一种基于圆盘识别的相机外参估计方法
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及计算机图形学和虚拟现实相结合,具体涉及一种基于圆盘识别的相机外参估计方法。
背景技术
现阶段基于视觉的位姿估计需要标记物具有丰富的纹理以满足特征算子方便特征提取,这恰恰也导致了提取特征算子的过程中计算复杂且运行时间长等问题,与此同时,常由于标记物常突出于自然环境,从而导致了交互性能差和体验感差的问题。
位姿估计是增强现实系统中最重要的环节,现阶段最常用的方案是采集标记物的纹理图案并提取特征点,将特征点集与事先储存的标记模板做特征点匹配,通过求解一个超定方程解决PnP问题实现相机姿态估计。但是提取特征点的过程效率低,且要求标记物纹理丰富。
发明内容
发明目的:本发明目的是提供一种基于圆盘识别的相机外参估计方法,实现快速高效地完成相机位姿估计。
技术方案:一种基于圆盘识别的相机外参估计方法,包括如下步骤:
步骤1:在平面上放置一圆盘,以圆盘圆心为坐标原点建立三维笛卡尔坐标系,在圆盘上方放置相机,调整相机俯仰角,通过圆盘图像的扁度和标记块的位置之间关系,计算相机俯仰角;
步骤2:固定相机位姿,水平旋转圆盘,等效于固定圆盘,在相机同一水平高度旋转的成像效果;通过圆盘图像的扁度和标记块的位置之间关系,计算相机航向角;
步骤3:通过分析圆盘的成像特点,利用相机、圆盘图像和圆盘形成的相似三角形,计算相机位移矩阵;
步骤4:根据步骤1中相机俯仰角和步骤2中的相机航向角,计算相机旋转矩阵;融合相机旋转矩阵和步骤3中的相机位移矩阵组成姿态矩阵最终完成相机位姿估计。
优选地,步骤1具体为:
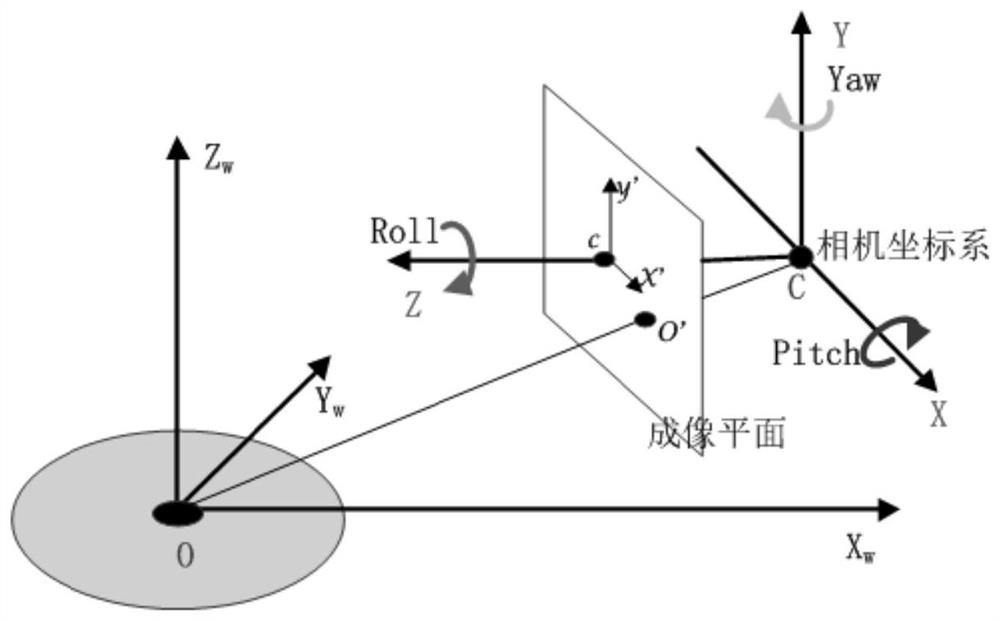
相机先绕X轴,再绕Y轴,后绕Z轴的旋转顺序做姿态变换,以圆盘圆心为为坐标原点建立三维笛卡尔坐标系,此为世界坐标系,以相机光心建立相机坐标系;以三元有序数对(pitch,yaw,roll)表示相机分别绕X轴,Y轴,Z轴旋转pitch,yaw,roll角度来描述相机姿态;
根据投影几何,当相机俯仰角为α时,半径为R的圆投影出来的椭圆短半轴为Rcosα;
利用椭圆图像反推得到相机的俯仰角,即相机的俯仰角Pitch表达式为:
其中,a、b为椭圆的长短半轴。
优选地,步骤2具体为:
选取标记块的形心代表标记块并记做点B;拟合出椭圆后,计算椭圆中心记做点O,椭圆短半轴为b,连接BO;计算BO与b之间的夹角,夹角代表此时相机的航向角。
优选地,步骤3具体为:
步骤3.1:记长轴为a的圆盘图像距离相机的距离为L,因为a是由圆盘半径r投影过来的,具有相似关系,
则圆盘的深度为l,即圆盘与相机的距离Z=l;
步骤3.2:X为圆盘圆心在世界坐标中的位置,x为圆盘圆心所成图像的位置即相片上的位置,也是圆盘圆心相较于注册圆盘的中心位置;以注册圆盘圆心为世界坐标系的原点建立右手坐标系;相似三角形可得:
X偏移量的表达式为:
Y偏移量的表达式为:
根据位移矩阵的几何意义联立公式(2)(3)(4)可得位移矩阵t:
由此得出位移矩阵。
优选地,步骤4具体为:
将相机欧拉角带入公式,其中
Roll=0# (7)
带入旋转矩阵得:
公式(8)为相机旋转矩阵。
矩阵向量如式(5)表示圆盘圆心在相机坐标系中的坐标,而非相机在世界坐标系中的坐标,因此将此位移向量取逆转化为相机在世界坐标系中的坐标,对式(5)取逆得到相机的位置向量t
