一种混凝土泵车臂架结构的拓扑优化设计方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及一种混凝土泵车臂架结构的拓扑优化设计方法,特别涉及一种结构拓扑优化技术。
背景技术
随着高速铁路、高速公路、桥梁、机场、港口等基础设施的建设,工程机械在建设过程中发挥着主力军的作用,泵车作为其中的一员,在基础建设中扮演着重要角色。随着浇筑作业现场多样化的地形对泵车的需求,长臂架成为泵车产品发展的趋势。由于臂架加长势必造成其质量的提升,不仅增加倾覆风险,而且增加能耗,对臂架结构开展轻量化设计对提升泵车产品竞争力非常重要。
对泵车臂架进行轻量化设计的方法由两种,即采用结构优化设计和轻质材料。目前高强钢、碳纤维等轻质新型材料在工程机械产品中的应用为结构轻量化提供了多种选择,但新材料的应用也带来了与之相关新型材料的设计、模具、生产、试验等成本的大幅提高。从目前情况来看,采用结构优化设计技术实现泵车臂架轻量化是一个较好的选择。
传统的泵车臂架结构以箱体结构为主,也有部分桁架结构,箱体结构臂架的质量较大,桁架结构臂架的稳定性较差。因此,如何实现臂架的优化设计,使其刚度、强度和稳定性均符合安全的情况下,尽量降低自身的质量,满足使用要求,同时实现节能减排,这成为泵车臂架结构设计的一个难题。
发明内容
本发明的目的在于提供一种混凝土泵车臂架结构的拓扑优化设计方法。根据臂架结构的受力特点,选择具有矩形截面的箱型结构为初始结构,确定合理的设计区域;基于参数化驱动程序,实现臂架不同工况下的工作姿态,并采用子结构法确定单节臂架的载荷边界条件;以结构多姿态工况的加权应变能最小为优化目标,以体积分数为约束,基于变密度法,对臂架结构进行拓扑优化,根据优化结果的拓扑形态,考虑制造的可行性,得到轻量化的臂架结构。
本发明采用的技术方案是:
一种混凝土泵车臂架结构的拓扑优化设计方法,其特征在于:包括以下步骤:
步骤1:由于臂架在工作中主要承受竖直面的弯矩作用,为了保证臂架的刚度和强度要求,选择具有矩形截面的箱型结构为臂架的初始结构,其上下盖板材料均匀分布,设定为非设计区域;两侧腹板设定为优化的设计区域;
步骤2:泵车的臂架系统由若干节臂架组成,每节臂架之间通过销轴连接,单节臂架的边界载荷就是销轴所受反力,该反力随着臂架姿态及外部载荷的变化而改变;
2.1 建立整个臂架结构的有限元模型;
2.2 使用Python语言编写全参数化驱动程序,基于连杆位置驱动臂架结构实现多姿态;
2.3 根据泵车的实际情况加载,并采用子结构方法确定单节臂架在多姿态工况下的载荷边界条件;
步骤3:以单节臂架为对象,施加步骤2得到的臂架多姿态载荷边界条件,基于变密度法,以多姿态工况下结构加权应变能最小为优化目标,以体积分数为约束,对臂架进行拓扑优化设计;数学模型为:
其中,
步骤4:基于步骤3得到的结构材料密度分布图的设计结果,考虑制造工艺,得到优化后的臂架结构为:矩形截面的箱型结构,其中上下盖板为材料均匀分布的连续体,左右腹板互为对称,形成V型镂空结构。
本发明的优点:保证臂架在多姿态工况下的力学性能,并实现臂架结构的轻量化。
附图说明
下面结合附图和具体实施方式对本发明作进一步详细叙述。
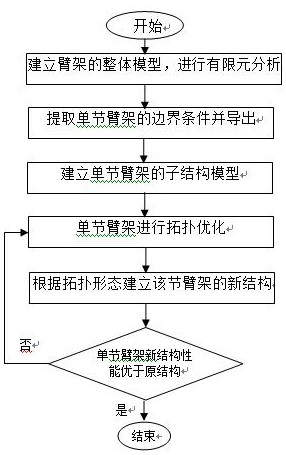
图1为本发明实施例中的设计流程图;
图2为本发明实施例中的臂架有限元模型图;
图3为本发明实施例中的某节臂架模型图;
图4为本发明实施例中的某节臂架拓扑优化设计结果图;
图5为本发明实施例中的某节臂架新结构图。
具体实施方式
如图1-5所示,一种混凝土泵车臂架结构的拓扑优化设计方法,其特征在于:包括以下步骤:
步骤1:由于臂架在工作中主要承受竖直面的弯矩作用,为了保证臂架的刚度和强度要求,选择具有矩形截面的箱型结构为臂架的初始结构,其上下盖板材料均匀分布,设定为非设计区域;两侧腹板设定为优化的设计区域;
