一种车辆电液馈能型互联悬架系统及其控制方法
文献发布时间:2023-06-19 10:55:46
技术领域
本发明属于汽车悬架技术领域,具体涉及一种车辆电液馈能型互联悬架系统及其控制方法。
背景技术
随着汽车技术的快速提高、国民经济的快速增长,我国汽车保有量也呈快速增长的趋势,但交通事故也越发频繁的发生,通过研究发现车辆翻滚事故在所有交通事故中所占比例不是最多的,但致死率却是最高的,仅次于车辆碰撞事故。因此,如何保证车辆良好的制动性及抗侧翻性受到广泛学者的关注。悬架作为连接车身与底盘的结构,其性能直接影响到汽车的制动性和抗侧翻能力。当悬架系统具有较差的抗俯仰性能,则车辆制动时车身姿态保持能力较差,导致重心前移、后轮接地性变差,使汽车在紧急制动时的制动距离增加。当悬架抗侧倾的性能较差时,汽车抵抗侧翻的能力就会变差。汽车操稳性是评价悬架的重要指标之外,平顺性也是评价悬架的重要指标。对于传统悬架而言,传统被动悬架由于刚度、阻尼等参数是固定不变的,不能在全工况下兼顾行驶的平顺性和操稳性。为了减小车辆在转弯时的侧倾角,引入了横向稳定杆,虽增加了汽车的侧倾刚度,但也增加了车辆的翘曲刚度,恶化了车辆的扭曲路面上的车轮接地性,降低了车辆的通过性及安全性,在较好的路况下行驶时,一定程度恶化了行驶的平顺性。主动悬架可以实现刚度和阻尼的调节,其本质就是使路面输入的振动在传递至车身前进一步的被吸收或抵消,提高平顺性,也可以增大汽车转弯、制动时的侧倾角和俯仰角、提高行驶的操稳性,但主动悬架由于造价高、高功耗等缺点,而高功耗是限制它在市场上大范围推广的原因。半主动悬架可根据路面的不同激励,调节刚度或阻尼,以适应不同路面的变化,但半主动悬架只能调节刚度或者阻尼,一定程度限制了其性能的发挥,无法满足汽车在中国复杂路面下的安全性及平顺性。另一方面,环境污染与能源短缺促进了新能源快速发展。在汽车各个零件当中,传统悬架能量损耗占汽车总输出功率的18.2%,因此,悬架振动能量回收技术对新能源车辆、能源再利用有奠基的深厚的意义,对进一步促进产业发展有重要的战略意义。
液压互联悬架通过液压管路将四个液压缸连接起来,不同的连接形式具有不同的连接效果。有的连接形式的液压互联悬架能够提高车辆的侧倾刚度,减小车辆转弯时的侧倾角,提高车辆的行驶安全性;有的连接形式的液压互联悬架能够提高车辆的俯仰刚度,改善驾驶员和乘客的乘坐舒适性;有的连接形式的液压互联悬架能够改善轮胎的接地性,提高车辆的越野性能。现已有学者在液压互联悬架系统里加入馈能单元,在汽车行驶的过程中,将路面的激励能量转换为电能,供汽车其他用电器使用,提高了能源利用率。但现有的液压互联悬架没有将抗侧倾性、抗俯仰性、馈能性整体结合起来研究其对汽车行驶操稳性及平顺性的影响。如申请号为201610159453.8的中国发明专利“一种液压互联式馈能悬架”将液压互联系统和馈能系统集成,将振动的能量进行回收,但难以改善汽车的抗俯仰、抗侧倾的能力;如申请号201710198176.6的中国发明专利“一种液压互联系统管路连接模式切换装置及控制方法”通过电磁阀将液压管路连接起来,并通过控制电磁阀实现汽车抗俯仰、抗侧倾的功能,提高行驶的操稳性,但没有对振动能量进行回收,降低了能源的回收利用率。
发明内容
本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种车辆电液馈能型互联悬架系统,其系统结构简单,设计合理,实现方便,能够广泛应用在各种类型的车辆中,结合控制方法,在提高车辆操稳性、平顺性和安全性的同时,节约了能源,使用效果好,便于推广使用。
为解决上述技术问题,本发明采用的技术方案是:一种车辆电液馈能型互联悬架系统,包括均连接在车辆簧载质量上的第一双作用液压缸、第二双作用液压缸、第三双作用液压缸和第四双作用液压缸,以及第一三位四通电磁换向阀、第二三位四通电磁换向阀、第一整流桥、第二整流桥、能量回收单元和模式切换控制器;所述第一双作用液压缸的上腔与第一整流桥连接,第一双作用液压缸的下腔与第二整流桥连接,所述第二双作用液压缸的上腔通过第二三位四通电磁换向阀与第一整流桥连接,所述第二双作用液压缸的下腔通过第二三位四通电磁换向阀与第二整流桥连接,所述第三双作用液压缸的上腔与第二整流桥连接,所述第三双作用液压缸的下腔与第一整流桥连接,所述第四双作用液压缸的上腔通过第一三位四通电磁换向阀与第二整流桥连接,所述第四双作用液压缸的下腔通过第一三位四通电磁换向阀与第一整流桥连接,所述第一整流桥和第二整流桥均与能量回收单元连接,所述第一三位四通电磁换向阀和第二三位四通电磁换向阀均与模式切换控制器连接。
上述的一种车辆电液馈能型互联悬架系统,所述第一整流桥包括第一整流分路、第二整流分路、第三整流分路、第四整流分路和第一馈能分路,所述第一整流分路、第二整流分路、第三整流分路、第四整流分路和第一馈能分路相互并行连接,所述第一整流分路上设置有第一单向阀和第二单向阀,所述第二整流分路上设置有第三单向阀和第四单向阀,所述第三整流分路上设置有第五单向阀和第六单向阀,所述第四整流分路上设置有第七单向阀和第八单向阀,所述第一馈能分路上随液压油流动方向依次设置有第一蓄能器与第一液压马达,所述第一液压马达上连接有第一发电机;所述第二整流桥包括第五整流分路、第六整流分路、第七整流分路、第八整流分路和第二馈能分路,所述第五整流分路、第六整流分路、第七整流分路、第八整流分路和第二馈能分路相互并行连接,所述第五整流分路上设置有第九单向阀和第十单向阀,所述第六整流分路上设置有第十一单向阀和第十二单向阀,所述第七整流分路上设置有第十三单向阀和第十四单向阀,所述第八整流分路上设置有第十五单向阀和第十六单向阀,所述第二馈能分路上随液压油流动方向依次设置有第二蓄能器与第二液压马达,所述第二液压马达上连接有第二发电机。
上述的一种车辆电液馈能型互联悬架系统,所述第一蓄能器和第二蓄能器中预充气体均为氮气,预充气压力为10bar,体积为0.65L;所述第一单向阀、第三单向阀、第五单向阀、第七单向阀、第十单向阀、第十二单向阀、第十四单向阀和第十六单向阀的开启压力均为0.4bar,所述第二单向阀、第四单向阀、第六单向阀、第八单向阀、第九单向阀、第十一单向阀、第十三单向阀和第十五单向阀的开启压力均为3.5bar。
