测量旋转物体垂直移动距离的装置及方法
文献发布时间:2023-06-19 10:54:12
技术领域
本发明属于水轮机组运行监测技术领域,涉及一种测量旋转物体垂直移动距离的装置及方法。
背景技术
为了满足水轮机在部分负荷工况下稳定运行的要求,一般设置有通过发电机上端轴顶部向转轮下方补入自然空气的补气系统;该补气系统一般由进气管、补气阀、补气管、逆止阀、消音装置等组成。机组运行过程中补气阀随着大轴高速旋转而旋转,当转轮室的负压达到设定值时,补气阀阀盘打开,向转轮室补入自然空气,消除负压。
由于补气阀位于大轴中心,是转动部件,目前国内外尚无针对其运行工况很有效的监测手段,一般通过监测进气管风量来间接评估补气阀的动作情况,监测精度不高且不直观。由于这种盘阀动作调整非常频繁,其动作幅度为0~160mm,而且机组运行时盘阀一直是高速旋转的,且大轴上方安装有机头盖,人眼无法直接观察。
发明内容
本发明所要解决的技术问题是提供一种测量旋转物体垂直移动距离的装置及方法,结构简单,采用在同一水平轴向上的激光发射器和透明刻度尺下部设置镜面反射板,激光发射器发出的光源倾斜照射到镜面反射板上,镜面反射板反射的光束与透明刻度尺的刻度对应,激光发射器和透明刻度尺与机头盖板连接,镜面反射板与阀盘连接,大轴旋转带动阀盘和镜面反射板同步旋转,镜面反射板反射的光束间歇扫过透明刻度尺,当光束在透明刻度尺上对应的初始位置发生变化时,即可测量出阀盘高度移动值,不仅能够直观观察阀盘高度的变化,还可精确测得高度变化值,掌握盘阀动作的幅度,操作简单方便。
为解决上述技术问题,本发明所采用的技术方案是:一种测量旋转物体垂直移动距离的装置,它包括镜面反射板、激光发射器、透明刻度尺和机头盖板;所述镜面反射板位于激光发射器和透明刻度尺的下方,激光发射器和透明刻度尺位于同一轴线上与机头盖板连接,激光发射器发出的光源朝向镜面反射板,镜面反射板反射的光源与透明刻度尺的刻度对应。
所述机头盖板上设置贯穿的槽口,透明刻度尺与槽口配合。
所述激光发射器位于机头盖板的下侧面与其连接。
所述激光发射器发出的光源与镜面反射板成倾角状。
所述激光发射器发出的光束照射点位于镜面反射板的中心。
所述镜面反射板反射到透明刻度尺上的初始刻度为零刻度值。
所述镜面反射板旋转时,镜面反射板反射的光束间歇性反射到透明刻度尺上。
所述镜面反射板与激光发射器之间的垂直距离发生变化时,则镜面反射板反射的光点在透明刻度尺上会发生改变。
所述激光发射器与透明刻度尺的零刻度距离为L,激光发射器的光源照射角为θ,激光发射器与镜面反射板的垂直距离为H,则H=0.5L* cotθ。
如上所述的测量旋转物体垂直移动距离的装置的测量方法,它包括如下步骤:
S1,安装镜面反射板,将镜面反射板固定在阀盘上,与阀盘轴径向垂直,反射面朝上;
S2,安装激光发射器,将激光发射器安装于机头盖板下侧,位于镜面反射板的垂直方向上;激光发射器发射的激光束照射在镜面反射板的中心点上;记录镜面反射板到激光发射器之间的初始高度值;记录激光发射器的光源发射角度;
S3,安装透明刻度尺,将透明刻度尺安装在机头盖板的槽口内,镜面反射板反射的激光束照射在透明刻度尺的零刻度值位置;
S4,固定,将机头盖板固定在基坑上方;大轴和补气阀旋转时机头盖板不旋转;
