一种适用于异形顶管机的盲区开挖装置
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及非开挖工程设备及方法技术领域,具体涉及一种适用于异形顶管机的盲区开挖装置。
背景技术
目前,绝大多数矩形顶管施工采用矩形顶管机,此类型的顶管机采用多刀盘结构旋转开挖,刀盘的圆形结构决定了它无法覆盖矩形存在的所有区域,如图1阴影部分所示,即存在较大的开挖盲区,盲区面积大,且分布较多,出土的效率过低直接导致顶进的阻力加大,不但增加了掘进推进的难度,而且大大增加了壳体胸板承受的压力,极大地影响了整机的安全性和可靠性。
为此,业界揭示了一种顶管机,参看CN202926334U专利文献,如图2所示,该顶管机包括盾体1’、推进盾体的驱动系统、设置于盾体1’上的多刀盘组合式切削系统2’以及设置在盾体1’上的多个截割系统的盲区切削系统3’,通过截割系统的盲区切削系统3’来开挖盲区,但存在切削不充分,即还是存在较大面积的开挖盲区。
有鉴于此,本发明人针对现有技术中的上述缺陷深入研究,遂有本案产生。
发明内容
本发明目的在于一种适用于矩形顶管机的盲区开挖装置,其具有较高的精确性、稳定性和灵活性。
为实现上述目的,一种适用于矩形顶管机的盲区开挖装置,它包括盲区开挖破碎装置、驱动装置和铰接支撑装置,所述盲区开挖破碎装置为一直杆构件,其一端为工作端,另一端为控制端,以及在所述工作端和控制端之间设有球铰接部;所述铰接支撑装置设置在盾体土仓后部的前盾承压隔板的预设位置;所述盲区开挖破碎装置通过球铰接部内嵌至铰接支撑装置内使之成为球铰接运动副A,同时所述驱动装置与盲区破碎装置的控制端万向连接,用以实现盲区开挖破碎装置以球铰接运动副A为转动支点、球铰接运动副A至盲区开挖破碎装置的控制端的距离R1为半径转动,实现对盲区开挖破碎装置的控制端的周向转动的位置的控制,继而实现对盲区开挖破碎装置的工作端的位置定位。
采用上述设计,通过驱动装置控制盲区破碎装置控制端以球铰接运动副A为转动支点、球铰接运动副A至盲区开挖破碎装置的控制端的距离R1为半径的周向转动的位置,继而实现盲区开挖破碎装置的工作端的位置定位。因此,只需确定控制端的运动轨迹,即可以确定工作端的开挖切削轨迹。该开挖装置准确性高,能够更充分地对盲区进行开挖,从而提高盲区的开挖效率;同时,该驱动装置与盲区开挖破碎装置的控制端万向连接,使盲区开挖破碎装置的控制端可360°旋转,避免整个装置在工作过程中别死,提高了灵活性。
针对驱动装置的其中一个实施例为:所述驱动装置包括第一移动座、第二移动座、第三移动座、驱动座、第一驱动机构以及第二驱动机构;所述第一移动座固接于盾体内,所述第二移动座与第一移动座沿x轴方向及z轴方向相互限位,藉由第一驱动机构实现第二移动座相对于第一移动座沿y轴方向的位移;所述的第三移动座设置在第二移动座内,其与第二移动座沿x轴方向及y轴方向相互限位,并与第二移动座沿z轴方向存在位移空间,且所述第三移动座设有一弧形控制面,所述弧形控制面设有一沿x轴方向的第一限位通槽;所述驱动座设置在第三移动座内,且所述驱动座的一端插置于第一限位通槽内,另一端与所述盲区开挖破碎装置的控制端万向连接,所述驱动座与第三移动座沿y轴方向及z轴方向相互限位,藉由第二驱动机构,实现驱动座相对于第三移动座在第一限位通槽内沿x轴方向左右摆动。