上述的一种车辆电液馈能型互联悬架系统,所述能量回收单元包括超级电容、蓄电池和DSP处理器,所述DSP处理器的输出端接有第一MOSFET模块和第二MOSFET模块,所述DSP处理器的输入端接有用于实时检测超级电容端电压的电压传感器,所述第一MOSFET模块的输入端接有第一升降压模块,所述第一升降压模块的输入端接有整流分压模块,所述第一发电机和第二发电机均与整流分压模块的输入端连接,所述第一MOSFET模块的输出端通过均压电路模块与超级电容连接,所述超级电容与第二MOSFET模块的输入端连接,所述第二MOSFET模块的输出端接有第二升降压模块,所述第二升降压模块的输出端接有稳压电路模块,所述蓄电池通过二极管与稳压电路模块的输出端连接。
本发明还公开了一种车辆电液馈能型互联悬架系统的控制方法,采用上述系统,包括车辆运行过程中电液馈能型互联悬架的工作模式切换方法和电液馈能型互联悬架的能量回收方法;
所述工作模式切换方法的具体步骤包括:
步骤A1、路面信息采集与传输;
通过车载摄像头和车载雷达对车前路面进行预瞄识别,车载摄像头将采集到的图像信息传输到图像处理器中,车载雷达将采集的距离信息传输到车载ECU中;
步骤A2、图像信息处理与传输;
图像处理器采用卷积神经网络对道路标线及障碍物进行图像识别,对道路标线进行拟合,并根据障碍物及道路曲率进一步计算出预判转弯半径R,图像处理器将数据结果传输到车载ECU中;
步骤A3、数据处理与切换控制;
步骤A301、车载ECU根据公式
步骤A302、车载ECU根据公式
步骤A303、车载ECU根据公式
步骤A304、根据车载ECU获取的数据和车辆到达障碍物时间t,通过模式切换控制器提前一段时间进行模式切换;返回步骤A1。
所述能量回收方法的具体步骤包括:
步骤B1、所述电压传感器对超级电容的端电压进行实时检测,并将端电压检测值U
步骤B2、所述DSP处理器对端电压检测值U
步骤B3、所述超级电容释能,具体过程为:
所述DSP处理器输出PWM1和PWM2两路信号,其中,PWM1为低电平信号,使第一MOSFET模块打开,PWM2为高电平信号,使第二MOSFET模块闭合,超级电容放电,超级电容释放的电能依次通过第二升降压模块和稳压电路模块后,产生稳定的充电电压,再经过二极管对蓄电池进行充电,超级电容的端电压逐渐降低,返回步骤B1;
步骤B4、所述超级电容充能,具体过程为:
所述DSP处理器输出PWM1和PWM2两路信号,其中,PWM1为高电平信号,使第一MOSFET模块闭合,PWM2为低电平信号,使第二MOSFET模块打开,超级电容充电,第一发电机和第二发电机产生的电能依次通过整流分压模块、第一升降压模块和均压电路模块后,得到稳定的充电电压,对超级电容进行充电,超级电容的端电压逐渐上升,返回步骤B1;
步骤B5、所述超级电容静置,所述DSP处理器不输出信号,返回步骤B1。
上述的一种车辆电液馈能型互联悬架系统的控制方法,步骤A304中所述根据车载ECU获取的数据和车辆到达障碍物时间t,通过模式切换控制器提前一段时间进行模式切换的具体过程包括:
步骤A30401、当预判转弯半径R大于等于转弯半径设置值R
步骤A30402、当预判向心加速度a
步骤A30403、当预判切向加速度a
上述的一种车辆电液馈能型互联悬架系统的控制方法,所述侧倾模式包括第一侧倾模态和第二侧倾模态;
当车辆电液馈能型互联悬架系统处于所述第一侧倾模态时,所述第一双作用液压缸拉伸,所述第二双作用液压缸拉伸,所述第三双作用液压缸压缩,所述第四双作用液压缸压缩,所述第一三位四通电磁换向阀和第二三位四通电磁换向阀通过模式切换控制器控制,均移向左位;
所述第一双作用液压缸拉伸,导致第一双作用液压缸的下腔体积减小,使下腔的液压油通过液压管路流入第六整流分路中;第六整流分路中液压油经过第十一单向阀流入第二馈能分路中;
所述第二双作用液压缸拉伸,导致第二双作用液压缸的下腔体积减小,使下腔液压油通过液压管路流入第二三位四通电磁换向阀中;液压油从第二三位四通电磁换向阀的T口流入,B口流出;从第二三位四通电磁换向阀流出的液压油通过液压管路流入第八整流分路中;第八整流分路中液压油经过第十五单向阀流入第二馈能分路中;
所述第三双作用液压缸压缩,导致第三双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第七整流分路中;第七整流分路中液压油经过第十三单向阀流入第二馈能分路中;
所述第四双作用液压缸压缩,导致第四双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第一三位四通电磁换向阀;液压油从第一三位四通电磁换向阀的A口流入,P口流出;从第一三位四通电磁换向阀流出的液压油通过液压管路流入第五整流分路中;第五整流分路中液压油经过第九单向阀流入第二馈能分路中;
所述第二馈能分路中因液压油流入导致压力增大,当压力达到第二蓄能器的工作压力时,第二馈能分路中液压油流入第二蓄能器中,压缩气室内体积,使压力达到平衡;所述第一整流桥中压力减小,第一蓄能器中液压油补充到系统中,流经第一液压马达后,分别回流到第一双作用液压缸、第二双作用液压缸、第三双作用液压缸和第四双作用液压缸中,液压油流经第一液压马达时,第一液压马达发生转动,通过联轴器带动第一发电机发电;所述第一整流桥和第二整流桥的压力差作用到车身,提供一个抗侧倾的力偶,实现阻碍车身的侧倾;
当车辆电液馈能型互联悬架系统处于所述第二侧倾模态时,所述第一双作用液压缸压缩,所述第二双作用液压缸压缩,所述第三双作用液压缸拉伸,所述第四双作用液压缸拉伸,所述第一三位四通电磁换向阀和第二三位四通电磁换向阀通过模式切换控制器控制,均移向左位;
所述第一双作用液压缸压缩,导致第一双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第一整流分路中;第一整流分路中液压油经过第二单向阀流入第一馈能分路中;
所述第二双作用液压缸压缩,导致第二双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第二三位四通电磁换向阀中;液压油从第二三位四通电磁换向阀的P口流入,A口流出;从第二三位四通电磁换向阀流出的液压油通过液压管路流入第三整流分路中;第三整流分路中液压油经过第六单向阀流入第一馈能分路中;
