一种采空区场地高速铁路路基沉降监测装置及观测方法
文献发布时间:2023-06-19 10:49:34
技术领域
本发明涉及一种采空区场地高速铁路路基沉降监测装置及观测方法,属工程检测技术领域。
背景技术
我国拥有丰富的地下资源,在过去几十年间因开采造成的地面塌陷面积不断扩大。随着经济的快速发展,近年来我国高速铁路网已逐渐形成“四纵四横”规模,凭借惊人的发展速度以及过硬的实力,我国高铁已赢得国际社会高度认可。但由于地下资源开采大省诸多采空区的存在,使得高速铁路的规划普及变得困难,严重滞后了我国交通事业的发展。高铁动车机组对路基不均匀沉降又极为敏感,现行的轨道几何状态检测仪(轨检小车)只能在铁路运行窗口期对铁轨进行监测,条件限制较多且需要大量人工,虽然能保证一定精度但效率不高。而路基的不均匀沉降对动车组的安全运营极具威胁。
因此,找到一种适用于采空区场地高速铁路路基的沉降监测装置及方法迫在眉睫。
发明内容
本发明目的就在于克服上述不足,提供一种采空区场地高速铁路路基沉降监测装置及观测方法。
为实现上述目的,本发明是通过以下技术方案来实现:
一种采空区场地高速铁路路基沉降监测装置,包括激光信号接收墙、自动水准调节平台、激光发射端口A、激光发射端口B、电路接收模块板、激光接收器M、激光接收器N及微机接收控制系统,激光信号接收墙为横断为矩形,并铁路轴线平行分布的墙体结构,其下端面通过若干自动水准调节平台与铁路一侧的地平面连接,电路接收模块板共两个,并均与微机接收控制系统电气连接,其中一个电路接收模块板及激光接收器M嵌于激光信号接收墙前端面,并与水平面平行分布,激光接收器M与电路接收模块板电气连接,且激光接收器M光轴与激光信号接收墙轴线垂直分布,激光发射端口B至少一个,通过自动水准调节平台与铁路一侧的地平面连接,且激光发射端口B光轴与激光接收器M光轴平行分布,激光发射端口A、激光接收器N及另一个电路接收模块板均嵌于列车与激光信号接收墙相对分布的侧表面上,激光发射端口A、激光接收器N均与电路接收模块板电气连接,激光发射端口A、激光接收器N光轴与激光接收器M及激光发射端口B光轴平行分布,其中激光发射端口A光轴与激光接收器M光轴分布在同一与水平面平行分布的平面内,激光接收器N与激光发射端口B光轴分布在同一与水平面平行分布的平面内,微机接收控制系统共两个,两个微机接收控制系统间通过通讯网络连接,其中一个微机接收控制系统嵌于激光信号接收墙后端面,另一个微机接收控制系统嵌于列车内,其中位于激光信号接收墙处的微机接收控制系统另分别与各自动水准调节平台及激光发射端口B电气连接。
进一步的,所述的自动水准调节平台包括承载底座、升降驱动机构、三维转台、三维位移台、承载盘、定位夹具、光伏发电板、蓄电池组、位移传感器、角度传感器、倾角传感器及驱动电路,所述承载底座为轴向截面呈矩形的柱状腔体结构,所述蓄电池组及驱动电路均嵌于承载底座内,所述三维转台位于承载底座正上方并与承载底座同轴分布,所述三维转台下端面通过至少一个升降驱动机构与承载底座外表面连接,所述三维转台上端面通过三维位移台与承载盘连接,所述承载盘为横断面呈“凵”字形槽状结构,所述定位夹具与承载盘上端面连接并同轴分布,所述光伏发电板若干,分别包覆在承载盘上端面及承载底座外表面,所述位移传感器若干,分别位于升降驱动机构及三维位移台上,所述角度传感器、倾角传感器均至少一个,并分别与三维转台连接,所述升降驱动机构、三维转台、三维位移台、光伏发电板、蓄电池组、位移传感器、角度传感器、倾角传感器均与驱动电路电气连接,且所述驱动电路另与微机接收控制系统电气连接。
进一步的,所述的升降驱动机构为一个时,所述升降驱动机构与承载底座上端面连接并同轴分布;所述升降驱动机构为两个及两个以上时,各升降驱动机构环绕承载底座轴线均布,并与承载底座外表面连接,所述升降驱动机构为电动伸缩杆、气压伸缩杆、液压伸缩杆、丝杠机构、齿轮齿条机构及蜗轮蜗杆机构中的任意一种。
进一步的,所述的驱动电路为基于工业单片机的电路系统,并另设充放电控制电路。
进一步的,所述的激光信号接收墙及激光发射端口B与铁路外侧面间间距为5—10米,所述激光发射端口A位于列车首个转向架上方,车厢窗户下侧10cm处。
