多片产品自动搬运并保持位置可返回搬运头机构
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及产品搬运的技术领域,具体为多片产品自动搬运并保持位置可返回搬运头机构。
背景技术
现有的芯片制作完成后,需要传送沿着轨道传送到检测位置进行检测或从一个位置搬运到检测位(无轨道模式搬运),现有的检测位置的芯片搬运均通过人工手动或机械手从上方下来后搬运转运到另一个位置,搬运的效率低下,且位置准确度精度需要二次多向定位且运转连续性不太理想,为此急需一块能够步进准确搬运芯片至检测位置的机构。
发明内容
针对上述问题,本发明提供了多片产品自动搬运并保持位置可返回搬运头机构,其将进入轨道起始端的芯片准确步进搬运到检测位置,并可保持芯片位置固定定位使其检测,同时搬运机构可返回到搬运位夹爪可上升到产品能夹紧的高度等待检测完成再进行周而复始的工作,输出产品,其使得搬运效率高、且搬运精度高,保证了检测的准确可靠。
多片产品自动搬运并保持位置可返回搬运头机构,其特征在于:其包括两端的端座,两端端座之间设置有长度方向布置的导向轨道,所述导向轨道的宽度中间位置设置有搬运避让直槽,所述搬运避让直槽将导轨轨道分隔形成两侧轨道边,两侧的轨道边分别支承于对应侧的工作台面布置,所述工作台面上设置有检测工位,所述检测工位通过支架设置有三台检测相机,所述搬运避让直槽的正下方排布有升降连接板,所述升降连接板沿着其长度方向排布有若干上凸搬运块,所述上凸搬运块仿形于待搬运产品的底部对应形状布置,所述升降连接板的底部固接有顶升气缸的上部输出端,所述顶升气缸的缸座固装于搬运电缸的输出端,所述搬运电缸的输出端运动方向平行于所述搬运避让直槽布置,所述搬运避让直槽还设置有间隔布置的位置固定的第一上凸定位块,每个第一上凸定位块对应布置有第二上凸夹紧块,所述上凸夹紧块的底部分别连接传动杆的对应位置,所述传动杆连接夹紧气缸的输出端,所述升降连接板、上凸搬运块和第一上凸定位块、第二上凸夹紧块互不干涉运动,所述第二上凸夹紧块处于夹紧状态时和第一上凸定位块配合用于待搬运产品的位置定位,每个上凸搬运块对应于一个第一上凸定位块布置,所述搬运电缸步进搬运的距离即为两个相邻的第一上凸定位块之间的间距。
其进一步特征在于:
所述搬运电缸的固装于回退气缸的输出端,所述回退气缸的输出端活动方向平行于所述搬运电缸的输出端活动方向,所述回退气缸固装于安装支架的底板,所述底板通过连接架固接所述工作台面,确保整个结构稳固可靠;
所述检测工位对应于其中一个位置固定的产品进行检测,确保检测准确可靠;
位于轨道起始端的第一上凸定位块的另一侧没有对应的第二上凸夹紧块,其使得前方输送到的产品在第一上凸定位块的位置停止,确保后续上凸搬运块的可靠上行搬运;
所述上凸搬运块进行搬运作业时的高度高于第一上凸定位块、第二上凸夹紧块的高度,确保搬运作业准确可靠进行。
采用本发明后,产品被前部产线输送到导向轨道上,产品的两侧分别支承于两侧的轨道边,此时每个产品被定位倚靠于第一上凸定位块的止口位置,顶升气缸带动上凸搬运块将位置准确的产品顶起到一定高度,之后搬运电缸作业,将产品沿着导向轨道向前步进一个单位距离,之后顶升气缸下降,使得产品再次支承于两侧的轨道边、且长度方向位于对应的第一上凸定位块、第二上凸夹紧块之间的区域,搬运气缸带动脱离产品的上凸搬运块向后复位,之后第二上凸夹紧块在夹紧气缸的作用下长度方向对位,使得产品被精准定位,之后处于检测工位的产品通过三台相近进行检测,检测完成后,夹紧气缸带动第二上凸夹紧块松开产品,处于导向轨道上的产品再次重复上述步进动作,其将进入轨道起始端的芯片准确步进搬运到检测位置,然后输出,其使得搬运效率高、且搬运精度高,保证了检测的准确可靠。