所述第三双作用液压缸拉伸,导致第三双作用液压缸的下腔体积减小,使下腔的液压油通过液压管路流入第四整流分路中;第四整流分路中液压油经过第八单向阀流入第一馈能分路中;
所述第四双作用液压缸拉伸,导致第四双作用液压缸的下腔体积减小,使下腔液压油通过液压管路流入第一三位四通电磁换向阀;液压油从第一三位四通电磁换向阀的B口流入,T口流出;从第一三位四通电磁换向阀流出的液压油通过液压管路流入第二整流分路中;第二整流分路中液压油经过第四单向阀流入第一馈能分路中;
所述第一馈能分路中因液压油流入导致压力增大,当压力达到第一蓄能器的工作压力时,第一馈能分路中液压油流入第一蓄能器中,压缩气室内体积,使压力达到平衡;所述第二整流桥中压力减小,第二蓄能器中液压油补充到系统中,流经第二液压马达后,分别回流到第一双作用液压缸、第二双作用液压缸、第三双作用液压缸和第四双作用液压缸中,液压油流经第二液压马达时,第二液压马达发生转动,通过联轴器带动第二发电机发电;所述第一整流桥和第二整流桥的压力差作用到车身,提供一个抗侧倾的力偶,实现阻碍车身的侧倾。
上述的一种车辆电液馈能型互联悬架系统的控制方法,所述俯仰模式包括第一俯仰模态和第二俯仰模态;
当车辆电液馈能型互联悬架系统处于所述第一俯仰模态时,所述第一双作用液压缸压缩,所述第二双作用液压缸拉伸,所述第三双作用液压缸拉伸,所述第四双作用液压缸压缩,所述第一三位四通电磁换向阀和第二三位四通电磁换向阀通过模式切换控制器控制,均移向右位;
所述第一双作用液压缸压缩,导致第一双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第一整流分路中;第一整流分路中液压油经过第二单向阀流入第一馈能分路中;
所述第二双作用液压缸拉伸,导致第二双作用液压缸的下腔体积减小,使下腔液压油通过液压管路流入第二三位四通电磁换向阀中;液压油从第二三位四通电磁换向阀的T口流入,A口流出;从第二三位四通电磁换向阀流出的液压油通过液压管路流入第三整流分路中;第三整流分路中液压油经过第六单向阀流入第一馈能分路中;
所述第三双作用液压缸拉伸,导致第三双作用液压缸的下腔体积减小,使下腔的液压油通过液压管路流入第四整流分路中;第四整流分路中液压油经过第八单向阀流入第一馈能分路中;
所述第四双作用液压缸压缩,导致第四双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第一三位四通电磁换向阀;液压油从第一三位四通电磁换向阀的A口流入,T口流出;从第一三位四通电磁换向阀流出的液压油通过液压管路流入第二整流分路中;第二整流分路中液压油经过第四单向阀流入第一馈能分路中;
所述第一馈能分路中因液压油流入导致压力增大,当压力达到第一蓄能器的工作压力时,第一馈能分路中液压油流入第一蓄能器中,压缩气室内体积,使压力达到平衡;所述第二整流桥中压力减小,第二蓄能器中液压油补充到系统中,流经第二液压马达后,分别回流到第一双作用液压缸、第二双作用液压缸、第三双作用液压缸和第四双作用液压缸中,液压油流经第二液压马达时,第二液压马达发生转动,通过联轴器带动第二发电机发电;所述第一整流桥和第二整流桥的压力差作用到车身,提供一个抗俯仰的力偶,实现阻碍车身的俯仰;
当车辆电液馈能型互联悬架系统处于所述第二俯仰模态时,所述第一双作用液压缸拉伸,所述第二双作用液压缸压缩,所述第三双作用液压缸压缩,所述第四双作用液压缸拉伸,所述第一三位四通电磁换向阀和第二三位四通电磁换向阀通过模式切换控制器控制,均移向右位;
所述第一双作用液压缸拉伸,导致第一双作用液压缸的下腔体积减小,使下腔的液压油通过液压管路流入第六整流分路中;第六整流分路中液压油经过第十一单向阀流入第二馈能分路中;
所述第二双作用液压缸压缩,导致第二双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第二三位四通电磁换向阀中;液压油从第二三位四通电磁换向阀的P口流入,B口流出;从第二三位四通电磁换向阀流出的液压油通过液压管路流入第八整流分路中;第八整流分路中液压油经过第十五单向阀流入第二馈能分路中;
所述第三双作用液压缸压缩,导致第三双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第七整流分路中;第七整流分路中液压油经过第十三单向阀流入第二馈能分路中;
所述第四双作用液压缸拉伸,导致第四双作用液压缸的下腔体积减小,使下腔液压油通过液压管路流入第一三位四通电磁换向阀;液压油从第一三位四通电磁换向阀的B口流入,P口流出;从第一三位四通电磁换向阀流出的液压油通过液压管路流入第五整流分路中;第五整流分路中液压油经过第九单向阀流入第二馈能分路中;
所述第二馈能分路中因液压油流入导致压力增大,当压力达到第二蓄能器的工作压力时,第二馈能分路中液压油流入第二蓄能器中,压缩气室内体积,使压力达到平衡;所述第一整流桥中压力减小,第一蓄能器中液压油补充到系统中,流经第一液压马达后,分别回流到第一双作用液压缸、第二双作用液压缸、第三双作用液压缸和第四双作用液压缸中,液压油流经第一液压马达时,第一液压马达发生转动,通过联轴器带动第一发电机发电;所述第一整流桥和第二整流桥的压力差作用到车身,提供一个抗俯仰的力偶,实现阻碍车身的俯仰。
上述的一种车辆电液馈能型互联悬架系统的控制方法,所述常规模式包括第一常规模态和第二常规模态;
当车辆电液馈能型互联悬架系统处于所述第一常规模态时,所述第一双作用液压缸压缩,所述第二双作用液压缸拉伸,所述第三双作用液压缸压缩,所述第四双作用液压缸拉伸,所述第一三位四通电磁换向阀和第二三位四通电磁换向阀通过模式切换控制器控制,均处于中位;
所述第一双作用液压缸压缩,导致第一双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第一整流分路中;第一整流分路中液压油经过第二单向阀流入第一馈能分路中;