步骤2:泵车的臂架系统由若干节臂架组成,每节臂架之间通过销轴连接,单节臂架的边界载荷就是销轴所受反力,该反力随着臂架姿态及外部载荷的变化而改变;
2.1 建立整个臂架结构的有限元模型;
2.2 使用Python语言编写全参数化驱动程序,基于连杆位置驱动臂架结构实现多姿态;
2.3 根据泵车的实际情况加载,并采用子结构方法确定单节臂架在多姿态工况下的载荷边界条件;
步骤3:以单节臂架为对象,施加步骤2得到的臂架多姿态载荷边界条件,基于变密度法,以多姿态工况下结构加权应变能最小为优化目标,以体积分数为约束,对臂架进行拓扑优化设计;数学模型为:
其中,
步骤4:基于步骤3得到的结构材料密度分布图的设计结果,考虑制造工艺,得到优化后的臂架结构为:矩形截面的箱型结构,其中上下盖板为材料均匀分布的连续体,左右腹板互为对称,形成V型镂空结构。
本发明保证臂架在多姿态工况下的力学性能,并实现臂架结构的轻量化。
为了使本发明实现的技术手段与功效易于明白了解,以某混凝土泵车臂架为例对本发明作具体阐述:
实施例:图1为设计流程图
首先建立泵车臂架的整体有限元模型,对其进行有限元分析。运用Python语言对有限元软件进行二次开发,基于连杆位置参数的变化,实现臂架结构有限元模型的参数化驱动,自动实现臂架不同工况下的各种姿态。在有限元模型中施加泵车工作时的实际载荷,采用子结构法,确定单节臂架的边界条件,从而建立单节臂架的子结构模型。确定子结构单节臂架结构中的设计区域与非设计区域。为了便于臂架的连接与装配,保证优化后该节臂架可装配到整体臂架中,臂架的连接位置作为非设计域;同时为了保证臂架结构的力学性能,根据臂架的受力特点,臂架的上下盖板作为非设计域,左右腹板作为优化的设计区;设计区域的密度为参数变量
经过上述设计步骤,即可得到臂架结构的拓扑优化设计结果。
建立泵车臂架有限元模型:建立泵车臂架有限元模型如图2所示,臂架的仿真分析模型主要有梁单元(beam section)、壳单元(shell section)和刚性单元(rigid body)组合而成。臂架每节之间的连接方式主要是螺栓和液压缸连接,单节臂架的连接方式主要为焊接。用梁单元表示螺栓连接,在梁单元与周边螺栓孔的连接采用刚性单元,液压缸的连接用梁单元连接表示。
该泵车模型某一节臂架结构如图3所示,依次对该节臂架的销轴进行编号,采用子结构方法对这5个销轴的载荷分别进行提取,并对提取的载荷进行验证分析,得到5个销轴处载荷。
臂架优化过程:
设定优化的区域为左右两块腹板(去除铰点垫圈),以结构多姿态工况下的加权应变能最小为优化目标,以体积分数为约束,拓扑优化数学模型如下:
约束:1号销轴孔全约束。
载荷:2-5号铰点提取的载荷施加在相应的销轴内圈。
以该节臂架的左右腹板为设计区域,采用最小尺寸约束,以该节臂架应变能最小作为优化目标,采用变密度法进行优化,优化结束后对左右腹板的设计区域重新设计结构。
图4为该节臂架拓扑优化的结果,上下盖板为连续体,左右腹板互为对称,腹板结构形成V型镂空结构,末端加强,根据实际制造工艺局部略有变动。
根据图4该节臂架拓扑优化的结构形态,建立该节臂架的新结构,如图5所示。
新结构中单节臂架最大应力从原结构的643.6MPa降低至630.6MPa,降低了2.02%,同时质量也从原来的453Kg减少至407.6Kg,减重了10.02%。
通过以上算例说明了本发明提出的优化设计方法的有效性与可行性。
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域技术人员对本发明的技术方案做出的各种变形和改进,均应纳入本发明权利要求书确定的保护范围内。
- 一种混凝土泵车臂架结构的拓扑优化设计方法
- 一种臂架结构、臂架装置及混凝土泵车