固定翼飞行器辅助垂直起降方法及装置
文献发布时间:2023-06-19 10:49:34
技术领域
本发明涉及一种固定翼飞行器辅助垂直起降方法及装置。
背景技术
随着飞行器技术的不断发展,无论是军事领域还是民用领域对飞行器的性能要求都越来越高。当今军事要求的一个重要能力就是能够快速转移作战部队及军事装备。常规固定翼飞机飞行速度快、巡航距离远、能够实现部队的快速转移,但是常规固定翼飞机对起飞条件及降落条件要求较高,因此在复杂地形环境下军方大多牺牲部队转移速度、采用低速直升机或地面车辆的方案。
为了兼顾上述飞行器的优点,旋翼固定翼复合式飞行器的概念被提出,其中的代表有倾转旋翼机、垂直起降固定翼飞机等,此类飞行器融合了旋翼机和固定翼飞机的特点,既具有旋翼机可垂直起降、飞行灵活、自由度高、空中悬停等优点,又兼具了固定翼飞行器续航时间久、巡航距离长、飞行速度快等特点。
然而,由于旋翼固定翼复合飞行器结构特点决定了其需要更多附属机械结构,这些冗余操作面及其附属的执行机构增加了飞行器自身的重量,从而减少了飞行器的航时和航程,此外,旋翼固定翼复合飞行器在固定翼模式巡航飞行时全程携带其垂起动力系统和结构,此类重量在巡航飞行时属于无效载荷,其带来的阻力也不容忽视,导致此类飞行器带负载能力弱、飞行效率低。
发明内容
本发明所要解决的技术问题在于克服现有技术不足,提供一种固定翼飞行器辅助垂直起降方法,可以在不降低固定翼飞行器载荷、飞行性能及不改变固定翼飞行器气动布局的前提下,经过适当的微小改装,实现固定翼飞行器在无滑跑跑道情况下的起降问题。
本发明具体采用以下技术方案解决上述技术问题:
一种固定翼飞行器辅助垂直起降方法,在起飞阶段,使用旋翼飞行器携载所述固定翼飞行器垂直起飞,起飞达到预定高度后旋翼飞行器与固定翼飞行器分离;以及/或者,在降落阶段,先使用旋翼飞行器与所述固定翼飞行器空中对接,然后利用旋翼飞行器携载所述固定翼飞行器垂直降落。
优选地,旋翼飞行器通过设置于其底部的投放器与设置在所述固定翼飞行器顶部的分离板相配合,实现携载所述固定翼飞行器垂直起飞并在起飞达到预定高度后与固定翼飞行器分离。
优选地,旋翼飞行器通过设置于其顶部的可折叠支撑机构与设置在所述固定翼飞行器底部的闭合机构相配合,实现与所述固定翼飞行器空中对接,并携载所述固定翼飞行器垂直降落。
基于同一发明构思还可以得到以下技术方案:
一种固定翼飞行器辅助垂直起降装置,该装置为旋翼飞行器;所述旋翼飞行器具有辅助起飞机构和/或辅助降落机构,所述辅助起飞机构用于携载所述固定翼飞行器垂直起飞并在起飞达到预定高度后与固定翼飞行器分离,所述辅助降落机构用于与所述固定翼飞行器空中对接,并携载所述固定翼飞行器垂直降落。
优选地,所述辅助起飞机构为设置于旋翼飞行器底部的投放器,用于与设置在所述固定翼飞行器顶部的分离板相配合,实现携载所述固定翼飞行器垂直起飞并在起飞达到预定高度后与固定翼飞行器分离。
进一步优选地,所述投放器包括:紧固于旋翼飞行器底部的舵机安装架101,安装于舵机安装架101上的舵机102,开口向下地紧固于旋翼飞行器底部的U型槽固定架106;舵机102的舵机摇臂103与连杆104的一端铰接,连杆104的另一端铰接有锁杆105,锁杆105可在舵机102的驱动下通过U型槽固定架106两侧的通孔将U型槽固定架106的开口打开或锁死。