S5,计算,当镜面反射板反射的激光束照射在透明刻度尺的零刻度值始终不变时,则阀盘的高度未发生变化;当镜面反射板反射的激光束照射在透明刻度尺的刻度发生变化时,则阀盘的高度发生改变,采用公式H=0.5L* cotθ计算阀盘离激光发射器的高度值;该高度值与初始高度值之差为阀盘垂直移动距离。
一种测量旋转物体垂直移动距离的装置,它包括镜面反射板、激光发射器、透明刻度尺和机头盖板;镜面反射板位于激光发射器和透明刻度尺的下方,激光发射器和透明刻度尺位于同一轴线上与机头盖板连接,激光发射器发出的光源朝向镜面反射板,镜面反射板反射的光源与透明刻度尺的刻度对应。结构简单,通过在同一水平轴向上的激光发射器和透明刻度尺下部设置镜面反射板,激光发射器发出的光源倾斜照射到镜面反射板上,镜面反射板反射的光束与透明刻度尺的刻度对应,激光发射器和透明刻度尺与机头盖板连接,镜面反射板与阀盘连接,大轴旋转带动阀盘和镜面反射板同步旋转,镜面反射板反射的光束间歇扫过透明刻度尺,当光束在透明刻度尺上对应的初始位置发生变化时,即可测量出阀盘高度移动值,不仅能够直观观察阀盘高度的变化,还可精确测得高度变化值,掌握盘阀动作的幅度,操作简单方便。
在优选的方案中,机头盖板上设置贯穿的槽口,透明刻度尺与槽口配合。结构简单,安装时,透明刻度尺位于机头盖板贯穿的槽口内与其配合,当镜面反射板反射的光束从下向上穿透透明刻度尺时,即可清晰的看到光束对应的刻度值。
在优选的方案中,激光发射器位于机头盖板的下侧面与其连接。结构简单,安装时,机头盖板与基坑配合固定,位于机头盖板下侧的激光发射器不受干扰,稳定性好。
在优选的方案中,激光发射器发出的光源与镜面反射板成倾角状。结构简单,使用时,通过倾斜的激光发射器发出的光源与镜面反射板成倾角,镜面反射板反射的光束也成倾角,照射在透明刻度尺上。
在优选的方案中,激光发射器发出的光束照射点位于镜面反射板的中心。结构简单,使用时,激光发射器发出的光束照射点位于镜面反射板的中心,使得光束射入角和反射角相对于光束照射点垂直中心相互对称。
在优选的方案中,镜面反射板反射到透明刻度尺上的初始刻度为零刻度值。结构简单,使用时,将镜面反射板反射到透明刻度尺上的初始刻度设置为零刻度值,有利于在刻度值变化时读数,便于计算。
在优选的方案中,镜面反射板旋转时,镜面反射板反射的光束间歇性反射到透明刻度尺上。结构简单,使用时,当大轴带动阀盘旋转时,位于阀盘上的镜面反射板随其同步旋转,每当镜面反射板旋转一周经过激光发射器发出的光束照射时,将光束反射至透明刻度尺上,形成间歇式反射,在大轴不断旋转下,位于透明刻度尺上出现不断闪烁的光束。
在优选的方案中,镜面反射板与激光发射器之间的垂直距离发生变化时,则镜面反射板反射的光点在透明刻度尺上会发生改变。结构简单,使用时,当阀盘升降过程中,镜面反射板随之升降,则镜面反射板的反射角也发生变化,反射角发生变化后反射到透明刻度尺上的刻度值相应变化。
在优选的方案中,激光发射器与透明刻度尺的零刻度距离为L,激光发射器的光源照射角为θ,激光发射器与镜面反射板的垂直距离为H,则H=0.5L* cotθ。结构简单,通过已知激光发射器与透明刻度尺之间距离、激光发射器的光源照射角求解得出激光发射器与镜面反射板的垂直距离。
在优选的方案中,如上测量旋转物体垂直移动距离的装置的测量方法,它包括如下步骤:
S1,安装镜面反射板,将镜面反射板固定在阀盘上,与阀盘轴径向垂直,反射面朝上;
