弓托式打草头、打草模块及打草无人车
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及牵引式打草机领域,具体而言,涉及一种弓托式打草头、具有该弓托式打草头的打草模块以及具有该打草模块的打草无人车。
背景技术
现有技术中,容易出现打草机在形貌复杂的起伏地块工作过程中,打草及通过角度难以适应实时地形起伏的变化,容易出现被起伏的地块卡住或撞击打草头,而影响通过性和打草头的可靠性。
目前,还没有能随实时地形调节打草及通过角度,并且具备自我防护的牵引式打草头,也没有具有该打草头并且便于无人车牵引智能控制的打草模块及具有该打草模块的无人车。
发明内容
本发明的目的是提供一种便于牵引及智能化控制、打草高度可调、能随实时地形起伏调整接近合理打草及通过角度、打草头能自我防护、简单可靠的一种弓托式打草头、具有该弓托式打草头的打草模块以及具有该打草模块的打草无人车。
为了实现上述目的,本发明的实施例提供了一种弓托式打草头,其包括电动机、打草头和多接头弓托,所述多接头弓托的一端可拆卸连接在电动机外壳上,所述电动机的转轴的一端与打草头固定连接。
优选地,所述多接头弓托是在弓托本体的一端设有带紧固件的电机接头,并且在靠近电机接头的一段弓托本体上设有至少一个轴接耳座构成。
优选地,所述轴接耳座上还设有第一链轮,第一链轮的一面固定连接在轴接耳座的一面上,并且第一链轮的中心孔与轴接耳座上的一个孔同心。
本发明的实施例还提供了一种打草模块,其包括牵引架和上述的弓托式打草头,所述弓托式打草头通过轴接耳座上的孔由轴铰接在牵引架的一端。
优选地,所述牵引架是由拖车连接器的一端连接在架本体的中部构成。
优选地,所述架本体上还设有L形行走架,L形行走架包括L形支架、万向轮和弹簧插销,所述L形支架的中部孔通过轴活动连接在架本体上,所述万向轮连接在L形支架的一端,所述弹簧插销连接在L形支架的另一端和万向轮所在端。
优选地,所述牵引架包括高低位多孔连接件、长连杆和短连杆,所述长连杆和短连杆的数量相等,所述高低位多孔连接件上部的孔通过轴与长连杆的一端铰接,下部的孔通过轴与短连杆的一端铰接,长连杆的另一端可通过轴与轴接耳座上端的孔连接,短连杆的另一端可通过轴与轴接耳座下端的孔连接。
优选地,牵引架由双端连杆的一端与拖车连接器之间通过轴铰接构成。
优选地,所述牵引架上还设有带链条的第二链轮,第二链轮的一面固定连接在拖车连接器上,链条用于连接牵引架上的第二链轮和轴接耳座上的第一链轮。
本发明的实施例还提供了一种打草无人车,其包括无人车和上述的打草模块,所述打草模块通过牵引架的一端活动连接在无人车的后面,并且打草模块上的弓托式打草头的电动机通过导线与无人车上的供电模块连接。
由于采取了以上技术方案,本发明的优点在于:
1.本发明的打草头可以随其下方多接头弓托所处的实时地形的起伏,调整打草角度,打草高度一致性更好;
2.本发明可调整电动机与多接头弓托的连接位置,从而实现打草高度的调节;
3.本发明的打草头连接在多接头弓托的上方,进行打草作业,在多接头弓托的调整和保护下,不容易出现被起伏的地块卡住或撞击打草头,通过性、可靠耐用性更好;
4.本发明无复杂的传动结构、简单可靠,模块化设计通过简单铰接和导线连接无人车的供电模块即可实现打草作业的智能控制。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
