致动器及包含致动器的芯片
文献发布时间:2023-06-19 10:57:17
【相关申请案的交叉引用】
本申请案主张2019年11月7日申请的美国临时专利申请案第62/931,926号的优先权,其整体经由引用被并入本文。
【技术领域】
本发明关于一种直线致动器,特别关于一种微机电系统(Microelectromechanical System,MEMS)直线致动器。
【背景技术】
MEMS致动器具有许多优点,例如小尺寸、低成本、精确的运动控制及低功耗,这使MEMS致动器适用于紧密型电子装置或系统的应用中。为了提高MEMS致动器的机械能量转换效率,通常会使用非常窄的结构间距。使用非常窄的结构间距会导致制程残留物难以去除。当承载物的重心未对准致动器的重心时,承载物会倾斜。承载物的倾斜引起承载物与致动器之间的接触点处的应力集中的问题,这又将容易引起承载物从致动器脱离。由于来自承载物的作用力方向与梳状结构的预定方向不能很好地对准,这将导致梳状结构倾斜并发生离轴运动。这种离轴运动会降低梳状结构的运动效率,甚至导致移动的梳状结构卡在固定的梳状结构上。
【发明内容】
本发明的单轴线性致动器克服了现有技术中的许多缺点,其可独立地运作或作为组件中的组件运作。
因此,本发明提供一种直线致动器。直线致动器包括:一基板,具有一空腔;一第一固定电极结构,形成于该基板上;以及一可动电极结构,通过一弹性组件连接到该基板,其中:该第一固定电极结构具有一第一多个梳指;以及该可动电极结构具有一第二多个梳指,通过该第一多个梳指与该第二多个梳指,该第一固定电极结构与该可动电极结构形成一电容器,且该第一多个梳指与该第二多个梳指设置在该空腔的上方。
本发明另提出一种致动器。致动器包括:一基板,具有一空腔;一第一固定电极结构,固定在该基板上;一弹性悬挂装置;以及一可动电极结构,通过该弹性悬挂装置连接到该基板,其中:该空腔具有一第一面积;该第一固定电极结构与该可动电极结构的至少其中之一在该基板上具有一第二投影面积;以及该第一面积与该第二投影面积互相重叠。
本发明另提出一种具有致动器的芯片。
【附图说明】
本发明的上述目的及优点在参阅以下详细说明及附随图式之后对那些所属技术领域中具有通常知识者将变得更立即地显而易见。
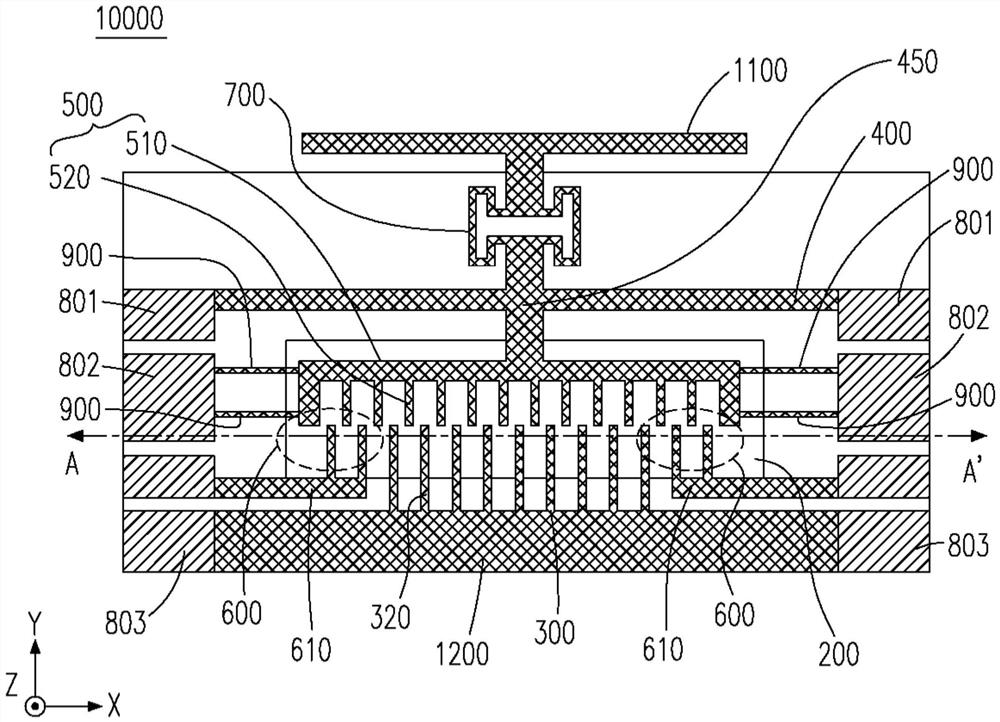
[图1]为本发明的直线致动器的实施例的俯视示意图。
[图2]为图1的直线致动器中沿A-A’方向的剖面示意图。
[图3(A)]为第一面积与第二投影面积的关系范例。
[图3(B)]为第一面积与第二投影面积的另一关系范例。
[图3(C)]为第二空腔的位置范例。
[图4(A)]为承载物的重心在没有T柱及支点弹簧下对准直线致动器的重心的范例。
[图4(B)]为承载物的重心在没有T柱及支点弹簧下未对准直线致动器的重心的范例。
[图4(C)]为本发明含有T柱及支点弹簧的实施例。
[图5(A)及5(B)]为支点弹簧的另外两个实施例的俯视示意图。
[图6(A)]为排列在致动器晶圆上的芯片的示意图。
[图6(B)]为图6(A)中沿B-B’方向的剖面示意图。
[图6(C)]为覆盖在致动器晶圆上以在切割晶圆时固定可动结构的保护材料的示意图。
【具体实施方式】
以下在实施方式中详细叙述本发明的详细特征以及优点,其内容足以使任何本领域技术人员了解本发明的技术内容并据以实施,且根据本说明书所揭露的内容、申请专利范围及图式,任何本领域技术人员可轻易地理解本发明相关的目的及优点。以下的实施例为进一步详细说明本发明的观点,但非以任何观点限制本发明的范围。