采用上述设计,藉由第一驱动机构实现第二移动座相对于第一移动座沿y轴方向的位移,进而带动盲区开挖破碎装置的控制端沿y轴方向上下运动,藉由第二驱动机构实现驱动座相对于第三移动座在第一限位通槽内左右摆动,进而带动盲区开挖破碎装置的控制端沿x轴方向左右摆动。同时,第二移动座相对于第一移动座沿y轴方向位移及驱动座相对于第三移动座在第一限位通槽内沿x轴方向左右摆动时,盲区开挖破碎装置会在z轴方向上前后小范围地移动,为此,第三移动座与第二移动座沿z轴方向需要存在位移让位空间。
进一步,所述驱动座包含一连接块,所述连接块朝向控制端的一端为球铰接头,所述驱动座通过球铰接头内嵌至盲区开挖破碎装置的控制端内使之成为球铰接运动副B,使得盲区开挖破碎装置的控制端可360°旋转,提高了灵活性;同时,所述连接块另一端伸出第三移动座的第一限位通槽并固接限位块,所述限位块的内端面与第三移动座的弧形控制面的外侧端面相切,如此设置,实现驱动座与第三移动座沿y轴方向及z轴方向相互限位,藉由第二驱动机构实现驱动座相对于第三移动座在第一限位通槽内沿x轴方向左右摆动。
更进一步,所述第三移动座内在驱动座连接块的位置处设有一支撑平台,所述支撑平台用于给连接块提供有效支撑。所述连接块抵靠于支撑平台上,使驱动座相对于第三移动座能够稳固地在第一限位通槽内沿x轴方向左右摆动;同时,支撑平台的设置,避免盲区破碎装置在工作过程中与第三移动座的底面产生干涉。
针对第一移动座、第二移动座以及第三移动座的其中一个实施例为:所述第一移动座至少由一底板和两侧板组成,两所述侧板相平行设置并与底板垂直,各个所述侧板设有沿y轴方向的第二限位通槽;
所述第二移动座为至少由两侧壁和底壁合围而成的U型槽构件,每所述侧壁的沿宽度方向的两外侧边缘沿x轴方向向外延伸形成第一凸台,且侧壁顶部的内侧边缘沿x轴方向向内延伸形成第二凸台;所述第二移动座设置在第一移动座内,所述第二移动座两侧壁的外侧各自抵靠于对应的第一移动座侧板的内侧,以及所述第一凸台将各个第一移动座侧板卡抱其中,从而使第一移动座和第二移动座沿x轴方向及z轴方向相互限位,藉由第一驱动机构实现第二移动座相对于第一移动座在第二限位通槽内位移;
所述第三移动座至少由两侧面、一底面和一弧形控制面合围而成,所述弧形控制面设置在第三移动座的后端;所述第三移动座设置在第二移动座内,所述第三移动座两侧面的外侧各自抵靠于对应的第二移动座侧壁的内侧,以及所述第三移动座沿y轴方向的两端分别抵靠于第二移动座底壁和第二凸台,从而使第三移动座与第二移动座沿x轴方向及y轴方向相互限位。
进一步,所述第三移动座底面的外表面沿z轴方向的两端分别向下凸设有第一挡沿和第二挡沿,第一挡沿与和第二挡沿z轴方向之间的间距L1>第二移动座底壁沿z轴方向的长度L2,藉由第一挡沿和第二挡沿之间的限位,实现所述第三移动座相对于第二移动座沿z轴方向前后小范围地移动。