进一步的,所述的电路接收模块板为宽度为5-10cm,所述激光接收器M、激光接收器N均若干,并均布在各电路接收模块板前端面,且所述电路接收模块板后端面通过调节机构与激光信号接收墙滑动连接,并通过调节机构在竖直方向上进行0—50cm的位移。
进一步的,所述的调节机构包括直线驱动导轨、滑块、制动器、位移传感器,其中所述直线驱动导轨至少两条并相互平行分布,所述直线驱动导轨与激光信号接收墙轴线垂直分布,且每条直线驱动导轨均通过至少两个滑块与电路接收模块板后端面连接,所述滑块上另设一个制动器和一个位移传感器,所述制动器、位移传感器均与直线驱动导轨连接,所述直线驱动导轨、制动器、位移传感器另均与微机接收控制系统电气连接。
进一步的,所述的激光接收器M、激光接收器N外表面均设钢化玻璃保护面板。
进一步的,所述的微机接收控制系统为基于工业计算机、PC计算机及移动智能通讯终端中任意一种为基础的电路数据处理系统。
一种采空区场地高速铁路路基沉降监测装置的沉降观测方法,包括如下步骤:
S1,路基观测设备定位,根据采空区场地建设适宜性和地基稳定性评价,满足荷载条件下路基稳定要求,在规划线路的采空区沉降影响范围外选定激光接收墙起始位置,进行水准面布置,并固定架设定点激光发射器模块B,发射器模块安装完成后与动车组车身电路接收模块板中线位置等高;
S2,激光信号接收墙建设,在路基外5-10m不受列车动荷载影响范围内,开挖设置独立基础,基础完成后搭设激光接收墙,接收墙长度一直顺路基走向延伸,覆盖整个采空区影响范围长度;若场地设置独立基础条件有限,在激光接收墙与路基间设置隔震沟,受场地不均匀沉降影响时需保证墙体能保证竖直放置状态,并使微机接收控制系统与列车上的微机接收控制系统及远程监控平台建立数据连接;
S3,车身观测结构装配,在动车组车厢车窗下10cm的车身位置,内置车身通长宽度为5cm的激光接收器模块电路接收模块板Q,在动车组前端首个转向架对应车厢窗户上侧10cm车身位置,内置激光发射端口A,在列车内部控制激光发射,并使微机接收控制系统与激光信号接收墙上的微机接收控制系统及远程监控平台建立数据连接;
S4,沉降观测,列车运行至激光发射器模块B位置前,分别打开激光发射器模块A与B,通过激光接收器模块电路接收模块板记录列车行进过程中车身竖向位移情况,其中电路接收模块板Q反馈信号为进入采空区场地前车身行进过程中的竖向位移变化,判断动车组是否产生波磨;电路接收模块板P反馈信号为进入采空区场地后车身行进过程中的竖向位移变化,判断场地内路基是否产生了剩余变形引发的不均匀沉降,并可通过对应的传感器标号判别波磨位置及沉降发生位置
S5,沉降判断,若电路接收模块板P与Q反馈信号绘入可视化图形均为直线,说明场地内路基无剩余沉降变形,钢轨没有产生波磨,列车运营安全;若电路接收模块板P与Q反馈信号绘入可视化图形均为曲线且变化一致,说明场地内路基无剩余沉降变形,但钢轨产生了波磨,需适当运营维护;若电路接收模块板Q反馈信号为直线,P反馈信号为曲线且浮动范围在2mm/10m范围内,说明钢轨没有产生波磨,但场地内路基出现了剩余变形引发的不均匀沉降,需适当运营维护;若电路接收模块板Q反馈信号为直线,P反馈信号为曲线且浮动范围超过2mm/10m,说明钢轨没有产生波磨,但场地内路基出现了剩余变形引发的不均匀沉降,需立即预警并对采空区场地路段进行运营维护。
本发明具有的有益效果是:
(1)本发明所提供的适用于采空区场地高速铁路路基沉降监测装置及施工方法,利用激光发射角度小、测量精度高、测距远、结果稳定可靠的优点,耗费较小的成本代价实现采空区场地路基的沉降监测。
(2)本发明通过在场地内设置“道-车”双向激光发射接收模块,可得到列车实际精准运行轨迹,并通过微机控制端进行沉降监测可视化,根据编码位置实时对比场地内是否有不均匀沉降情况发生。
(3)通过双向激光传感器反馈信号综合判断列车是否正常运营并能在场地发生不均匀沉降后实时预警,进一步保障采空区、岩溶及湿陷性黄土等类似场地高速铁路运营的安全性。不仅使国家高铁线路网的规划发展更为便利,也凸显了“绿色矿山”的建设意义。
附图说明
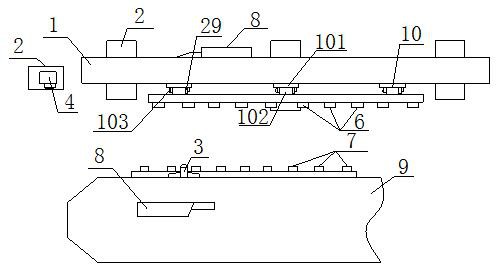