请参阅图1-2,其中图1为本发明的致动器的实施例的俯视示意图,也就是直线致动器10000,且直线致动器10000为一种单轴直线运动致动器。图2为图1的直线致动器中沿A-A’方向的剖面示意图。直线致动器10000包括具有空腔200及电子组件110的基板100。基板100具有前表面120及后表面130,且空腔200通过前表面120及后表面130以z-方向延伸,如图1所示。直线致动器10000还包括形成于基板100上的第一固定电极结构300,使第一固定电极结构300固定在基板100上。直线致动器10000还包括通过弹性组件400连接到该基板100的可动电极结构500,其可以是弹性悬挂装置。第一固定电极结构300与可动电极结构500形成电容器。在图1的实施例中,第一固定电极结构300与可动电极结构500皆是梳子结构。因此,第一固定电极结构300具有第一多个梳指320,且可动电极结构500具有第二多个梳指520。第一多个梳指320及第二多个梳指520中的每个梳指彼此平行。当没有电压施加在第一固定电极结构300与可动电极结构500之间,第一固定电极结构300的第一多个梳指320与可动电极结构500的第二多个梳指520不会交叉。电容器是通过第一多个梳指320与第二多个梳指520而形成。第一多个梳指320与第二多个梳指520设置在空腔200上方,以确保制程时的残留物会通过空腔200而完全移除。因此,空腔200的大小必须够大以完全移除残留物,侧边微大于10微米的方形是够大的。从另一方面来看,如果从空腔200的后表面130向上看并可看到任何梳指,则空腔200够大。在本发明中,空腔200的水平投影面积定义为第一面积210,而第一固定电极结构300与可动电极结构500至少其中之一在基板100上的水平投影面积定义为第二投影面积350。图3A显示第二投影面积350在基板上的范例,其中第二投影面积350是第一固定电极结构300与可动电极结构500的投影面积。第二投影面积可以是只有第一固定电极结构300或可动电极结构500的投影面积。第一面积210与第二投影面积350部分重叠。“部分重叠”指的是第一面积210与第二投影面积350以一定的百分比重叠,可以是第二投影面积350的至少1%,使空腔200有足够的大小以完全移除残留物,如图3B所示,其中第二投影面积350是可动电极结构500的投影面积。在没有空腔200的情况下,第一多个梳指320与第二多个梳指520必须稀疏地排列以移除残留物。但是当第一多个梳指320与第二多个梳指520排列稀疏,机械能量转换效率是低的。换句话说,施加在第一固定电极结构300与可动电极结构500之间的电压必须是高的。因此,空腔200可移除残留的制程污染物,并提高机械能量转换的效率。
设置于基板100上的电子组件110指的是基板100上的所有运动控制电子组件及电路的总称。直线致动器10000还包括由可动电极结构500与第二固定电极结构610在基板100上形成的至少一位置感测电容器600。至少一位置感测电容器600不是设置在基板100的空腔200上方,就是设置在基板100的第二空腔上方。若空腔200也可移除至少一位置感测电容器600的残留的制程污染物,则不需要第二空腔。举例来说,图1所示的实施例中,空腔200是够大来移除两个位置感测电容器600的残留的制程污染物,且没有第二空腔。当需要时,第二空腔会设置在基板100中以特定地移除至少一位置感测电容器600的残留的制程污染物。例如,图3C所示的实施例中,位置感测电容器600的第二固定电极结构610具有水平投影面积650,第二空腔具有水平投影面积260,且位置感测电容器600设置于基板的第二空腔的上方。至少一位置感测电容器600用于侦测可动电极结构500的位移。