附图说明
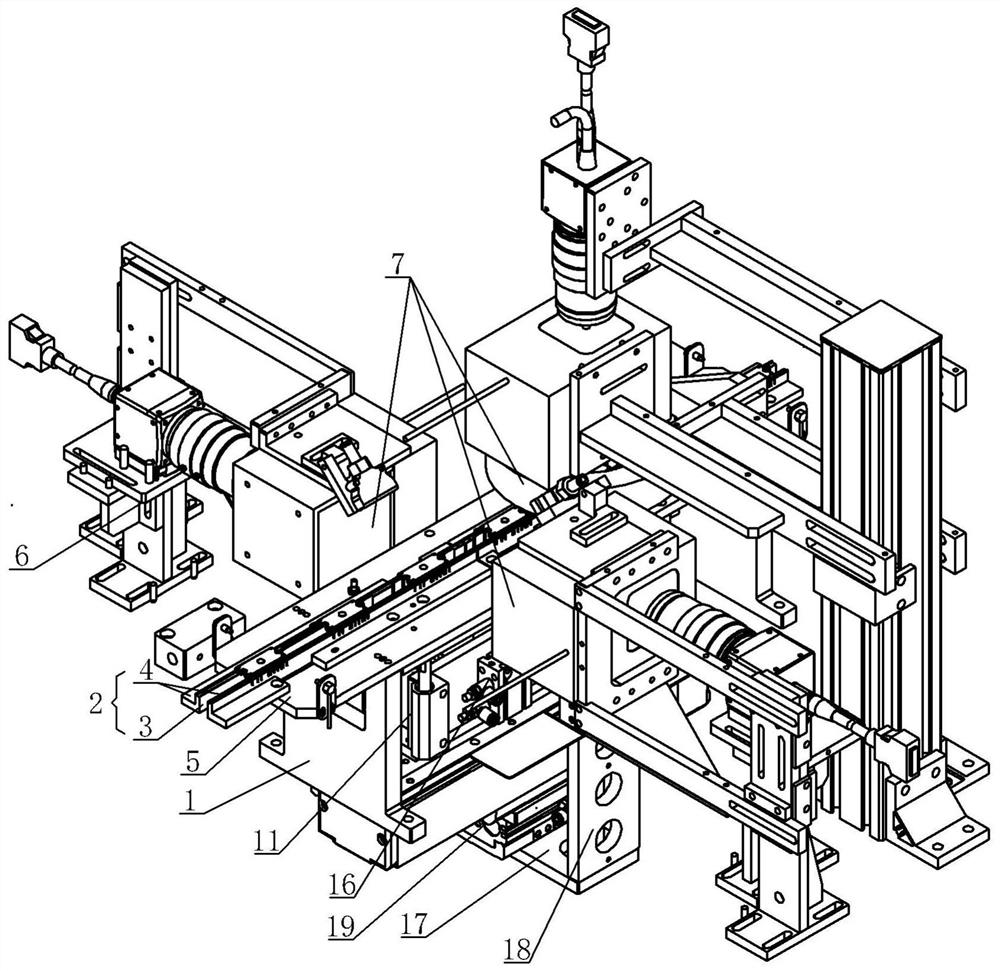
图1为本发明的立体图结构示意图;
图2为本发明的除去检测相机的带有一条轨道边的立体示意图;
图中序号所对应的名称如下:
端座1、导向轨道2、搬运避让直槽3、轨道边4、工作台面5、支架6、检测相机7、升降连接板8、上凸搬运块9、待搬运产品10、顶升气缸11、搬运电缸12、第一上凸定位块13、第二上凸夹紧块14、传动杆15、夹紧气缸16、底板17、连接架18、回退气缸19。
具体实施方式
多片产品自动搬运并保持位置可返回搬运头机构,见图1、图2:其包括两端的端座1,两端端座1之间设置有长度方向布置的导向轨道2,导向轨道2的宽度中间位置设置有搬运避让直槽3,搬运避让直槽3将导轨轨道分隔形成两侧轨道边4,两侧的轨道边4分别支承于对应侧的工作台面5布置,工作台面5上设置有检测工位,检测工位通过支架6设置有三台检测相机7,搬运避让直槽3的正下方排布有升降连接板8,升降连接板8沿着其长度方向排布有若干上凸搬运块9,上凸搬运块9仿形于待搬运产品10的底部对应形状布置,升降连接板8的底部固接有顶升气缸11的上部输出端,顶升气缸11的缸座固装于搬运电缸12的输出端,搬运电缸12的输出端运动方向平行于搬运避让直槽3布置,搬运避让直槽3还设置有间隔布置的位置固定的第一上凸定位块13,每个第一上凸定位块13对应布置有第二上凸夹紧块14,上凸夹紧块14的底部分别连接传动杆15的对应位置,传动杆15连接夹紧气缸16的输出端,升降连接板8、上凸搬运块9和第一上凸定位块13、第二上凸夹紧块14互不干涉运动,第二上凸夹紧块14处于夹紧状态时和第一上凸定位块13配合用于待搬运产品10的位置定位,每个上凸搬运块9对应于一个第一上凸定位块13布置,搬运电缸12步进搬运的距离即为两个相邻的第一上凸定位块13之间的间距。
搬运电缸12的固装于回退气缸19的输出端,回退气缸19微动纠偏,回退气缸19的输出端活动方向平行于搬运电缸12的输出端活动方向,回退气缸19固装于安装支架的底板17,底板17通过连接架18固接工作台面5,确保整个结构稳固可靠;
检测工位对应于其中一个位置固定的产品进行检测,确保检测准确可靠;
位于轨道起始端的第一上凸定位块13的另一侧没有对应的第二上凸夹紧块14,其使得前方输送到的产品在第一上凸定位块13的位置停止,确保后续上凸搬运块9的可靠上行搬运;
上凸搬运块9进行搬运作业时的高度高于第一上凸定位块13、第二上凸夹紧块14的高度,确保搬运作业准确可靠进行。
其工作原理如下:产品被前部产线输送到导向轨道上,产品的两侧分别支承于两侧的轨道边,此时每个产品被定位倚靠于第一上凸定位块的止口位置,顶升气缸带动上凸搬运块将位置准确的产品顶起到一定高度,之后搬运电缸作业,将产品沿着导向轨道向前步进一个单位距离,之后顶升气缸下降,使得产品再次支承于两侧的轨道边、且长度方向位于对应的第一上凸定位块、第二上凸夹紧块之间的区域,搬运气缸带动脱离产品的上凸搬运块向后复位,且通过通过回退气缸微动纠偏,之后第二上凸夹紧块在夹紧气缸的作用下长度方向对位,使得产品被精准定位,之后处于检测工位的产品通过三台相近进行检测,检测完成后,夹紧气缸带动第二上凸夹紧块松开产品,处于导向轨道上的产品再次重复上述步进动作,其将进入轨道起始端的芯片准确步进搬运到检测位置,然后输出,其使得搬运效率高、且搬运精度高,保证了检测的准确可靠。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 多片产品自动搬运并保持位置可返回搬运头机构
- 多片产品自动搬运并保持位置可返回搬运头机构