所述第二双作用液压缸拉伸,导致第二双作用液压缸的下腔体积减小,使下腔液压油通过液压管路流入第二三位四通电磁换向阀中;液压油从第二三位四通电磁换向阀的T口流入,B口流出;从第二三位四通电磁换向阀流出的液压油通过液压管路流入第八整流分路中;第八整流分路中液压油经过第十五单向阀流入第二馈能分路中;
所述第三双作用液压缸压缩,导致第三双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第七整流分路中;第七整流分路中液压油经过第十三单向阀流入第二馈能分路中;
所述第四双作用液压缸拉伸,导致第四双作用液压缸的下腔体积减小,使下腔液压油通过液压管路流入第一三位四通电磁换向阀;液压油从第一三位四通电磁换向阀的B口流入,T口流出;从第一三位四通电磁换向阀流出的液压油通过液压管路流入第二整流分路中;第二整流分路中液压油经过第四单向阀流入第一馈能分路中;
所述第一馈能分路中液压油因压差作用流经第一液压马达后,分别通过第五单向阀补充到第二双作用液压缸的上腔中,通过第七单向阀补充到第三双作用液压缸的下腔中;所述第二馈能分路中液压油因压差作用流经第二液压马达后,分别通过第十单向阀补充到第四双作用液压缸的上腔中,通过第十二单向阀补充到第一双作用液压缸的下腔中;
当车辆电液馈能型互联悬架系统处于所述第二常规模态时,所述第一双作用液压缸、第二双作用液压缸、第三双作用液压缸和第四双作用液压缸均压缩,所述第一三位四通电磁换向阀和第二三位四通电磁换向阀通过模式切换控制器控制,均处于中位;
所述第一双作用液压缸压缩,导致第一双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第一整流分路中;第一整流分路中液压油经过第二单向阀流入第一馈能分路中;
所述第二双作用液压缸压缩,导致第二双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第二三位四通电磁换向阀中;液压油从第二三位四通电磁换向阀的P口流入,A口流出;从第二三位四通电磁换向阀流出的液压油通过液压管路流入第三整流分路中;第三整流分路中液压油经过第六单向阀流入第一馈能分路中;
所述第三双作用液压缸压缩,导致第三双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第七整流分路中;第七整流分路中液压油经过第十三单向阀流入第二馈能分路中;
所述第四双作用液压缸压缩,导致第四双作用液压缸的上腔体积减小,使上腔液压油通过液压管路流入第一三位四通电磁换向阀;液压油从第一三位四通电磁换向阀的A口流入,P口流出;从第一三位四通电磁换向阀流出的液压油通过液压管路流入第五整流分路中;第五整流分路中液压油经过第九单向阀流入第二馈能分路中;
所述第一馈能分路中液压油因压差作用流经第一液压马达后,分别通过第三单向阀补充到第四双作用液压缸的下腔中,通过第七单向阀补充到第三双作用液压缸的下腔中;所述第二馈能分路中液压油因压差作用流经第二液压马达后,分别通过第十二单向阀补充到第一双作用液压缸的下腔中,通过第十五单向阀补充到第二双作用液压缸的下腔中;
在车辆电液馈能型互联悬架系统处于第一常规模态和第二常规模态过程中,随着车辆行驶,所述第一双作用液压缸、第二双作用液压缸、第三双作用液压缸和第四双作用液压缸工作,使液压油流动,液压油的流动不会造成第一整流桥和第二整流桥的压力变化,悬架系统的刚度也不会因液压油的流动而发生改变;同时,液压油的流动带动第一液压马达和第二液压马达单向转动,进而带动第一发电机和第二发电机发电,实现回收来自路面激励的能量。
本发明与现有技术相比具有以下优点:
1、本发明的系统结构简单,设计合理,实现方便。
2、本发明通过第一整流桥和第二整流桥的整流作用,将第一液压马达和第二液压马达的双向转动改变为单向转动,提高了第一液压马达和第二液压马达以及第一发电机和第二发电机的使用寿命,第一液压马达和第二液压马达的单向转动使系统反应更加及时,减轻了由于电机双向转动导致的液压冲击,提高了汽车行驶的平顺性,且提高馈能效率。
3、本发明通过第一蓄能器和第二蓄能器的作用,能够吸收液压系统的冲击,提高汽车行驶的的平顺性,可以将液压管路中的压力、液压油的流速维持在一个稳定范围内,使第一液压马达和第二液压马达维持在一个稳定的转速区间,减少了对第一液压马达和第二液压马达的冲击,提高使用寿命,使第一发电机和第二发电机高效率产生较为稳定的馈能电压,防止馈能电路中零件被高的瞬时电压击穿,提高使用寿命和可靠度。
4、本发明悬架系统的工作模式分为抗侧倾模式、抗俯仰模式和常规模式,根据车辆行驶的路面情况、行驶速度和行驶状态,通过模式切换控制器进行提前切换,提高了车辆的操稳性,在极限驾驶工况下,提高了车辆行驶的安全性。
5、本发明能够通过调节第一发电机和第二发电机的反电动势,实现车辆的半主动控制,能够根据不同的行驶工况,提供不同的阻尼力,提高车辆行驶的平顺性。
6、本发明通过设计能量回收单元,将路面的激励能量进行回收再利用,在全工况下,均可实现能量回收,极大的减少了能源的浪费。
7、本发明能够广泛应用在各种类型的车辆中,在提高车辆操稳性、平顺性和安全性的同时,节约了能源,使用效果好,便于推广使用。
综上所述,本发明的系统结构简单,设计合理,实现方便,能够广泛应用在各种类型的车辆中,结合控制方法,在提高车辆操稳性、平顺性和安全性的同时,节约了能源,使用效果好,便于推广使用。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
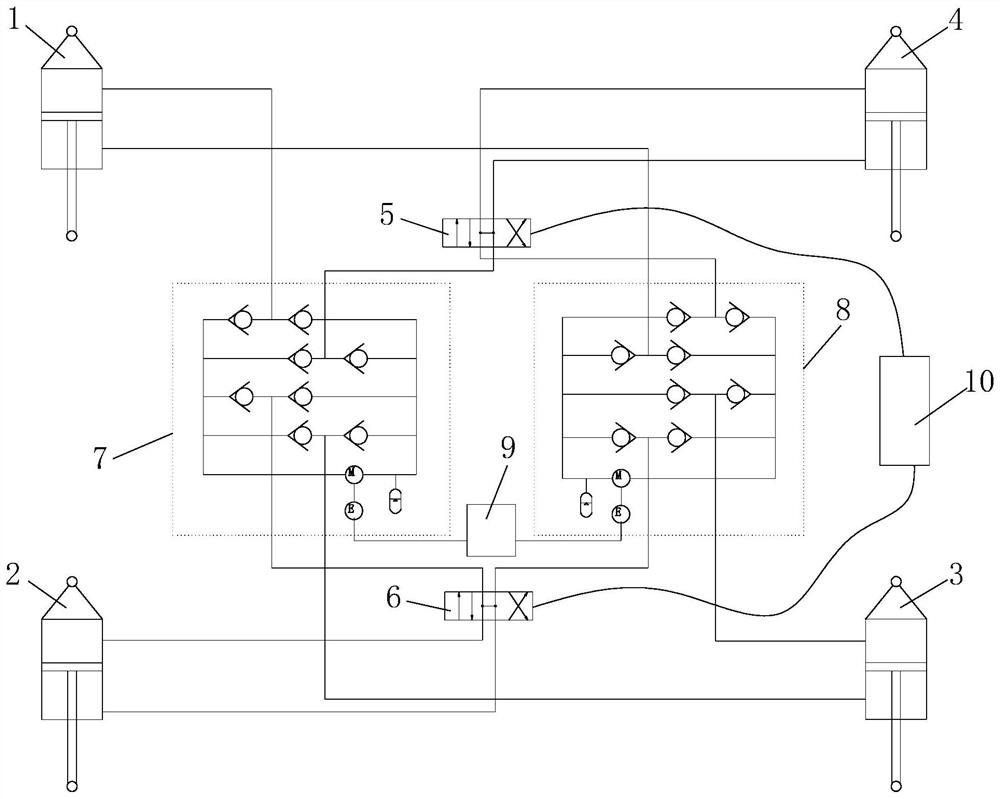
图1为本发明的系统组成示意图;
图2为本发明第一整流桥的组成示意图;
图3为本发明第二整流桥的组成示意图;
图4为本发明能量回收单元的原理框图。
附图标记说明:
1—第一双作用液压缸; 2—第二双作用液压缸; 3—第三双作用液压缸;
4—第四双作用液压缸; 5—第一三位四通电磁换向阀;
6—第二三位四通电磁换向阀; 7—第一整流桥;
7-1—第一整流分路; 7-2—第二整流分路; 7-3—第三整流分路;
7-4—第四整流分路; 7-5—第一馈能分路; 7-6—第一单向阀;
7-7—第二单向阀; 7-8—第三单向阀; 7-9—第四单向阀;
7-10—第五单向阀; 7-11—第六单向阀; 7-12—第七单向阀;