由公式(8)和公式(9)得到:
公式(10)计算得出相机的位姿矩阵。
有益效果:与现有技术相比,本发明具有如下显著的优点:本发明通过相机以不同角度不同距离采集圆盘图像,和固定相机位姿,水平旋转圆盘时得到圆盘图像,利用投影几何角度分析相机的俯仰角、航向角与圆盘图像的扁度和标记块的位置之间的关系,从而得到相机的旋转矩阵;再通过分析圆盘的成像特点,利用相机、圆盘图像和圆盘形成的相似三角形,得出相机的位移矩阵,最后融合相机旋转矩阵和圆盘位移位移矩阵组成姿态矩阵最终完成相机位姿估计。本发明中圆盘不需要具有丰富的纹理,降低位姿估计算法的难度,实现快速高效地完成相机位姿估计。
附图说明
图1为本发明的坐标示意图;
图2为本发明航向角30度的圆盘示意图;
图3为本发明相机视锥左/主视图。
具体实施方式
下面结合附图对本发明的技术方案作进一步说明。
本发明一种基于圆盘识别的相机外参估计方法,具体按照以下步骤实施:
步骤1:得到的图像参数计算相机俯仰角。
约定相机先绕X轴,再绕Y轴,后绕Z轴的旋转顺序做姿态变换,以圆盘圆心为坐标原点建立三维笛卡尔坐标系,此为世界坐标系,以相机光心建立相机坐标系。以三元有序数对(pitch,yaw,roll),表示相机分别绕X轴,Y轴,Z轴旋转pitch,yaw,roll角度来描述相机姿态。如图1所示。成相平面即为相片生成的平面,C为相机光心,c为相机光心C在成相平面的投影,O’为圆盘圆心O与C连线的交点。
从投影几何角度分析,当相机俯仰角为α时半径为R的圆投出来的椭圆短半轴为Rcosα。
因此根据投影几何,用一个椭圆图像反推出相机的俯仰角。即相机的俯仰角Pitch可写为公式(1):
其中,a、b为椭圆的长短半轴。
步骤2:计算得出相机航向角。
如图2所示,为航向角为30度时的圆盘示意图,。
选取标记块1的形心代表标记块1并记做点B。拟合出椭圆后,计算椭圆中心3记做点O,记椭圆短半轴2为b。连接BO。计算BO与b之间的夹角,夹角代表此时相机的航向角。
步骤3:得到相机的位移矩阵。
同时根据小孔成像模型,可实现圆盘圆心的位移估计。如图3所示,为相机视锥左/主视图;图3中相机光心c,审核平面中心o,以及圆盘圆心在一条直线上,且与圆盘垂直,即为相机正对圆盘,此时的成像平面为审核平面。
步骤3.1:记长轴为a的圆盘图像距离相机L,圆盘半径为r。因为a是由圆盘半径r投影过来的,具有相似关系。则
则圆盘的深度为l,即圆盘与相机的距离Z=l;
步骤3.2:X为圆盘圆心在世界坐标中的位置,x为圆盘圆心图像的位置即在照片上的位置,也是现在圆盘圆心相较于注册圆盘的中心位置。以注册圆盘圆心为世界坐标系的原点建立右手坐标系。相似三角形可得:
可以计算X偏移量有:
同理可以计算Y偏移量有:
根据位移矩阵的几何意义联立公式(2)(3)(4)可得位移矩阵t:
步骤4具体为:
将相机欧拉角带入公式。其中
Roll=0# (7)
带入旋转矩阵得:
为相机旋转矩阵。
矩阵向量如式(5)表示圆盘圆心在相机坐标系中的坐标,而非相机在世界坐标系中的坐标。因此须将此位移向量取逆转化为相机在世界坐标系中的坐标。对式(5)取逆得到相机的位置向量t
由公式(8)和公式(9)得相机的位姿矩阵为:
- 一种基于圆盘识别的相机外参估计方法
- 一种基于多次识别标定板图像的多目相机外参标定精度的提高方法