进一步,所述第一移动座底板沿x轴方向的两端各固设有一第一固定座,所述第二移动座的两侧壁外侧各固设第一枢接座,所述第一枢接座穿置于第一移动座的第二限位通槽内并往外伸出;所述第一驱动机构为液压油缸,其设置为两个,每个所述第一驱动机构的伸缩端与相应的第一枢接座相连,另一端与相应的第一固定座相连。
进一步,所述第三移动座的其中一个侧面内侧固设有一第二固定座,所述驱动座上固设有一第二枢接座;所述第二驱动机构为液压油缸,其伸缩端与第二枢接座相连,另一端与第二固定座相连。
进一步,所述第二移动座底壁的前端和第三移动座底面的前端各开设有一镂空部,所述镂空部提供让位空间便于盲区开挖破碎装置的控制端沿y轴方向上下摆动。
针对铰接支撑装置的其中一个实施例为:所述铰接支撑装置包括挡圈和法兰,所述挡圈通过法兰固定在盾体内,所述盲区开挖破碎装置通过球铰接部内嵌至挡圈和法兰内使之成为球铰接运动副A。
附图说明
作为非限制性例子给出的具体说明更好地解释本发明包括什么以及其可被实施,此外,该说明参考附图,在附图中:
图1为习用矩形顶管机产生的盲区的示意图;
图2为CN202926334U专利文献所揭示的矩形顶管机的结构图;
图3为本发明盲区开挖装置与刀盘的分布图;
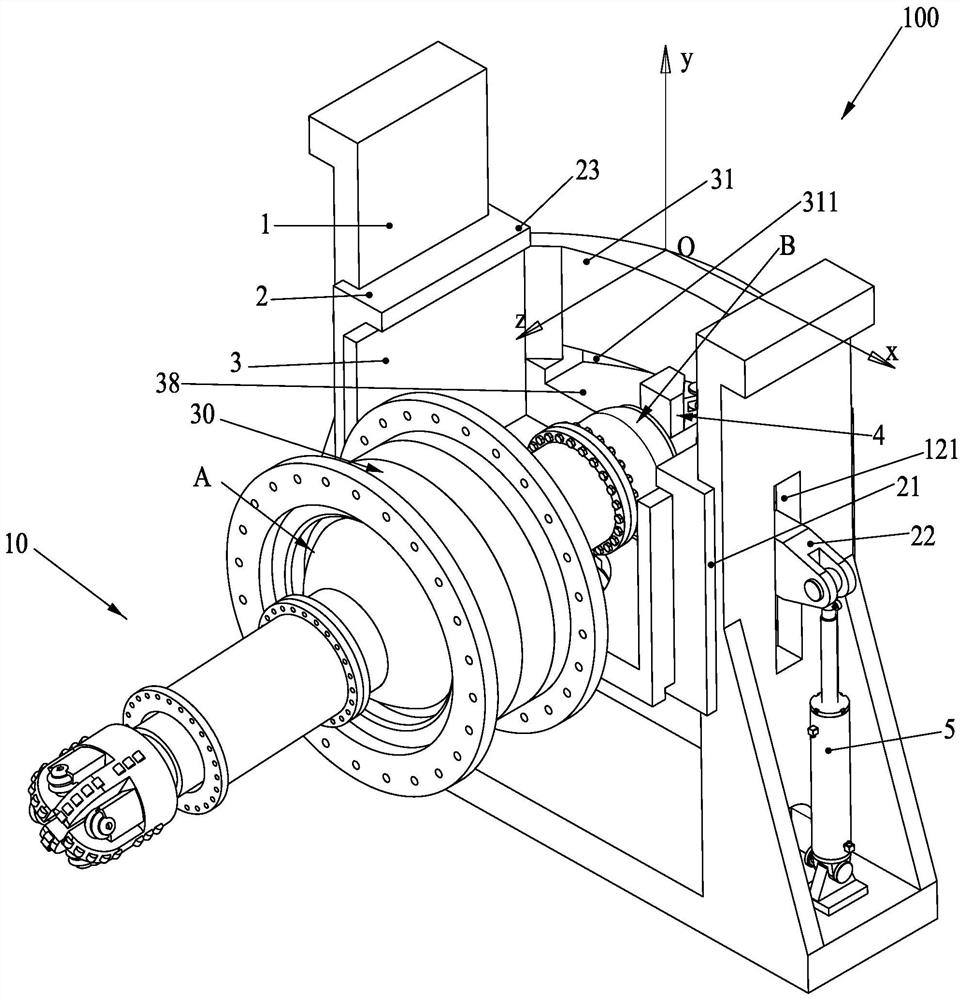
图4为本发明不包括盲区开挖破碎装置的一种适用于异形顶管机的盲区开挖装置的组合立体图;
图5为本发明不包括盲区开挖破碎装置的一种适用于异形顶管机的盲区开挖装置的正视图;
图6为本发明的一种适用于异形顶管机的盲区开挖装置的组合图;
图7为本发明的一种适用于异形顶管机的盲区开挖装置的分解图;
图8为本发明的盲区开挖破碎装置的控制端和工作端的运动轨迹的示意图。
图号说明盲区开挖装置100,盲区开挖破碎装置10,工作端101,控制端102,球铰接部103;驱动装置20,第一移动座1,底板11,侧板12,第二限位通槽121,第一固定座13;第二移动座2,第一凸台21,第一枢接座22,第二凸台23,侧壁25,底壁26;第三移动座3,弧形控制面31,第一限位通槽311,第一挡沿32,第二挡沿33,第二固定座34,镂空部24,35,侧面36,底面37,支撑平台38;驱动座4,第二枢接座41,球铰接头42,限位块43,圆弧面431,连接块44;第一驱动机构5,第二驱动机构6,铰接支撑装置30,挡圈301,法兰302,刀盘200。
具体实施方式
以下结合附图及具体实施例对本发明做详细描述。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”是指如图5所示的盲区开挖装置在正交坐标系Oxyz中的取向。术语“上”、“下”、“顶”、“底”涉及沿Oy轴线的取向,术语“前”、“后”涉及沿Oz轴线的取向,术语“左”、“右”涉及Ox的取向。
此外,术语“第一”、“第二”都是为了区别不同的对象,而不是用于描述特定的顺序。
本发明揭示了一种适用于异形顶管机的盲区开挖装置100,异形顶管是指除圆形端面管材以外的顶管,最常见的有矩形、拱门形和马蹄形顶管。本实施例示出了一种矩形顶管机,但不限于此,图3示出了盲区开挖装置100与刀盘200的布置,图3中的重影部分表示的是矩形顶管机在工作过程中存在的盲区,本发明的盲区开挖装置100布置在盲区区域,且位于刀盘200的后端,图3中的阴影部分和重影部分表示的是该盲区开挖装置100的切削范围。