7-13—第八单向阀; 7-14—第一蓄能器; 7-15—第一液压马达;
7-16—第一发电机; 8—第二整流桥; 8-1—第五整流分路;
8-2—第六整流分路; 8-3—第七整流分路; 8-4—第八整流分路;
8-5—第二馈能分路; 8-6—第九单向阀; 8-7—第十单向阀;
8-8—第十一单向阀; 8-9—第十二单向阀; 8-10—第十三单向阀;
8-11—第十四单向阀; 8-12—第十五单向阀; 8-13—第十六单向阀;
8-14—第二蓄能器; 8-15—第二液压马达; 8-16—第二发电机;
9—能量回收单元; 9-1—超级电容; 9-2—蓄电池;
9-3—DSP处理器; 9-4—第一MOSFET模块; 9-5—第二MOSFET模块;
9-6—电压传感器; 9-7—第一升降压模块; 9-8—整流分压模块;
9-9—均压电路模块; 9-10—第二升降压模块; 9-11—稳压电路模块;
9-12—二极管; 10—模式切换控制器。
具体实施方式
如图1所示,本发明的车辆电液馈能型互联悬架系统,包括均连接在车辆簧载质量上的第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4,以及第一三位四通电磁换向阀5、第二三位四通电磁换向阀6、第一整流桥7、第二整流桥8、能量回收单元9和模式切换控制器10;所述第一双作用液压缸1的上腔与第一整流桥7连接,第一双作用液压缸1的下腔与第二整流桥8连接,所述第二双作用液压缸2的上腔通过第二三位四通电磁换向阀6与第一整流桥7连接,所述第二双作用液压缸2的下腔通过第二三位四通电磁换向阀6与第二整流桥8连接,所述第三双作用液压缸3的上腔与第二整流桥8连接,所述第三双作用液压缸3的下腔与第一整流桥7连接,所述第四双作用液压缸4的上腔通过第一三位四通电磁换向阀5与第二整流桥8连接,所述第四双作用液压缸4的下腔通过第一三位四通电磁换向阀5与第一整流桥7连接,所述第一整流桥7和第二整流桥8均与能量回收单元9连接,所述第一三位四通电磁换向阀5和第二三位四通电磁换向阀6均与模式切换控制器10连接。
本实施例中,如图2所示,所述第一整流桥7包括第一整流分路7-1、第二整流分路7-2、第三整流分路7-3、第四整流分路7-4和第一馈能分路7-5,所述第一整流分路7-1、第二整流分路7-2、第三整流分路7-3、第四整流分路7-4和第一馈能分路7-5相互并行连接,所述第一整流分路7-1上设置有第一单向阀7-6和第二单向阀7-7,所述第二整流分路7-2上设置有第三单向阀7-8和第四单向阀7-9,所述第三整流分路7-3上设置有第五单向阀7-10和第六单向阀7-11,所述第四整流分路7-4上设置有第七单向阀7-12和第八单向阀7-13,所述第一馈能分路7-5上随液压油流动方向依次设置有第一蓄能器7-14与第一液压马达7-15,所述第一液压马达7-15上连接有第一发电机7-16;
如图3所示,所述第二整流桥8包括第五整流分路8-1、第六整流分路8-2、第七整流分路8-3、第八整流分路8-4和第二馈能分路8-5,所述第五整流分路8-1、第六整流分路8-2、第七整流分路8-3、第八整流分路8-4和第二馈能分路8-5相互并行连接,所述第五整流分路8-1上设置有第九单向阀8-6和第十单向阀8-7,所述第六整流分路8-2上设置有第十一单向阀8-8和第十二单向阀8-9,所述第七整流分路8-3上设置有第十三单向阀8-10和第十四单向阀8-11,所述第八整流分路8-4上设置有第十五单向阀8-12和第十六单向阀8-13,所述第二馈能分路8-5上随液压油流动方向依次设置有第二蓄能器8-14与第二液压马达8-15,所述第二液压马达8-15上连接有第二发电机8-16。
具体实施时,第一整流桥7中第一单向阀7-6、第二单向阀7-7、第三单向阀7-8、第四单向阀7-9、第五单向阀7-10、第六单向阀7-11、第七单向阀7-12和第八单向阀7-13同向设置,第一双作用液压缸1的上腔通过液压管路与第一整流分路7-1连接,具体连接在第一单向阀7-6和第二单向阀7-7之间,第二双作用液压缸2的上腔通过液压管路与第二三位四通电磁换向阀6的P口连接,第二三位四通电磁换向阀6的A口通过液压管路与第三整流分路7-3连接,具体连接在第五单向阀7-10和第六单向阀7-11之间,第三双作用液压缸3的下腔通过液压管路与第四整流分路7-4连接,具体连接在第七单向阀7-12和第八单向阀7-13之间,第四双作用液压缸4的下腔通过液压管路与第一三位四通电磁换向阀5的B口连接,第一三位四通电磁换向阀5的T口通过液压管路与第二整流分路7-2连接,具体连接在第三单向阀7-8和第四单向阀7-9之间;第一整流分路7-1、第二整流分路7-2、第三整流分路7-3和第四整流分路7-4流出的液压油均流入第一馈能分路7-5中,当液压油流经第一液压马达7-15时,第一液压马达7-15转动,进而通过联轴器带动第一发电机7-16转动,产生电动势;第一馈能分路7-5流出的液压油回流到第一整流分路7-1、第二整流分路7-2、第三整流分路7-3和第四整流分路7-4中,进而回流到第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4中。
第二整流桥8中第九单向阀8-6、第十单向阀8-7、第十一单向阀8-8、第十二单向阀8-9、第十三单向阀8-10、第十四单向阀8-11、第十五单向阀8-12和第十六单向阀8-13同向设置,第一双作用液压缸1的下腔通过液压管路与第六整流分路8-2连接,具体连接在第十一单向阀8-8和第十二单向阀8-9之间,第二双作用液压缸2的下腔通过液压管路与第二三位四通电磁换向阀6的T口连接,第二三位四通电磁换向阀6的B口通过液压管路与第八整流分路8-4连接,具体连接在第十五单向阀8-12和第十六单向阀8-13之间,第三双作用液压缸3的上腔通过液压管路与第七整流分路8-3连接,具体连接在第十三单向阀8-10和第十四单向阀8-11之间,第四双作用液压缸4的上腔通过液压管路与第一三位四通电磁换向阀5的A口连接,第一三位四通电磁换向阀5的P口通过液压管路与第五整流分路8-1连接,具体连接在第九单向阀8-6和第十单向阀8-7之间;第五整流分路8-1、第六整流分路8-2、第七整流分路8-3和第八整流分路8-4流出的液压油均流入第二馈能分路8-5中,当液压油流经第二液压马达8-15时,第二液压马达8-15转动,进而通过联轴器带动第二发电机8-16转动,产生电动势;第二馈能分路8-5流出的液压油回流到第五整流分路8-1、第六整流分路8-2、第七整流分路8-3和第八整流分路8-4中,进而回流到第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4中。