优选地,所述辅助降落机构为设置于旋翼飞行器顶部的可折叠支撑机构,用于与设置在所述固定翼飞行器底部的闭合机构相配合,实现与所述固定翼飞行器空中对接,并携载所述固定翼飞行器垂直降落。
进一步优选地,所述闭合机构包括通过舵机安装架211安装于固定翼飞行器底部的舵机212,舵机212的舵机摇臂213与连杆214的一端铰接,连杆214的另一端铰接有咬合杆215,咬合杆215的末端安装有与舵机212电气连接的长柄拨钮开关216,长柄拨钮开关216的长柄上绑有柔性绳217,柔性绳217的另一端系在固定翼飞行器底部。
更进一步优选地,咬合杆215朝向柔性绳217一侧的端部设置有锯齿结构。
进一步优选地,所述可折叠支撑机构包括通过舵机安装架115安装于旋翼飞行器顶部的舵机117以及以螺丝连接的方式紧固在旋翼飞行器顶部的飞机支撑架119,舵机117的舵机摇臂118与连杆116铰接,连杆116与撞绳导杆安装架113铰接,撞绳导杆安装架113末端的通孔中插入撞绳导杆111,二者通过胶接焊死,撞绳导杆安装架113与舵机安装架115以铰接形式对接,并在二者的对接孔内插入支撑杆112。
相比现有技术,本发明技术方案具有以下有益效果:
本发明利用旋翼飞行器辅助固定翼飞行器垂直起飞,起飞达到预定高度后旋翼飞行器分离,固定翼飞行器按照航线自主飞行,准备降落时旋翼飞行器与固定翼飞行器进行对接,利用旋翼飞行器辅助固定翼飞行器完成垂直降落。据此方法可以在不降低固定翼飞行器载荷、飞行性能及不改变固定翼飞行器气动布局的前提下,经过适当的微小改装,实现固定翼飞行器在无滑跑跑道情况下的起降问题,使固定翼飞行器在设计方面可以更关注于其飞行性能本身,同时还为固定翼飞行器在垂直起降方面提供了一套行之有效的方法。
附图说明
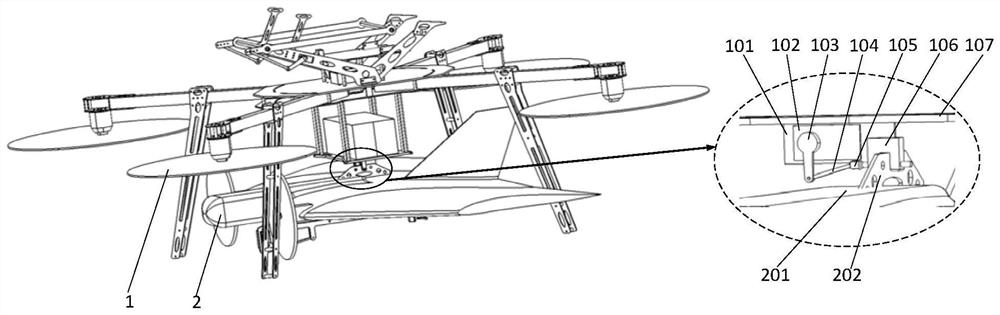
图1为辅助垂直起飞过程的结构及原理示意图;
图2为辅助垂直降落过程中空中对接前的结构及原理示意图;
图3为辅助垂直降落过程中空中对接后的结构及原理示意图。
图中包含以下附图标记:
1、旋翼无人机,2、固定翼无人机,101、舵机安装架,102、舵机,103、舵机摇臂,104、连杆,105、锁杆,106、U型槽固定架,107、电池安装架,111、撞绳导杆,112、支撑杆,113、撞绳导杆安装架,114、止动固定环,115、舵机安装架,116、连杆,117、舵机,118、舵机摇臂,119、飞机支撑架,201、固定翼背板,202、分离板,211、舵机安装架,212、舵机,213、舵机摇臂,214、连杆,215、咬合杆,216、长柄拨钮开关,217、柔性绳。
具体实施方式
针对现有技术不足,本发明的解决思路是利用旋翼飞行器辅助固定翼飞行器进行垂直起飞和/或垂直降落;旋翼飞行器携带固定翼飞行器垂直起飞后双机分离,固定翼飞行器可以高效率的执行巡航任务,旋翼飞行器可以降落待命或执行其它任务;固定翼飞行器需要降落时,利用旋翼飞行器对固定翼飞行器进行精准的对接捕获,约束固定后形成组合体进行垂直降落。