图1所示的实施例中,弹性组件400(或弹性悬挂装置)称为主弹簧。主弹簧具有第一端、第一中心点450与一第二端,且第一端与第二端固定在基板100上。第一端与第二端皆通过第一锚801固定在基板100上。可动电极结构500具有与第一中心点450连接的龙骨510。直线致动器10000还包括与第一中心点450连接的支点弹簧700,且T柱1100与支点弹簧700连接。采用T柱1100是为了容易地将所支承的承载物保持在其上。在其他应用中,此单轴直线运动致动器是被设计为翻转90度以驱动乘载物沿出平面方向运动。支点弹簧700的目的是解决当剪切力被施加在支点弹簧700与T柱1100之间的连接点时,承载物从T柱1100上脱离的问题。请见图4A-4C,图4A为承载物5000的重心在没有T柱及支点弹簧下对准直线致动器的重心的范例,相比之下,图4B为承载物5000的重心在没有T柱及支点弹簧下未对准直线致动器的重心的范例。在图4B中,应力会集中在圆圈区,也因此会产生扭力。图4B为本发明含有支点弹簧700及T柱1100的实施例,可避免图4B中引起的问题。支点弹簧700在x方向上具有低刚度,但在y方向及z方向上具有高刚度。也就是说,y方向的刚度k
直线致动器10000还包括至少一对限制弹簧900,其中至少一对限制弹簧900中的每一限制弹簧具有第三端及第四端,第三端连接至龙骨510或第二多个梳指520的最外侧梳指,且第四端经由第二锚802固定在基板100上。在图1所示的实施例中,有两对限制弹簧900。通过模拟可以看出,当向T柱1100施加0.05N的y方向的力时,y方向的运动达到500微米,且主弹簧的变形仍未达到断裂强度。换句话说,本发明可用于在出平面方向上提供大于500微米的大运动行程。当y方向与x方向的力皆为0.5N时,限制弹簧900有效的限制可动电极结构500的离轴运动。同时,支点弹簧700可有效的变形以防止承载物从T柱1100的表面上脱离。当承载物的质量为5毫克时,0.5N的力等于1,020g(g表示一个重力)。因此,本发明的直线致动器可以克服冲击的稳定性问题。
直线致动器10000还包括支撑臂1200,第一固定电极结构300从支撑臂1200延伸出,其中支撑臂1200具有第五端及第六端,且第五端及第六端皆经由第三锚803固定在基板100上。
致动器晶圆在此阶段具有带有可动结构的多个芯片。如何保护这些在芯片中的可动结构直到芯片因致动器晶圆被切割而分离是一个非常重要的问题。图6A-6C显示如何在切割晶圆时保护直线致动器10000的可动结构的保护材料的示意图。如图6A所示,在晶圆切割程序前,基板中在T柱1100的位置有第三空腔20500。第三空腔20500会为T柱1100的运动行程而保留。如图6B所示,致动器晶圆20000附着在载体晶圆30000上。如图6C所示,如光阻剂或蜡的保护材料20100会涂覆在致动器晶圆20000上,以在切割晶圆时固定可动结构。在晶圆切割后,载体晶圆30000会从致动器晶圆20000上分离,且会移除保护材料20100以得到芯片,每一个芯片皆包括一个直线致动器10000。晶圆的分离及保护材料20100的移除皆可经由施加化学试剂而轻易实现。