S2,安装激光发射器,将激光发射器安装于机头盖板下侧,位于镜面反射板的垂直方向上;激光发射器发射的激光束照射在镜面反射板的中心点上;记录镜面反射板到激光发射器之间的初始高度值;记录激光发射器的光源发射角度;
S3,安装透明刻度尺,将透明刻度尺安装在机头盖板的槽口内,镜面反射板反射的激光束照射在透明刻度尺的零刻度值位置;
S4,固定,将机头盖板固定在基坑上方;大轴和补气阀旋转时机头盖板不旋转;
S5,计算,当镜面反射板反射的激光束照射在透明刻度尺的零刻度值始终不变时,则阀盘的高度未发生变化;当镜面反射板反射的激光束照射在透明刻度尺的刻度发生变化时,则阀盘的高度发生改变,采用公式H=0.5L* cotθ计算阀盘离激光发射器的高度值;该高度值与初始高度值之差为阀盘垂直移动距离。该方法操作简单方便,有利于直观观察阀盘变动情况,精确计算阀盘垂直移动的距离。
一种测量旋转物体垂直移动距离的装置及方法,它包括镜面反射板、激光发射器、透明刻度尺和机头盖板,通过在同一水平轴向上的激光发射器和透明刻度尺下部设置镜面反射板,激光发射器发出的光源倾斜照射到镜面反射板上,镜面反射板反射的光束与透明刻度尺的刻度对应,激光发射器和透明刻度尺与机头盖板连接,镜面反射板与阀盘连接,大轴旋转带动阀盘和镜面反射板同步旋转,镜面反射板反射的光束间歇扫过透明刻度尺,当光束在透明刻度尺上对应的初始位置发生变化时,即可测量出阀盘高度移动值。本发明克服了原水轮机补气阀盘随大轴旋转不能直接观察垂直移动变化的问题,具有结构简单,不仅能够直观观察阀盘高度的变化,还可精确测得高度变化值,掌握盘阀动作的幅度,操作简单方便的特点。
附图说明
下面结合附图和实施例对本发明作进一步说明:
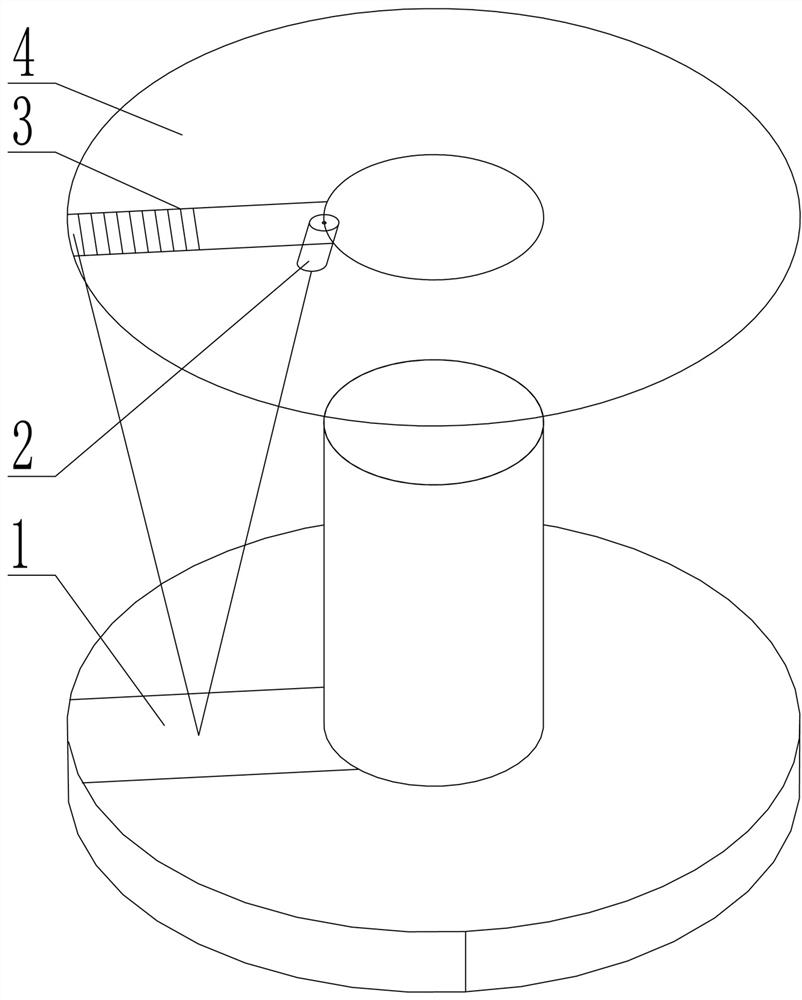
图1为本发明的结构示意图。
图2为图1的俯视示意图。
图3为本发明大轴补气阀垂直位移图。
图4为本发明使用状态图。
图中:镜面反射板1,激光发射器2,透明刻度尺3,机头盖板4。
具体实施方式
如图1~图4中,一种测量旋转物体垂直移动距离的装置,它包括镜面反射板1、激光发射器2、透明刻度尺3和机头盖板4;所述镜面反射板1位于激光发射器2和透明刻度尺3的下方,激光发射器2和透明刻度尺3位于同一轴线上与机头盖板4连接,激光发射器2发出的光源朝向镜面反射板1,镜面反射板1反射的光源与透明刻度尺3的刻度对应。结构简单,通过在同一水平轴向上的激光发射器2和透明刻度尺3下部设置镜面反射板1,激光发射器2发出的光源倾斜照射到镜面反射板1上,镜面反射板1反射的光束与透明刻度尺3的刻度对应,激光发射器2和透明刻度尺3与机头盖板4连接,镜面反射板1与阀盘连接,大轴旋转带动阀盘和镜面反射板1同步旋转,镜面反射板1反射的光束间歇扫过透明刻度尺3,当光束在透明刻度尺3上对应的初始位置发生变化时,即可测量出阀盘高度移动值,不仅能够直观观察阀盘高度的变化,还可精确测得高度变化值,掌握盘阀动作的幅度,操作简单方便。
优选的方案中,所述机头盖板4上设置贯穿的槽口,透明刻度尺3与槽口配合。结构简单,安装时,透明刻度尺3位于机头盖板4贯穿的槽口内与其配合,当镜面反射板1反射的光束从下向上穿透透明刻度尺3时,即可清晰的看到光束对应的刻度值。
