一种基于扩展二维经验小波变换的工程表面多尺度滤波方法
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及图像处理技术领域,尤其是涉及一种基于扩展二维经验小波变换的工程表面多尺度滤波方法。
背景技术
表面形貌是制造过程中零件与其预期功能行为之间的重要联系。为了满足更严格的公差要求和更高的性能标准,工程师往往需要零件表面质量满足指定的尺寸、形状和峰值等各种表面功能属性。工程表面的表面形貌存在多尺度性,由三个波长范围的成分组成,其中较长的波长成分是形状误差,而较短的波长成分是粗糙度,波纹度是中等波长成分,介于形状误差和粗糙度之间。不同尺度的表面成分具有不同的来源,并且以不同的方式影响零件的功能,如振动、刀具磨损、颤振和密封。因此,实现表面的多尺度滤波对工程表面形貌分析具有重要意义。
滤波技术是将表面分离成形状误差、波纹度和粗糙度的过程,也一直是表面形貌分析方面的研究热点。2RC滤波器和高斯滤波器是最早提出的滤波技术,且高斯滤波器仍被视为当前的标准滤波器。作为非线性和非平稳信号处理工具,小波变换和经验模态分解逐渐用于工程表面分析。与传统的滤波方法不同,它们具有多尺度几何结构,可以将给定的表面形貌划分为一系列频率分量,每个分量都与其尺度相匹配,分离的频率分量的数量多于三个,能更好地反映更精细的表面信息。已有技术中,Jerome Gilles在论文“EmpiricalWavelet Transform”(IEEE Transactions on Signal Processing.2013;61:3999-4010)中提出经验小波变换 (EWT)方法,它继承了小波变换和经验模态分解的滤波特性,不仅克服了小波滤波在小波基上的非自适应性,而且填补了经验模态分解的理论基础,避免了经验模态分解滤波的模态混叠,但EWT缺乏对表面各尺度成分的表征。
近年来出现的高清晰测量技术综合了接触式测量技术测量范围大和非接触式测量技术采样密度高的优点,能够为零件加工表面预测复现更为清晰的表面形貌。专利号为CN103544694A名称为“零件表面形貌三维高密度点云数据转化为灰度图像的方法”的中国专利,提出了把测量点云转化为灰度图像的方法,为后续表面多尺度滤波提供了新的数据基础。
发明内容
为了克服传统滤波方法中拟合误差、末端效应和模态混叠的缺点,弥补EWT无法表面成分表征的不足,本发明提出了一种基于扩展二维经验小波变换(Extended Bi-dimensional Empirical Wavelet Transform,EBEWT)的工程表面多尺度滤波方法。本发明基于自适应尺度空间表示技术和Riesz变换,扩展了原始的二维经验小波变换,建立了每个提取的固有模态函数与其物理尺寸之间的关系,实现工程表面各尺度成分的表征和滤波,从而指示制造过程和零件功能的不规则性。
为了实现上述目的,本发明采用以下技术方案:
一种基于扩展二维经验小波变换的工程表面多尺度滤波方法,所述方法包括下述步骤:
(1)生成灰度图像:对测量后的零件表面形貌三维高密度点云数据进行处理,生成能够反映表面形貌高度值的灰度图像;