本实施例中,所述第一蓄能器7-14和第二蓄能器8-14中预充气体均为氮气,预充气压力为10bar,体积为0.65L;所述第一单向阀7-6、第三单向阀7-8、第五单向阀7-10、第七单向阀7-12、第十单向阀8-7、第十二单向阀8-9、第十四单向阀8-11和第十六单向阀8-13的开启压力均为0.4bar,所述第二单向阀7-7、第四单向阀7-9、第六单向阀7-11、第八单向阀7-13、第九单向阀8-6、第十一单向阀8-8、第十三单向阀8-10和第十五单向阀8-12的开启压力均为3.5bar。
本实施例中,如图4所示,所述能量回收单元9包括超级电容9-1、蓄电池9-2和DSP处理器9-3,所述DSP处理器9-3的输出端接有第一MOSFET模块9-4和第二MOSFET模块9-5,所述DSP处理器9-3的输入端接有用于实时检测超级电容9-1端电压的电压传感器9-6,所述第一MOSFET模块9-4的输入端接有第一升降压模块9-7,所述第一升降压模块9-7的输入端接有整流分压模块9-8,所述第一发电机7-16和第二发电机8-16均与整流分压模块9-8的输入端连接,所述第一MOSFET模块9-4的输出端通过均压电路模块9-9与超级电容9-1连接,所述超级电容9-1与第二MOSFET模块9-5的输入端连接,所述第二MOSFET模块9-5的输出端接有第二升降压模块9-10,所述第二升降压模块9-10的输出端接有稳压电路模块9-11,所述蓄电池9-2通过二极管9-12与稳压电路模块9-11的输出端连接。
本发明的车辆电液馈能型互联悬架系统的控制方法,包括车辆运行过程中电液馈能型互联悬架的工作模式切换方法和电液馈能型互联悬架的能量回收方法;
所述工作模式切换方法的具体步骤包括:
步骤A1、路面信息采集与传输;
通过车载摄像头和车载雷达对车前路面进行预瞄识别,车载摄像头将采集到的图像信息传输到图像处理器中,车载雷达将采集的距离信息传输到车载ECU中;
步骤A2、图像信息处理与传输;
图像处理器采用卷积神经网络对道路标线及障碍物进行图像识别,对道路标线进行拟合,并根据障碍物及道路曲率进一步计算出预判转弯半径R,图像处理器将数据结果传输到车载ECU中;
步骤A3、数据处理与切换控制;
步骤A301、车载ECU根据公式
步骤A302、车载ECU根据公式
步骤A303、车载ECU根据公式
步骤A304、根据车载ECU获取的数据和车辆到达障碍物时间t,通过模式切换控制器10提前一段时间进行模式切换;返回步骤A1。
所述能量回收方法的具体步骤包括:
步骤B1、所述电压传感器9-6对超级电容9-1的端电压进行实时检测,并将端电压检测值U
步骤B2、所述DSP处理器9-3对端电压检测值U
步骤B3、所述超级电容9-1释能,具体过程为:
所述DSP处理器9-3输出PWM1和PWM2两路信号,其中,PWM1为低电平信号,使第一MOSFET模块9-4打开,PWM2为高电平信号,使第二MOSFET模块9-5闭合,超级电容9-1放电,超级电容9-1释放的电能依次通过第二升降压模块9-10和稳压电路模块9-11后,产生稳定的充电电压,再经过二极管9-12对蓄电池9-2进行充电,超级电容9-1的端电压逐渐降低,返回步骤B1;
具体实施时,二极管9-12用于防止电流反向流动。
步骤B4、所述超级电容9-1充能,具体过程为:
所述DSP处理器9-3输出PWM1和PWM2两路信号,其中,PWM1为高电平信号,使第一MOSFET模块9-4闭合,PWM2为低电平信号,使第二MOSFET模块9-5打开,超级电容9-1充电,第一发电机7-16和第二发电机8-16产生的电能依次通过整流分压模块9-8、第一升降压模块9-7和均压电路模块9-9后,得到稳定的充电电压,对超级电容9-1进行充电,超级电容9-1的端电压逐渐上升,返回步骤B1;
步骤B5、所述超级电容9-1静置,所述DSP处理器9-3不输出信号,返回步骤B1。
本实施例中,步骤A304中所述根据车载ECU获取的数据和车辆到达障碍物时间t,通过模式切换控制器10提前一段时间进行模式切换的具体过程包括:
步骤A30401、当预判转弯半径R大于等于转弯半径设置值R
步骤A30402、当预判向心加速度a
步骤A30403、当预判切向加速度a
具体实施时,模式切换控制器10提前1s~3s进行模式切换。
本实施例中,所述侧倾模式包括第一侧倾模态和第二侧倾模态;
当车辆电液馈能型互联悬架系统处于所述第一侧倾模态时,所述第一双作用液压缸1拉伸,所述第二双作用液压缸2拉伸,所述第三双作用液压缸3压缩,所述第四双作用液压缸4压缩,所述第一三位四通电磁换向阀5和第二三位四通电磁换向阀6通过模式切换控制器10控制,均移向左位;
所述第一双作用液压缸1拉伸,导致第一双作用液压缸1的下腔体积减小,使下腔的液压油通过液压管路流入第六整流分路8-2中;第六整流分路8-2中液压油经过第十一单向阀8-8流入第二馈能分路8-5中;
所述第二双作用液压缸2拉伸,导致第二双作用液压缸2的下腔体积减小,使下腔液压油通过液压管路流入第二三位四通电磁换向阀6中;液压油从第二三位四通电磁换向阀6的T口流入,B口流出;从第二三位四通电磁换向阀6流出的液压油通过液压管路流入第八整流分路8-4中;第八整流分路8-4中液压油经过第十五单向阀8-12流入第二馈能分路8-5中;
所述第三双作用液压缸3压缩,导致第三双作用液压缸3的上腔体积减小,使上腔液压油通过液压管路流入第七整流分路8-3中;第七整流分路8-3中液压油经过第十三单向阀8-10流入第二馈能分路8-5中;