图1为本发明结构示意图;
图2为自动水准调节平台一种结构示意图;
图3为自动水准调节平台另一种结构示意图;
图4本发明观测方法流程示意图。
具体实施方式
如图1—3所示,一种采空区场地高速铁路路基沉降监测装置,包括激光信号接收墙1、自动水准调节平台2、激光发射端口A3、激光发射端口B4、电路接收模块板5、激光接收器M6、激光接收器N7及微机接收控制系统8,激光信号接收墙1为横断为矩形,并铁路轴线平行分布的墙体结构,其下端面通过若干自动水准调节平台2与铁路一侧的地平面连接,电路接收模块板5共两个,并均与微机接收控制系统8电气连接,其中一个电路接收模块板5及激光接收器M6嵌于激光信号接收墙1前端面,并与水平面平行分布,激光接收器M6与电路接收模块板5电气连接,且激光接收器M6光轴与激光信号接收墙1轴线垂直分布,激光发射端口B4至少一个,通过自动水准调节平台2与铁路一侧的地平面连接,且激光发射端口B4光轴与激光接收器M6光轴平行分布,激光发射端口A3、激光接收器N7及另一个电路接收模块板5均嵌于列车9与激光信号接收墙1相对分布的侧表面上,激光发射端口A3、激光接收器N7均与电路接收模块板5电气连接,激光发射端口A3、激光接收器N7光轴与激光接收器M6及激光发射端口B4光轴平行分布,其中激光发射端口A3光轴与激光接收器M6光轴分布在同一与水平面平行分布的平面内,激光接收器N7与激光发射端口B4光轴分布在同一与水平面平行分布的平面内,微机接收控制系统8共两个,两个微机接收控制系统8间通过通讯网络连接,其中一个微机接收控制系统8嵌于激光信号接收墙1后端面,另一个微机接收控制系统8嵌于列车9内,其中位于激光信号接收墙1处的微机接收控制系统8另分别与各自动水准调节平台2及激光发射端口B4电气连接。
需要特别说明的,所述的自动水准调节平台2包括承载底座21、升降驱动机构22、三维转台23、三维位移台24、承载盘25、定位夹具26、光伏发电板27、蓄电池组28、位移传感器29、角度传感器201、倾角传感器202及驱动电路203,所述承载底座21为轴向截面呈矩形的柱状腔体结构,所述蓄电池组28及驱动电路203均嵌于承载底座21内,所述三维转台23位于承载底座21正上方并与承载底座21同轴分布,所述三维转台23下端面通过至少一个升降驱动机构22与承载底座21外表面连接,所述三维转台23上端面通过三维位移台24与承载盘25连接,所述承载盘25为横断面呈“凵”字形槽状结构,所述定位夹具26与承载盘25上端面连接并同轴分布,所述光伏发电板27若干,分别包覆在承载盘25上端面及承载底座21外表面,所述位移传感器29若干,分别位于升降驱动机构22及三维位移台24上,所述角度传感器201、倾角传感器202均至少一个,并分别与三维转台23连接,所述升降驱动机构22、三维转台23、三维位移台24、光伏发电板27、蓄电池组28、位移传感器29、角度传感器201、倾角传感器202均与驱动电路203电气连接,且所述驱动电路203另与微机接收控制系统8电气连接。
值得注意的,所述的升降驱动机构22为一个时,所述升降驱动机构22与承载底座21上端面连接并同轴分布;所述升降驱动机构22为两个及两个以上时,各升降驱动机构22环绕承载底座21轴线均布,并与承载底座21外表面连接,所述升降驱动机构22为电动伸缩杆、气压伸缩杆、液压伸缩杆、丝杠机构、齿轮齿条机构及蜗轮蜗杆机构中的任意一种。
同时,所述光伏发电板27与承载底座21、升承载盘25间通过导向滑轨204滑动连接,所述导向滑轨204与承载底座21、升承载盘25间通过铰链机构205铰接。
本实施例中,所述的驱动电路203为基于工业单片机的电路系统,并另设充放电控制电路。
值得注意的,所述的激光信号接收墙1及激光发射端口B4与铁路外侧面间间距为5—10米,所述激光发射端口A3位于列车9首个转向架上方,车厢窗户下侧10cm处。
除此之外,所述的电路接收模块板5为宽度为5-10cm,所述激光接收器M6、激光接收器N7均若干,并均布在各电路接收模块板5前端面,且所述电路接收模块板5后端面通过调节机构10与激光信号接收墙1滑动连接,并通过调节机构10在竖直方向上进行0—50cm的位移。