(2)获得去全局趋势的频谱:通过伪极快速傅里叶变换和多项式拟合得到;
(3)自适应频谱分割:通过尺度空间表示技术生成频谱的尺度空间平面,并找出全部有意义的模态;
(4)二维经验小波分解:建立二维小波滤波器组,得到经验模态函数;
(5)经验模态函数合并:将波长符合特定表面成分的经验模态函数进行合并;
(6)表面成分重构:利用二维经验小波的逆变换,将合并后的经验模态函数分别进行重构,从而将工程表面分离为形状误差F(x,y)、波纹度W(x,y)和粗糙度R(x,y)。
本发明整个方法步骤的编程语言为MATLAB,本发明解决了传统滤波方法中拟合误差、末端效应和模态混叠的问题,实现了工程表面各尺度成分的准确分离,为后续建立表面成分和加工工艺系统、零件性能的映射关系等工作的开展提供了基础。
作为优选,所述步骤(1)中,生成灰度图像的具体过程为:通过将三维高密度点云数据中反映零件表面形貌的高度值映射为像素的灰度值,把高清晰测量点云数据转化为灰度图像。
作为优选,所述步骤(2)中,获得去全局趋势的频谱的具体过程为:通过伪极快速傅里叶变换,计算工程表面灰度图像的均值频谱F
作为优选,所述步骤(3)中,所述自适应频谱分割的具体过程为:通过尺度空间表示技术,生成频谱GF
作为优选,尺度空间平面为L(ω,t)=g(ω;t)*GF
作为优选,所述步骤(4)中,二维经验小波分解的具体过程为:根据频谱边界集合Ω={ω
作为优选,φ
作为优选,所述步骤(5)中,经验模态函数合并的过程为:通过Riesz变换,构建每个经验模态函数的单演信号f
作为优选,所述Riesz变换为:经验模态函数f
对每个经验模态函数f
作为优选,所述步骤(6)中,形状误差
本发明具有的有益效果:
(1)本发明基于自适应尺度空间表示技术和Riesz变换,扩展了原始的二维经验小波变换,建立了每个提取的固有模态函数与其物理尺寸之间的关系,弥补了经验小波变换无法表面成分表征的不足,实现工程表面多尺度表征和滤波,从而指示制造过程和零件功能的不规则性。
(2)本发明提出了一种基于扩展二维经验小波变换的工程表面多尺度滤波方法,克服了传统滤波方法中拟合误差、末端效应和模态混叠的缺点,实现工程表面各尺度成分的准确分离,为后续建立表面成分和加工工艺系统、零件性能的映射关系等工作的开展提供了基础。
附图说明
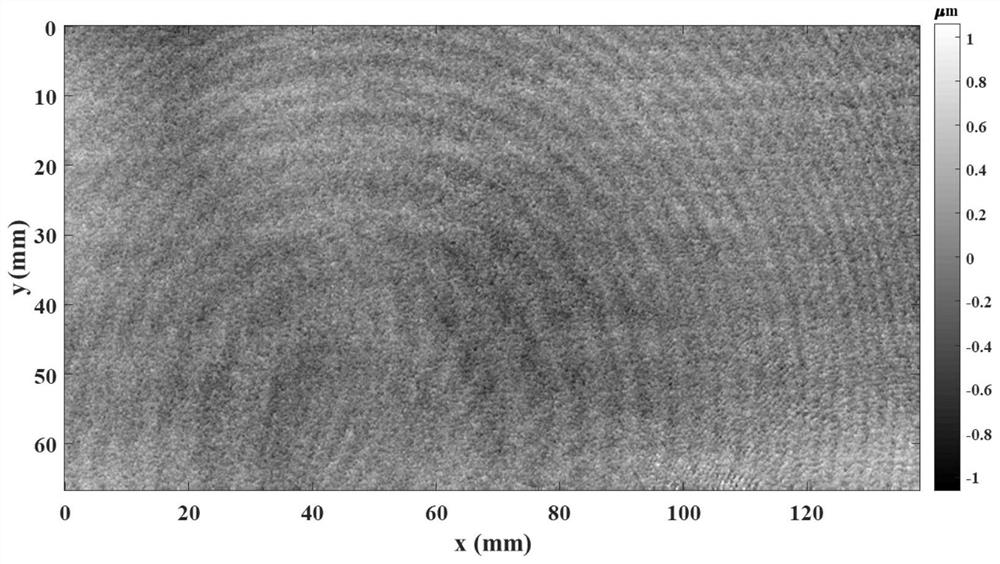
图1是实施例1原始工程表面灰度图像。
图2是实施例1频谱分割图。
图3是实施例1经验模态函数的表面灰度图像(a代表的是经验模态函数f
图4是实施例1采样的原始工程表面与各尺度表面成分图(a代表原始表面图像,b代表形状误差,c代表波纹度,d代表粗糙度)。
图5是实施例2原始工程表面灰度图像。
图6是实施例2频谱分割图。
图7是实施例2经验模态函数经验模态函数的表面灰度图像(a代表的是经验模态函数f
图8是实施例2采样的原始工程表面与各尺度表面成分图(a代表原始表面图像,b代表形状误差,c代表波纹度,d代表粗糙度)。
具体实施方式
下面结合具体实施方式对本发明做进一步的描述。
总实施例
一种基于扩展二维经验小波变换的工程表面多尺度滤波方法,所述方法包括下述步骤:
(1)生成灰度图像:通过将三维高密度点云数据中反映零件表面形貌的高度值映射为像素的灰度值,把高清晰测量点云数据转化为能够反映表面形貌高度值的灰度图像。
(2)获得去全局趋势的频谱:通过伪极快速傅里叶变换,计算工程表面灰度图像的均值频谱F
(3)自适应频谱分割:所述自适应频谱分割的具体过程为:通过尺度空间表示技术,生成频谱GF
(4)二维经验小波分解:二维经验小波分解的具体过程为:根据频谱边界集合Ω={ω
(5)经验模态函数合并:经验模态函数合并的过程为:通过Riesz变换,构建每个经验模态函数的单演信号f
(6)表面成分重构:利用二维经验小波的逆变换,将合并后的经验模态函数分别进行重构,从而将工程表面分离为形状误差
实施例1
一种基于扩展二维经验小波变换的工程表面多尺度滤波方法,所述方法包括下述步骤
(1)生成灰度图像:通过采用三维高分辨率表面形貌测量技术对某陶瓷量块表面进行测量,得到三维高密度点云数据,X、Y方向采样分辨率均为0.1mm,Z方向测量精度为1μm,测量表面大小138.2mm×66.6mm,测点总数可达92万点,采用将三维点云数据中反映零件表面形貌的高度值映射为像素灰度值的方法,生成量块表面的灰度图像,如图1所示。
(2)获得去全局趋势的频谱:计算生成灰度图像的均值频谱F
(3)自适应频谱分割:生成频谱GF
(4)二维经验小波分解:根据频谱边界集合和分割数,建立二维小波滤波器组 B
(5)经验模态函数合并:对每个经验模态函数进行Riesz变换,构建经验模态函数的单演信号集合{f
(6)表面成分重构:利用二维经验小波的逆变换,重构形状误差
实施例2
一种基于扩展二维经验小波变换的工程表面多尺度滤波方法,所述方法包括下述步骤
(1)生成灰度图像:通过采用三维高分辨率表面形貌测量技术对某刹车转子顶面进行测量,得到三维高密度点云数据,X、Y方向采样分辨率均为0.1mm,Z方向测量精度为1μm,测量表面大小275.4mm×268.3mm,测点总数可达700万点,采用将三维点云数据中反映零件表面形貌的高度值映射为像素灰度值的方法,生成缸体顶面加工过程的灰度图像。结合计算经济性,选取30mm×30mm大小的部分区域作为示例进行分析,如图5所示。
(2)获得去全局趋势的频谱:计算生成灰度图像的均值频谱F
(3)自适应频谱分割:生成频谱GF
(4)二维经验小波分解:根据频谱边界集合和分割数,建立二维小波滤波器组 B
(5)经验模态函数合并:对每个经验模态函数进行Riesz变换,构建经验模态函数的单演信号集合{f
(6)表面成分重构:利用二维经验小波的逆变换,重构形状误差
结论:通过上述实施例1-2可以看出本发明的多尺度滤波方法,克服了传统滤波方法中拟合误差、末端效应和模态混叠的缺点,实现了工程表面各尺度成分的准确分离,为建立表面成分和加工工艺系统、零件性能的映射关系等工作的开展提供了基础。
以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效变换,均仍属于本发明技术方案的保护范围。
- 一种基于扩展二维经验小波变换的工程表面多尺度滤波方法
- 一种基于多尺度时频分析的快速非局部均值InSAR相位滤波方法