如图4至图7所示,该盲区开挖装置100包括盲区开挖破碎装置10、驱动装置20和铰接支撑装置30,所述盲区开挖破碎装置10为一直杆构件,其一端为工作端101,另一端为控制端102,以及在所述工作端101和控制端102之间设有球铰接部103。所述铰接支撑装置30设置在盾体土仓后部的前盾承压隔板的预设位置,所述盲区开挖破碎装置10通过球铰接部103内嵌至铰接支撑装置30内使之成为球铰接运动副A,同时所述驱动装置20与盲区破碎装置的控制端102万向连接,且所述驱动装置20控制盲区开挖破碎装置10的控制端102以球铰接运动副A为转动支点、球铰接运动副A至盲区开挖破碎装置10的控制端102的距离R1为半径周向转动,通过驱动装置20来控制盲区开挖破碎装置10的控制端102的运动轨迹,进而确定工作端101的开挖切削轨迹,如图8所示。
具体地,如图4至图7所示,所述驱动装置20包括第一移动座1、第二移动座2、第三移动座3、驱动座4、第一驱动机构5以及第二驱动机构6,在本实施例中,第一驱动机构5设置为两个,第一驱动机构5及第二驱动机构6均为液压油缸。
所述第一移动座1固接于盾体内,所述第一移动座1至少由一底板11和两侧板12组成,两侧板12相平行设置并与底板11垂直,各个所述侧板12设有沿y轴方向的第二限位通槽121,所述底板11沿x轴方向的两端各固设有一第一固定座13,所述第二移动座2的两侧壁25外侧各固设第一枢接座22,所述第一枢接座22穿置于第一移动座1的第二限位通槽121内并往外伸出。
所述第二移动座2为至少由两侧壁25和顶壁合围而成的U型槽构件,每个侧壁25沿宽度方向的两外侧边缘沿x轴方向向外延伸形成第一凸台21,且侧壁25顶部的内侧边缘沿x轴方向向内延伸形成第二凸台23;所述第二移动座2设置在第一移动座1内,所述第二移动座2两侧壁25的外侧各自抵靠于对应的第一移动座1侧板12的内侧,以及所述第一凸台21将各个第一移动座1侧板12卡抱其中,从而使第一移动座1和第二移动座2沿x轴方向及z轴方向相互限位。所述第一驱动机构5的伸缩端与第一枢接座22相连,另一端与第一固定座13相连,藉由第一驱动机构5实现第二移动座2相对于第一移动座1在第二限位通槽121内位移,继而带动盲区开挖破碎装置10的控制端102沿y轴方向上下运动。
所述第三移动座3至少由两侧面36、一底面37和一弧形控制面31合围而成,所述弧形控制面31设置在第三移动座3的后端,且所述弧形控制面31设有一沿x轴方向的第一限位通槽311。所述第三移动座3设置在第二移动座2内,所述第三移动座3两侧面36的外侧各自抵靠于对应的第二移动座2侧壁25的内侧,以及所述第三移动座3沿y轴方向的两端分别抵靠于第二移动座2底壁26和第二凸台23,从而使第三移动座3与第二移动座2沿x轴方向及y轴方向相互限位。
所述驱动座4包含一连接块44,所述连接块44朝向控制端102的一端为球铰接头42,所述驱动座4通过球铰接头42内嵌至盲区开挖破碎装置10的控制端102内使之成为球铰接运动副B,使盲区开挖破碎装置10的控制端102可360°旋转,避免整个装置在工作过程中别死,提高了灵活性。