所述第四双作用液压缸4压缩,导致第四双作用液压缸4的上腔体积减小,使上腔液压油通过液压管路流入第一三位四通电磁换向阀5;液压油从第一三位四通电磁换向阀5的A口流入,P口流出;从第一三位四通电磁换向阀5流出的液压油通过液压管路流入第五整流分路8-1中;第五整流分路8-1中液压油经过第九单向阀8-6流入第二馈能分路8-5中;
所述第二馈能分路8-5中因液压油流入导致压力增大,当压力达到第二蓄能器8-14的工作压力时,第二馈能分路8-5中液压油流入第二蓄能器8-14中,压缩气室内体积,使压力达到平衡;
所述第一整流桥7中压力减小,第一蓄能器7-14中液压油补充到系统中,流经第一液压马达7-15后,分别回流到第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4中,液压油流经第一液压马达7-15时,第一液压马达7-15发生转动,通过联轴器带动第一发电机7-16发电;
所述第一整流桥7和第二整流桥8的压力差作用到车身,提供一个抗侧倾的力偶,实现阻碍车身的侧倾;
当车辆电液馈能型互联悬架系统处于所述第二侧倾模态时,所述第一双作用液压缸1压缩,所述第二双作用液压缸2压缩,所述第三双作用液压缸3拉伸,所述第四双作用液压缸4拉伸,所述第一三位四通电磁换向阀5和第二三位四通电磁换向阀6通过模式切换控制器10控制,均移向左位;
所述第一双作用液压缸1压缩,导致第一双作用液压缸1的上腔体积减小,使上腔液压油通过液压管路流入第一整流分路7-1中;第一整流分路7-1中液压油经过第二单向阀7-7流入第一馈能分路7-5中;
所述第二双作用液压缸2压缩,导致第二双作用液压缸2的上腔体积减小,使上腔液压油通过液压管路流入第二三位四通电磁换向阀6中;液压油从第二三位四通电磁换向阀6的P口流入,A口流出;从第二三位四通电磁换向阀6流出的液压油通过液压管路流入第三整流分路7-3中;第三整流分路7-3中液压油经过第六单向阀7-11流入第一馈能分路7-5中;
所述第三双作用液压缸3拉伸,导致第三双作用液压缸3的下腔体积减小,使下腔的液压油通过液压管路流入第四整流分路7-4中;第四整流分路7-4中液压油经过第八单向阀7-13流入第一馈能分路7-5中;
所述第四双作用液压缸4拉伸,导致第四双作用液压缸4的下腔体积减小,使下腔液压油通过液压管路流入第一三位四通电磁换向阀5;液压油从第一三位四通电磁换向阀5的B口流入,T口流出;从第一三位四通电磁换向阀5流出的液压油通过液压管路流入第二整流分路7-2中;第二整流分路7-2中液压油经过第四单向阀7-9流入第一馈能分路7-5中;
所述第一馈能分路7-5中因液压油流入导致压力增大,当压力达到第一蓄能器7-14的工作压力时,第一馈能分路7-5中液压油流入第一蓄能器7-14中,压缩气室内体积,使压力达到平衡;
所述第二整流桥8中压力减小,第二蓄能器8-14中液压油补充到系统中,流经第二液压马达8-15后,分别回流到第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4中,液压油流经第二液压马达8-15时,第二液压马达8-15发生转动,通过联轴器带动第二发电机8-16发电;
所述第一整流桥7和第二整流桥8的压力差作用到车身,提供一个抗侧倾的力偶,实现阻碍车身的侧倾。
本实施例中,所述俯仰模式包括第一俯仰模态和第二俯仰模态;
当车辆电液馈能型互联悬架系统处于所述第一俯仰模态时,所述第一双作用液压缸1压缩,所述第二双作用液压缸2拉伸,所述第三双作用液压缸3拉伸,所述第四双作用液压缸4压缩,所述第一三位四通电磁换向阀5和第二三位四通电磁换向阀6通过模式切换控制器10控制,均移向右位;
所述第一双作用液压缸1压缩,导致第一双作用液压缸1的上腔体积减小,使上腔液压油通过液压管路流入第一整流分路7-1中;第一整流分路7-1中液压油经过第二单向阀7-7流入第一馈能分路7-5中;
所述第二双作用液压缸2拉伸,导致第二双作用液压缸2的下腔体积减小,使下腔液压油通过液压管路流入第二三位四通电磁换向阀6中;液压油从第二三位四通电磁换向阀6的T口流入,A口流出;从第二三位四通电磁换向阀6流出的液压油通过液压管路流入第三整流分路7-3中;第三整流分路7-3中液压油经过第六单向阀7-11流入第一馈能分路7-5中;
所述第三双作用液压缸3拉伸,导致第三双作用液压缸3的下腔体积减小,使下腔的液压油通过液压管路流入第四整流分路7-4中;第四整流分路7-4中液压油经过第八单向阀7-13流入第一馈能分路7-5中;
所述第四双作用液压缸4压缩,导致第四双作用液压缸4的上腔体积减小,使上腔液压油通过液压管路流入第一三位四通电磁换向阀5;液压油从第一三位四通电磁换向阀5的A口流入,T口流出;从第一三位四通电磁换向阀5流出的液压油通过液压管路流入第二整流分路7-2中;第二整流分路7-2中液压油经过第四单向阀7-9流入第一馈能分路7-5中;
所述第一馈能分路7-5中因液压油流入导致压力增大,当压力达到第一蓄能器7-14的工作压力时,第一馈能分路7-5中液压油流入第一蓄能器7-14中,压缩气室内体积,使压力达到平衡;
所述第二整流桥8中压力减小,第二蓄能器8-14中液压油补充到系统中,流经第二液压马达8-15后,分别回流到第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4中,液压油流经第二液压马达8-15时,第二液压马达8-15发生转动,通过联轴器带动第二发电机8-16发电;
所述第一整流桥7和第二整流桥8的压力差作用到车身,提供一个抗俯仰的力偶,实现阻碍车身的俯仰;
当车辆电液馈能型互联悬架系统处于所述第二俯仰模态时,所述第一双作用液压缸1拉伸,所述第二双作用液压缸2压缩,所述第三双作用液压缸3压缩,所述第四双作用液压缸4拉伸,所述第一三位四通电磁换向阀5和第二三位四通电磁换向阀6通过模式切换控制器10控制,均移向右位;
所述第一双作用液压缸1拉伸,导致第一双作用液压缸1的下腔体积减小,使下腔的液压油通过液压管路流入第六整流分路8-2中;第六整流分路8-2中液压油经过第十一单向阀8-8流入第二馈能分路8-5中;
所述第二双作用液压缸2压缩,导致第二双作用液压缸2的上腔体积减小,使上腔液压油通过液压管路流入第二三位四通电磁换向阀6中;液压油从第二三位四通电磁换向阀6的P口流入,B口流出;从第二三位四通电磁换向阀6流出的液压油通过液压管路流入第八整流分路8-4中;第八整流分路8-4中液压油经过第十五单向阀8-12流入第二馈能分路8-5中;