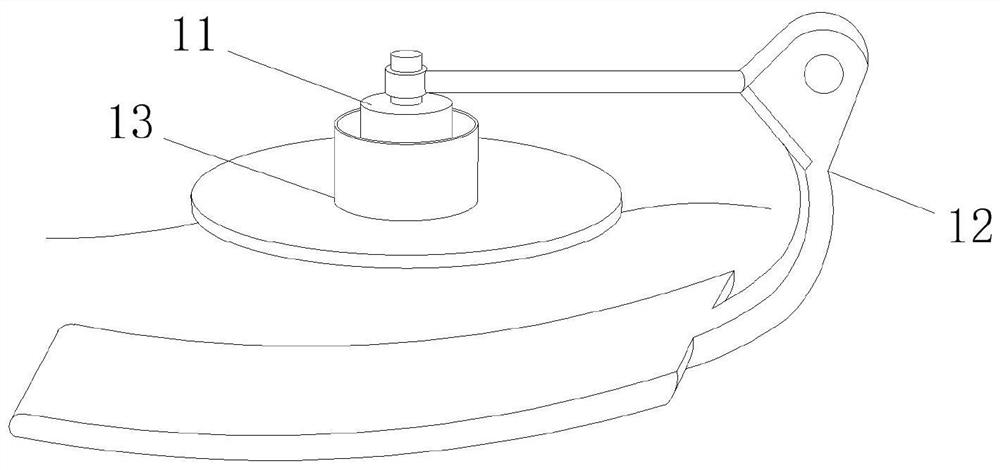
图1为本发明实施例提供的弓托式打草头示例1的结构示意图;
图2为本发明实施例提供的弓托式打草头示例2的侧视示意图;
图3为本发明实施例提供的弓托式打草头示例3的侧视示意图;
图4为本发明实施例提供的弓托式打草头示例4的侧视示意图;
图5为本发明实施例提供的多接头弓托示例1的结构示意图;
图6为本发明实施例提供的多接头弓托示例2的结构示意图;
图7为本发明实施例提供的多接头弓托示例3的结构示意图;
图8为本发明实施例提供的多接头弓托示例4的结构示意图;
图9为本发明实施例提供的打草模块示例1的结构示意图;
图10为本发明实施例提供的打草模块示例2的结构示意图;
图11为本发明实施例提供的L形行走架的结构示意图;
图12为本发明实施例提供的打草模块示例3的结构示意图;
图13为本发明实施例提供的打草模块示例4的结构示意图;
图14为本发明实施例提供的打草模块示例5的结构示意图;
图15为本发明实施例提供的打草模块示例5的侧视示意图;
图16为本发明实施例提供的打草模块示例6的侧视示意图;
图17为本发明实施例提供的打草无人车的结构示意图;
图18为本发明实施例提供的打草模块被无人车牵引通过起伏地面时的状态变化示意图。
图中:100、打草模块;10、弓托式打草头;11、电动机;12、多接头弓托;121、弓托本体;122、轴接耳座;123、电机接头;124、紧固件;125、第一链轮;13、打草头;20、牵引架;21、架本体;22、拖车连接器;23、双端连杆;24、链条;25、第二链轮;26、长连杆;27、短连杆;28、高低位多孔连接件;29、L形行走架;291、L形支架;292、万向轮;293、弹簧插销;30、轴;40、孔;50、供电模块;200、无人车;300、导线。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
需要说明的是,在不冲突的情况下,本发明的实施例中的特征可以相互结合。
参见图1、图2、图3、图4,本发明公开了一种弓托式打草头10,其包括电动机11、打草头13和多接头弓托12,所述多接头弓托12的一端可拆卸连接在电动机11外壳上,所述电动机11的转轴的一端与打草头13固定连接。
现将具体实施方式说明如下:
一、参见图5、图6、图7、图8,本发明的多接头弓托12是在弓托本体121的一端设有带螺丝或锁扣等紧固件124的电机接头123,并且在靠近电机接头123的一段弓托本体121上设有至少一个轴接耳座122构成。
二、参见图8,本发明的轴接耳座122上还设有第一链轮125,第一链轮125的一面固定连接在轴接耳座122的一面上,并且第一链轮的中心孔40与轴接耳座122上的一个孔40同心。
三、参见图9、图10、图12、图13、图14、图15、图16,本发明提供的打草模块100包括牵引架20和至少一个弓托式打草头10,所述弓托式打草头10通过轴接耳座122上的孔40由轴30铰接在牵引架20的一端。
四、参见图9,本发明的牵引架20示例1是由拖车连接器22的一端连接在架本体21的中部构成。
五、参见图10、图11,本发明的牵引架20示例2是在牵引架20示例1的架本体21上连接有L形行走架29构成,L形行走29架包括L形支架291、万向轮292和弹簧插销293,所述L形支架291的中部孔40通过轴30活动连接在架本体21上,所述万向轮292连接在L形支架291的一端,所述弹簧插销293连接在L形支架291的另一端和万向轮292所在端。