本发明所提出的固定翼飞行器辅助垂直起降方法,具体如下:在起飞阶段,使用旋翼飞行器携载所述固定翼飞行器垂直起飞,起飞达到预定高度后旋翼飞行器与固定翼飞行器分离;以及/或者,在降落阶段,先使用旋翼飞行器与所述固定翼飞行器空中对接,然后利用旋翼飞行器携载所述固定翼飞行器垂直降落。
本发明所提出的固定翼飞行器辅助垂直起降装置为旋翼飞行器;所述旋翼飞行器具有辅助起飞机构和/或辅助降落机构,所述辅助起飞机构用于携载所述固定翼飞行器垂直起飞并在起飞达到预定高度后与固定翼飞行器分离,所述辅助降落机构用于与所述固定翼飞行器空中对接,并携载所述固定翼飞行器垂直降落。
为了便于公众理解,下面通过一个具体实施例,并结合附图来对本发明的技术方案进行详细说明:
本实施例是以旋翼无人机辅助固定翼无人机垂直起飞和降落。该旋翼无人机同时具备辅助起飞机构和辅助降落机构,本实施例中,所述辅助起飞机构为设置于旋翼飞行器底部的投放器,用于与设置在所述固定翼飞行器顶部的分离板相配合,实现携载所述固定翼飞行器垂直起飞并在起飞达到预定高度后与固定翼飞行器分离;所述辅助降落机构为设置于旋翼飞行器顶部的可折叠支撑机构,用于与设置在所述固定翼飞行器底部的闭合机构相配合,实现与所述固定翼飞行器空中对接,并携载所述固定翼飞行器垂直降落。
如图1所示,所述投放器包括:紧固于旋翼无人机1底部的舵机安装架101,安装于舵机安装架101上的舵机102,开口向下地紧固于旋翼飞行器1底部的U型槽固定架106;舵机102的舵机摇臂103与连杆104的一端铰接,连杆104的另一端铰接有锁杆105,锁杆105可在舵机102的驱动下通过U型槽固定架106两侧的通孔将U型槽固定架106的开口打开或锁死;起飞前,将较接于固定翼无人机2背部201的分离板202锁在U型槽固定架106的内部滑槽中,滑槽底部同分离板202顶部紧密贴合,将锁杆105锁死后,旋翼无人机1和固定翼无人机2构成一个统一的升空整体。
升空过程中将固定翼无人机2挂载在旋翼无人机1腹部的电池安装架107之下,此时旋翼无人机1和固定翼无人机2组合成为统一的整体,旋翼无人机1为该整体系统提供升空动力,带动固定翼无人机2执行垂直升空任务。当固定翼无人机2被送入预定空域后,旋翼无人机1空中悬停,待确认整体飞行姿态维持稳定后,舵机102将在旋翼无人机1的控制下执行脱离动作,具体为:舵机102驱动舵机摇臂103做顺时针转动,舵机摇臂103带动连杆104和锁杆105共同向左移动,使得安装在固定翼无人机2顶部的分离板202从卡槽106中脱开,脱开瞬间,旋翼无人机1瞬间加速上升,保持与固定翼无人机2之间的安全距离,固定翼无人机2自带的机载控制设备进入工作状态,开始控制固定翼无人机2执行其巡航任务,至此,辅助升空任务完成。
如图2所示,所述闭合机构包括通过舵机安装架211安装于固定翼飞行器底部的舵机212,舵机212的舵机摇臂213与连杆214的一端铰接,连杆214的另一端铰接有咬合杆215,咬合杆215的末端安装有与舵机212电气连接的长柄拨钮开关216,长柄拨钮开关216的长柄上绑有柔性绳217,柔性绳217的另一端系在固定翼飞行器底部舵机安装架211右侧偏末端位置的通孔上;为了使得空中对接更稳固,咬合杆215朝向柔性绳217一侧的端部设置有锯齿结构。
