应力数值和位置数值通过发送装置6发送给监测装置7,监测装置7中的展示单元76将应力数值和位置数值展示给用户。
进一步地,步骤S2根据如下实施步骤实现:监测装置7中的第二比对单元73对螺母103的位置数值进行处理得到螺母103的转动角度,并将转动角度与和标准转动角度进行比对并判断是否符合以实现步骤S3;监测装置7中的第三比对单元74对应力数值进行处理得到应力状态,并将应力状态与标准应力状态进行比对并判断是否符合以实现步骤S4。
若转动角度与和标准转动角度不符合时,和/或应力状态与标准应力状态不符合时,告警单元75执行告警动作以提示用户进行风电机组螺栓101的检查或更换;
若转动角度与和标准转动角度符合且应力状态与标准应力状态符合时,监测装置7通过发送装置6输出一符合信号至上位机5,上位机5根据符合信号输出一移动信号至驱动电机33,使得驱动电机33驱动根据以移动信号驱动驱动链轮32再次转动,驱动链轮32沿着链条2再次移动一段预设的长度以进行下一个风电机组螺栓101的检测。
本发明的技术方案的有益效果在于:使用传感器技术定期对每个螺栓进行全自动在线实时检测,及时发现问题螺栓并进行报警以通知维护人员进行检查或更换,完全实现风电机组中螺栓故障的早期诊断和预警效果,大大减少了检测的人工投入,在避免人工进行力矩检测精度的不足的同时降低了总体的检测成本。
以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
- 一种螺栓自动检测方法及装置
- 内六角螺栓尺寸自动检测装置及其检测方法