优选的方案中,所述激光发射器2位于机头盖板4的下侧面与其连接。结构简单,安装时,机头盖板4与基坑配合固定,位于机头盖板4下侧的激光发射器2不受干扰,稳定性好。
优选的方案中,所述激光发射器2发出的光源与镜面反射板1成倾角状。结构简单,使用时,通过倾斜的激光发射器2发出的光源与镜面反射板1成倾角,镜面反射板1反射的光束也成倾角,照射在透明刻度尺3上。
优选的方案中,所述激光发射器2发出的光束照射点位于镜面反射板1的中心。结构简单,使用时,激光发射器2发出的光束照射点位于镜面反射板1的中心,使得光束射入角和反射角相对于光束照射点垂直中心相互对称。
优选的方案中,所述镜面反射板1反射到透明刻度尺3上的初始刻度为零刻度值。结构简单,使用时,将镜面反射板1反射到透明刻度尺3上的初始刻度设置为零刻度值,有利于在刻度值变化时读数,便于计算。
优选的方案中,所述镜面反射板1旋转时,镜面反射板1反射的光束间歇性反射到透明刻度尺3上。结构简单,使用时,当大轴带动阀盘旋转时,位于阀盘上的镜面反射板1随其同步旋转,每当镜面反射板1旋转一周经过激光发射器2发出的光束照射时,将光束反射至透明刻度尺3上,形成间歇式反射,在大轴不断旋转下,位于透明刻度尺3上出现不断闪烁的光束。
优选的方案中,所述镜面反射板1与激光发射器2之间的垂直距离发生变化时,则镜面反射板1反射的光点在透明刻度尺3上会发生改变。结构简单,使用时,当阀盘升降过程中,镜面反射板1随之升降,则镜面反射板1的反射角也发生变化,反射角发生变化后反射到透明刻度尺3上的刻度值相应变化。
优选的方案中,所述激光发射器2与透明刻度尺3的零刻度距离为L,激光发射器2的光源照射角为θ,激光发射器2与镜面反射板1的垂直距离为H,则H=0.5L* cotθ。结构简单,通过已知激光发射器2与透明刻度尺3之间距离、激光发射器2的光源照射角求解得出激光发射器2与镜面反射板1的垂直距离。
优选的方案中,如上所述的测量旋转物体垂直移动距离的装置的测量方法,它包括如下步骤:
S1,安装镜面反射板,将镜面反射板1固定在阀盘上,与阀盘轴径向垂直,反射面朝上;
S2,安装激光发射器,将激光发射器2安装于机头盖板4下侧,位于镜面反射板1的垂直方向上;激光发射器2发射的激光束照射在镜面反射板1的中心点上;记录镜面反射板1到激光发射器2之间的初始高度值;记录激光发射器2的光源发射角度;
S3,安装透明刻度尺,将透明刻度尺3安装在机头盖板4的槽口内,镜面反射板1反射的激光束照射在透明刻度尺3的零刻度值位置;
S4,固定,将机头盖板4固定在基坑上方;大轴和补气阀旋转时机头盖板4不旋转;
S5,计算,当镜面反射板1反射的激光束照射在透明刻度尺3的零刻度值始终不变时,则阀盘的高度未发生变化;当镜面反射板1反射的激光束照射在透明刻度尺3的刻度发生变化时,则阀盘的高度发生改变,采用公式H=0.5L* cotθ计算阀盘离激光发射器2的高度值;该高度值与初始高度值之差为阀盘垂直移动距离。该方操作简单方便,有利于直观观察阀盘变动情况,精确计算阀盘垂直移动的距离。
实施例:
激光线与垂直方向的夹角为θ,机头盖板4上安装一个透明刻度板,刻度板与激光源的水平距离为L,垂直方向上激光源与大轴盘阀的垂直距离设定为H,则H=0.5L*cotθ,通过此关系,计算出一系列的H值来。还可以算出补气阀的开度W。(W=Hi-H1),i=1、2、3