六、参见图7、图16,本发明的牵引架20示例3包括高低位多孔连接件28、长连杆26和短连杆27,所述长连杆26和短连杆27的数量相等,所述高低位多孔连接件28上部的孔通过轴30与长连杆26的一端铰接,下部的孔通过轴30与短连杆27的一端铰接,长连杆26的另一端可通过轴30与轴接耳座122上端的孔40连接,短连杆27的另一端可通过轴30与轴接耳座122下端的孔40连接。
七、参见图13,本发明的牵引架20示例4由双端连杆23的一端与拖车连接器22之间通过轴30铰接构成。
八、参见图8、图14,本发明的牵引架20示例5是在牵引架20示例4上还设有带链条24的第二链轮25构成,所述第二链轮25的一面固定连接在拖车连接器22上,链条24用于连接第二链轮25和轴接耳座122上的第一链轮125。
九、参见图17,本发明的打草无人车包括无人车200和至少一个打草模块100,所述打草模块100的牵引架的一端通过拖车连接器或螺丝活动连接在无人车200的后面,并且打草模块100上的电动机通过导线300与无人车200上的供电模块50连接。
十、参见图1、图2、图3、图4、图5、图6、图7、图8,本发明打草高度的调整时,一只手托住或握住电动机,另一只手松开弓托本体121的电机接头123上的螺丝或锁扣等紧固件124,然后上下移动调节电机接头124上的电动机11的升降,从而调整电动机11下端的打草头13的离地间隙,确定好打草高度后将电机接头123上的螺丝或锁扣等紧固件124紧固即可。
参见图10、图11,本发明L形行走架29的使用方式:在非打草作业状态牵引打草模块100行进时,可以按图10中的状态将弹簧插销293的一端锁止在L形支架291上;需要进行打草作业时,拉动弹簧插销293从L形支架291上解锁,然后一只手托住架本体21,一只手握住仅设有弹簧插销293的L形支架291的一端,向弓托式打草头10的方向拉起至万向轮292升起至极限位置,同时,L形支架291上的另一个弹簧插销293插在架本体21上,即完成L形行走架29的收起;L形行走架29的使用时,先拉动卡在L形支架291上的弹簧插销293解锁,然后手推L形支架291的另一端至其上的弹簧插销293插锁在架本体21上即可(如图10)。
参见图15、图18,本发明的打草模块示例5在无人车的牵引下随地形起伏,变化打草及通过角度的方式:当弓托本体121被牵引移动从坑边下滑的过程中,与其相连的双端连杆23的一端绕拖车连接器22逆时针(地面方向)转动,在此过程中,拖车连接器22上的链轮25拉动双端连杆23上方的链条24,带动弓托本体121上的链轮25顺时针转动,从而带动弓托式打草头10绕双端连杆23的另一端顺时针转动一定角度;当弓托本体121被牵引移动从坑底上滑的过程中,与其相连的双端连杆23的一端绕拖车连接器22顺时针(地面反方向)转动,在此过程中,拖车连接器22上的链轮25拉动双端连杆23下方的链条24,带动弓托本体121上的链轮25逆时针转动,从而带动弓托式打草头10绕双端连杆23的另一端逆时针转动一定角度。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 弓托式打草头、打草模块及打草无人车
- 弓托式打草头、打草模块及打草无人车