所述第三双作用液压缸3压缩,导致第三双作用液压缸3的上腔体积减小,使上腔液压油通过液压管路流入第七整流分路8-3中;第七整流分路8-3中液压油经过第十三单向阀8-10流入第二馈能分路8-5中;
所述第四双作用液压缸4拉伸,导致第四双作用液压缸4的下腔体积减小,使下腔液压油通过液压管路流入第一三位四通电磁换向阀5;液压油从第一三位四通电磁换向阀5的B口流入,P口流出;从第一三位四通电磁换向阀5流出的液压油通过液压管路流入第五整流分路8-1中;第五整流分路8-1中液压油经过第九单向阀8-6流入第二馈能分路8-5中;
所述第二馈能分路8-5中因液压油流入导致压力增大,当压力达到第二蓄能器8-14的工作压力时,第二馈能分路8-5中液压油流入第二蓄能器8-14中,压缩气室内体积,使压力达到平衡;
所述第一整流桥7中压力减小,第一蓄能器7-14中液压油补充到系统中,流经第一液压马达7-15后,分别回流到第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4中,液压油流经第一液压马达7-15时,第一液压马达7-15发生转动,通过联轴器带动第一发电机7-16发电;
所述第一整流桥7和第二整流桥8的压力差作用到车身,提供一个抗俯仰的力偶,实现阻碍车身的俯仰。
本实施例中,所述常规模式包括第一常规模态和第二常规模态;
当车辆电液馈能型互联悬架系统处于所述第一常规模态时,所述第一双作用液压缸1压缩,所述第二双作用液压缸2拉伸,所述第三双作用液压缸3压缩,所述第四双作用液压缸4拉伸,所述第一三位四通电磁换向阀5和第二三位四通电磁换向阀6通过模式切换控制器10控制,均处于中位;
所述第一双作用液压缸1压缩,导致第一双作用液压缸1的上腔体积减小,使上腔液压油通过液压管路流入第一整流分路7-1中;第一整流分路7-1中液压油经过第二单向阀7-7流入第一馈能分路7-5中;
所述第二双作用液压缸2拉伸,导致第二双作用液压缸2的下腔体积减小,使下腔液压油通过液压管路流入第二三位四通电磁换向阀6中;液压油从第二三位四通电磁换向阀6的T口流入,B口流出;从第二三位四通电磁换向阀6流出的液压油通过液压管路流入第八整流分路8-4中;第八整流分路8-4中液压油经过第十五单向阀8-12流入第二馈能分路8-5中;
所述第三双作用液压缸3压缩,导致第三双作用液压缸3的上腔体积减小,使上腔液压油通过液压管路流入第七整流分路8-3中;第七整流分路8-3中液压油经过第十三单向阀8-10流入第二馈能分路8-5中;
所述第四双作用液压缸4拉伸,导致第四双作用液压缸4的下腔体积减小,使下腔液压油通过液压管路流入第一三位四通电磁换向阀5;液压油从第一三位四通电磁换向阀5的B口流入,T口流出;从第一三位四通电磁换向阀5流出的液压油通过液压管路流入第二整流分路7-2中;第二整流分路7-2中液压油经过第四单向阀7-9流入第一馈能分路7-5中;
所述第一馈能分路7-5中液压油因压差作用流经第一液压马达7-15后,分别通过第五单向阀7-10补充到第二双作用液压缸2的上腔中,通过第七单向阀7-12补充到第三双作用液压缸3的下腔中;所述第二馈能分路8-5中液压油因压差作用流经第二液压马达8-15后,分别通过第十单向阀8-7补充到第四双作用液压缸4的上腔中,通过第十二单向阀8-9补充到第一双作用液压缸1的下腔中;
当车辆电液馈能型互联悬架系统处于所述第二常规模态时,所述第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4均压缩,所述第一三位四通电磁换向阀5和第二三位四通电磁换向阀6通过模式切换控制器10控制,均处于中位;
所述第一双作用液压缸1压缩,导致第一双作用液压缸1的上腔体积减小,使上腔液压油通过液压管路流入第一整流分路7-1中;第一整流分路7-1中液压油经过第二单向阀7-7流入第一馈能分路7-5中;
所述第二双作用液压缸2压缩,导致第二双作用液压缸2的上腔体积减小,使上腔液压油通过液压管路流入第二三位四通电磁换向阀6中;液压油从第二三位四通电磁换向阀6的P口流入,A口流出;从第二三位四通电磁换向阀6流出的液压油通过液压管路流入第三整流分路7-3中;第三整流分路7-3中液压油经过第六单向阀7-11流入第一馈能分路7-5中;
所述第三双作用液压缸3压缩,导致第三双作用液压缸3的上腔体积减小,使上腔液压油通过液压管路流入第七整流分路8-3中;第七整流分路8-3中液压油经过第十三单向阀8-10流入第二馈能分路8-5中;
所述第四双作用液压缸4压缩,导致第四双作用液压缸4的上腔体积减小,使上腔液压油通过液压管路流入第一三位四通电磁换向阀5;液压油从第一三位四通电磁换向阀5的A口流入,P口流出;从第一三位四通电磁换向阀5流出的液压油通过液压管路流入第五整流分路8-1中;第五整流分路8-1中液压油经过第九单向阀8-6流入第二馈能分路8-5中;
所述第一馈能分路7-5中液压油因压差作用流经第一液压马达7-15后,分别通过第三单向阀7-8补充到第四双作用液压缸4的下腔中,通过第七单向阀7-12补充到第三双作用液压缸3的下腔中;所述第二馈能分路8-5中液压油因压差作用流经第二液压马达8-15后,分别通过第十二单向阀8-9补充到第一双作用液压缸1的下腔中,通过第十五单向阀8-12补充到第二双作用液压缸2的下腔中;
在车辆电液馈能型互联悬架系统处于第一常规模态和第二常规模态过程中,随着车辆行驶,所述第一双作用液压缸1、第二双作用液压缸2、第三双作用液压缸3和第四双作用液压缸4工作,使液压油流动,液压油的流动不会造成第一整流桥7和第二整流桥8的压力变化,悬架系统的刚度也不会因液压油的流动而发生改变;同时,液压油的流动带动第一液压马达7-15和第二液压马达8-15单向转动,进而带动第一发电机7-16和第二发电机8-16发电,实现回收来自路面激励的能量。
以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
- 一种车辆电液馈能型互联悬架系统及其控制方法
- 一种旁路式馈能型车辆半主动悬架作动器及其控制方法