通过计算,得出H和L的关系,获得如下对应参数表:
大轴补气盘阀,其运动方向有两个,一个是沿Y轴方向旋转,另一个是沿Y轴方向上下移动,其移动范围为0-160mm,移动的距离取决于盘阀上下两侧的压力差。镜面反射板,水平安装在补气盘阀上面。激光源,其安装方向与Y轴成θ角,激光源安装在机头盖板4,通过支架安装,不旋转。激光线,随着盘阀的移动,激光线入射光不变,反射光会平行移动。刻度尺,是一个水平安装的透明板,上面标注了刻度,刻度L与位置H的关系见上表。
假定初始时刻,大轴补气阀在第一位置时,激光线经过反射后打在刻度尺上,形成的反光点与激光源的距离为L1,此时盘阀与激光源的垂直距离为H1,由三角几何关系H1=0.5L1*cotθ计算得出,同理,当盘阀由于内外压力差移动到第二位置时,H2=0.5L2*cotθ,大轴补气阀的开度W=H2-H1=0.5(L2-L1)*cotθ,其他点位关系依次类推,测得L长度,θ角已知,计算H和W的值。
如上所述的测量旋转物体垂直移动距离的装置及方法,安装使用时,在同一水平轴向上的激光发射器2和透明刻度尺3下部设置镜面反射板1,激光发射器2发出的光源倾斜照射到镜面反射板1上,镜面反射板1反射的光束与透明刻度尺3的刻度对应,激光发射器2和透明刻度尺3与机头盖板4连接,镜面反射板1与阀盘连接,大轴旋转带动阀盘和镜面反射板1同步旋转,镜面反射板1反射的光束间歇扫过透明刻度尺3,当光束在透明刻度尺3上对应的初始位置发生变化时,即可测量出阀盘高度移动值,不仅能够直观观察阀盘高度的变化,还可精确测得高度变化值,掌握盘阀动作的幅度,操作简单方便。
安装时,透明刻度尺3位于机头盖板4贯穿的槽口内与其配合,当镜面反射板1反射的光束从下向上穿透透明刻度尺3时,即可清晰的看到光束对应的刻度值。
安装时,机头盖板4与基坑配合固定,位于机头盖板4下侧的激光发射器2不受干扰,稳定性好。
在优选的方案中,所述激光发射器2发出的光源与镜面反射板1成倾角状。结构简单,使用时,通过倾斜的激光发射器2发出的光源与镜面反射板1成倾角,镜面反射板1反射的光束也成倾角,照射在透明刻度尺3上。
使用时,激光发射器2发出的光束照射点位于镜面反射板1的中心,使得光束射入角和反射角相对于光束照射点垂直中心相互对称。
使用时,将镜面反射板1反射到透明刻度尺3上的初始刻度设置为零刻度值,有利于在刻度值变化时读数,便于计算。
使用时,当大轴带动阀盘旋转时,位于阀盘上的镜面反射板1随其同步旋转,每当镜面反射板1旋转一周经过激光发射器2发出的光束照射时,将光束反射至透明刻度尺3上,形成间歇式反射,在大轴不断旋转下,位于透明刻度尺3上出现不断闪烁的光束。
使用时,当阀盘升降过程中,镜面反射板1随之升降,则镜面反射板1的反射角也发生变化,反射角发生变化后反射到透明刻度尺3上的刻度值相应变化。
通过已知激光发射器2与透明刻度尺3之间距离、激光发射器2的光源照射角求解得出激光发射器2与镜面反射板1的垂直距离。
上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本申请中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
- 测量旋转物体垂直移动距离的装置及方法
- 一种基于旋转编码技术的物体表面高精度三维测量方法及其装置