如图2所示,所述可折叠支撑机构整体安装于旋翼飞行器顶部,包括通过舵机安装架115安装于旋翼飞行器顶部的舵机117以及紧固在旋翼飞行器顶部的飞机支撑架119,舵机117的舵机摇臂118与连杆116铰接,连杆116与撞绳导杆安装架113铰接,撞绳导杆安装架113末端的通孔中插入撞绳导杆111,二者通过胶接焊死,撞绳导杆安装架113与舵机安装架115以铰接形式对接,并在二者的对接孔内插入支撑杆112;为防止支撑杆112在轴向串动,在舵机支撑架115内侧和支撑杆112末端胶接止动固定环114;飞机支撑架119以螺丝连接的方式紧固在舵机安装架115右侧的末端,并在螺纹孔内注入螺纹胶。
空中对接过程将由安装于固定翼无人机2腹部的闭合机构和安装于旋翼无人机1顶部的可折叠机构共同配合完成,整个空中对接过程分四步完成:
1)闭合机构打开:闭合机构初始状态为闭合态。固定翼无人机2对接时,舵机212带动舵机摇臂213做顺时针转动,连杆214和自制咬合杆215在舵机212的带动下张开锯齿,并将线绳217拉至绷紧状态;
2)可折叠机构张开:可折叠机构初始状态为折叠态。当旋翼无人机1与固定翼无人机2准备进行空中对接时,舵机117驱动舵机摇臂118做逆时针转动,带动连杆116和撞绳导杆安装架113由折叠态转为张开态,撞绳导杆111被送入预定位置,准备撞绳;
3)姿态调整:固定翼无人机2飞入预定对接空域,并调整其俯仰角不断增大,以减小固定翼无人机2在水平方向的分速度,同时将线绳217置于较好的撞击角度;旋翼无人机1则瞬间加速,带动撞绳导杆111撞击线绳217;
4)撞绳捕获:撞绳导杆111撞击到线绳217的瞬间,拨钮开关216在线绳217的带动下触发,自制咬合杆215将在舵机212的驱动下迅速闭合,完成固定翼无人机2的空中捕获。
空中捕获完成后,将按图3给出的方式将固定翼无人机2和旋翼无人机1进行固联,使得二者组成一个垂直下降的整体,在旋翼无人机1的带动下,将整体安全送回返航点。具体地说,空中捕获完成后,舵机117驱动舵机摇臂118做顺时针旋转,驱动连杆116和撞绳导杆安装架113回到最初的折叠态,此时飞机支撑架119将固定翼无人机2腹部稳稳的抵住,固定翼无人机2和旋翼无人机1形成一个稳定的垂直降落整体进行降落返航。
所述舵机应能够被地面遥控器开关控制,如起飞时控制机构闭合、准备对接时展开机构、对接完毕降落后展开机构取下飞机等场景,都需要地面端能够直接控制机构。
所述拨钮开关为触发开关,旋翼无人机撞绳后触发开关被拨动,对接机构要立即闭合。
所述旋翼无人机的脚架要高于固定翼无人机的最大高度,保证辅助垂直起飞前,挂载于旋翼无人机腹部的固定翼无人机不会触地;旋翼无人机的旋翼和电机安装于朝地面的方向,保证空中对接时旋翼和固定翼无人机不会发生碰撞。
所述撞绳导杆和撞绳导杆支撑架最好用AB胶胶接,所有承力构件处螺丝均打螺丝胶。
- 固定翼飞行器辅助垂直起降方法及装置
- 一种可驮载固定翼飞机垂直起降的飞行器、驮载方法、垂直起飞的方法及垂直降落的方法