该连接块44另一端伸出第三移动座3的第一限位通槽311内并固接限位块43,所述限位块43的内端面为与第三移动座3的弧形控制面31的外侧相切的圆弧面431。如此设置,实现驱动座4与第三移动座3沿y轴方向及z轴方向相互限位。所述第三移动座3内在驱动座4连接块44的位置处设有一支撑平台38,所述支撑平台38用于给连接块44提供支撑;该所述连接块44抵靠于支撑平台38上,使驱动座4相对于第三移动座3能够稳固地在第一限位通槽311内沿x轴方向左右摆动;同时,在本实施例中,该支撑平台38位于第三移动座3的后端,并与第三移动座3底面37的内端面之间具有一定高度,避免盲区破碎装置10在工作过程中与第三移动座3的底面37产生干涉。
所述第三移动座3的其中一个侧面36内侧固设有一第二固定座34,所述驱动座4上固设有一第二枢接座41;所述第二驱动机构6的伸缩端与第二枢接座41相连,另一端与第二固定座34相连,藉由第二驱动机构6实现驱动座4相对于第三移动座3在第一限位通槽311内沿x轴方向左右摆动,继而带动盲区开挖破碎装置10的控制端102在第一限位通槽311内沿x轴方向左右摆动。
由于第二移动座2相对于第一移动座1沿y轴方向位移及驱动座4相对于第三移动座3在第一限位通槽311内沿x轴方向左右摆动时,盲区开挖破碎装置10的控制端102实际上还会在z方向上小范围移动,为此,所述第三移动座3与第二移动座2沿z轴方向存在位移空间,具体地,如图7所示,在本实施例中,所述第三移动座3底面37的外表面沿z轴方向的两端分别向下凸设有第一挡沿32和第二挡沿33,第一挡沿32与第二挡沿33之间的间距L1>第二移动座2底壁沿z轴方向的长度L2,藉由第一挡沿32和第二挡沿33之间的的限位,以实现所述第三移动座3相对于第二移动座2沿z轴方向前后小范围地移动,以确保盲区开挖装置100在工作过程中不会别死。
优选地,所述第二移动座2底壁26的前端和第三移动座3底面37的前端各开设有一镂空部24,35,所述镂空部24,35提供让位空间便于盲区开挖破碎装置10的控制端102沿y轴方向上下摆动。
具体地,如图6所示,所述铰接支撑装置30包括挡圈301和法兰302,所述挡圈301通过法兰302固定在盾体内,所述盲区开挖破碎装置10通过球铰接部103内嵌至挡圈301和法兰302内使之成为球铰接运动副A。
本发明的重点在于:该开挖破碎装置的控制端102在Oxy平面内以球铰接副A为圆心、球铰接副A至控制端102之间的距离R1为半径360°转动所构成的圆C,如图8中的阴影部分,而驱动装置20的运动轨迹由沿x轴方向的第一限位通槽的位移距离与沿y轴方向的第二限位通槽的位移距离所构成的矩形,因此,在驱动装置20的控制下,该开挖破碎装置的控制端102的运动轨迹为圆C和矩形之间的重叠部分,如图8所示的重影部分,继而实现对盲区开挖破碎装置10工作端101的位置定位。
上述实施例和图示并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化和修饰,皆应视为不脱离本发明的专利范畴。
- 一种适用于异形顶管机的盲区开挖装置
- 一种矩形顶管机盲区开挖破碎装置