本实施例中,所述的调节机构10包括直线驱动导轨101、滑块102、制动器103、位移传感器29,其中所述直线驱动导轨101至少两条并相互平行分布,所述直线驱动导轨101与激光信号接收墙1轴线垂直分布,且每条直线驱动导轨101均通过至少两个滑块102与电路接收模块板5后端面连接,所述滑块102上另设一个制动器103和一个位移传感器29,所述制动器103、位移传感器29均与直线驱动导轨101连接,所述直线驱动导轨101、制动器103、位移传感器29另均与微机接收控制系统8电气连接。
进一步优化的,所述的激光接收器M、激光接收器N外表面均设钢化玻璃保护面板。
进一步优化的,所述的微机接收控制系统为基于工业计算机、PC计算机及移动智能通讯终端中任意一种为基础的电路数据处理系统。
如图4所示,一种采空区场地高速铁路路基沉降监测装置的沉降观测方法,包括如下步骤:
S1,路基观测设备定位,根据采空区场地建设适宜性和地基稳定性评价,满足荷载条件下路基稳定要求,在规划线路的采空区沉降影响范围外选定激光接收墙起始位置,进行水准面布置,并固定架设定点激光发射器模块B,发射器模块安装完成后与动车组车身电路接收模块板中线位置等高;
S2,激光信号接收墙建设,在路基外5-10m不受列车动荷载影响范围内,开挖设置独立基础,基础完成后搭设激光接收墙,接收墙长度一直顺路基走向延伸,覆盖整个采空区影响范围长度;若场地设置独立基础条件有限,在激光接收墙与路基间设置隔震沟,受场地不均匀沉降影响时需保证墙体能保证竖直放置状态,并使微机接收控制系统与列车上的微机接收控制系统及远程监控平台建立数据连接;
S3,车身观测结构装配,在动车组车厢车窗下10cm的车身位置,内置车身通长宽度为5cm的激光接收器模块电路接收模块板Q,在动车组前端首个转向架对应车厢窗户上侧10cm车身位置,内置激光发射端口A,在列车内部控制激光发射,并使微机接收控制系统与激光信号接收墙上的微机接收控制系统及远程监控平台建立数据连接;
S4,沉降观测,列车运行至激光发射器模块B位置前,分别打开激光发射器模块A与B,通过激光接收器模块电路接收模块板记录列车行进过程中车身竖向位移情况,其中电路接收模块板Q反馈信号为进入采空区场地前车身行进过程中的竖向位移变化,判断动车组是否产生波磨;电路接收模块板P反馈信号为进入采空区场地后车身行进过程中的竖向位移变化,判断场地内路基是否产生了剩余变形引发的不均匀沉降,并可通过对应的传感器标号判别波磨位置及沉降发生位置
S5,沉降判断,若电路接收模块板P与Q反馈信号绘入可视化图形均为直线,说明场地内路基无剩余沉降变形,钢轨没有产生波磨,列车运营安全;若电路接收模块板P与Q反馈信号绘入可视化图形均为曲线且变化一致,说明场地内路基无剩余沉降变形,但钢轨产生了波磨,需适当运营维护;若电路接收模块板Q反馈信号为直线,P反馈信号为曲线且浮动范围在2mm/10m范围内,说明钢轨没有产生波磨,但场地内路基出现了剩余变形引发的不均匀沉降,需适当运营维护;若电路接收模块板Q反馈信号为直线,P反馈信号为曲线且浮动范围超过2mm/10m,说明钢轨没有产生波磨,但场地内路基出现了剩余变形引发的不均匀沉降,需立即预警并对采空区场地路段进行运营维护。
本发明具有的有益效果是:
(1)本发明所提供的适用于采空区场地高速铁路路基沉降监测装置及施工方法,利用激光发射角度小、测量精度高、测距远、结果稳定可靠的优点,耗费较小的成本代价实现采空区场地路基的沉降监测。
(2)本发明通过在场地内设置“道-车”双向激光发射接收模块,可得到列车实际精准运行轨迹,并通过微机控制端进行沉降监测可视化,根据编码位置实时对比场地内是否有不均匀沉降情况发生。
(3)通过双向激光传感器反馈信号综合判断列车是否正常运营并能在场地发生不均匀沉降后实时预警,进一步保障采空区、岩溶及湿陷性黄土等类似场地高速铁路运营的安全性。不仅使国家高铁线路网的规划发展更为便利,也凸显了“绿色矿山”的建设意义。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种采空区场地高速铁路路基沉降监测装置及观测方法
- 一种适用于采空区场地高速铁路路基结构