实施例
1.一种直线致动器,包括:一基板,具有一空腔;一第一固定电极结构,形成于该基板上;以及一可动电极结构,通过一弹性组件连接到该基板,其中:该第一固定电极结构具有一第一多个梳指;以及该可动电极结构具有一第二多个梳指,通过该第一多个梳指与该第二多个梳指,该第一固定电极结构与该可动电极结构形成一电容器,且该第一多个梳指与该第二多个梳指设置在该空腔的上方。
2.如实施例1所述的直线致动器,其中该基板具有一电子组件。
3.如实施例1或2所述的直线致动器,其中该基板具有一前表面与一后表面,且该空腔从该前表面延伸到该后表面。
4.如实施例1-3中任一实施例所述的直线致动器,还包括一第二固定电极结构,形成于该基板上,其中至少一位置感测电容器由该可动电极结构与该第二固定电极结构形成,且该至少一位置感测电容器设置在该空腔与该基板的一第二空腔其中之一的上方。
5.如实施例1-4中任一实施例所述的直线致动器,其中该弹性组件是主弹簧。
6.如实施例1-5中任一实施例所述的直线致动器,其中该主弹簧具有一第一端、一第一中心点与一第二端,且该第一端与该第二端固定在该基板上。
7.如实施例1-6中任一实施例所述的直线致动器,其中该可动电极结构具有与该第一中心点连接的一龙骨。
8.如实施例1-7中任一实施例所述的直线致动器,还包括与该第一中心点连接的一支点弹簧。
9.如实施例1-8中任一实施例所述的直线致动器,其中该第一端与该第二端皆由一第一锚固定在该基板上。
10.如实施例1-9中任一实施例所述的直线致动器,还包括至少一对限制弹簧,其中该至少一对限制弹簧中的每一限制弹簧具有一第三端及一第四端,该第三端连接至该龙骨及该第二多个梳指的一最外侧梳指其中之一,且该第四端经由一第二锚固定在该基板上。
11.如实施例1-10中任一实施例所述的直线致动器,还包括一T柱,连接至该支点弹簧。
12.如实施例1-11中任一实施例所述的直线致动器,还包括一支撑臂,连接至该第一固定电极结构,其中该支撑臂具有一第五端及一第六端,且该第五端及该第六端皆经由一第三锚固定在该基板上。
13.一种致动器,包括:一基板,具有一空腔;一第一固定电极结构,固定在该基板上;一弹性悬挂装置;以及一可动电极结构,通过该弹性悬挂装置连接到该基板,其中:该空腔具有一第一面积;该第一固定电极结构与该可动电极结构的至少其中之一在该基板上具有一第二投影面积;以及该第一面积与该第二投影面积互相重叠。
14.如实施例13所述的致动器,其中该第一固定电极结构与该可动电极结构形成一电容器。
15.如实施例13或14所述的致动器,其中该基板具有一电子组件。
16.如实施例13-15中任一实施例所述的致动器,其中该基板具有一前表面与一后表面,且该空腔从该前表面延伸到该后表面。
17.如实施例13-16中任一实施例所述的致动器,还包括一第二固定电极结构,形成于该基板上,其中每一个该至少一位置感测电容器由该可动电极结构与该第二固定电极结构形成于该基板上,且该至少一位置感测电容器设置在该空腔与该基板的一第二空腔其中之一的上方。
18.如实施例13-17中任一实施例所述的致动器,其中该弹性悬挂装置是一主弹簧,该主弹簧具有一第一端、一中心点与一第二端,且该第一端与该第二端固定在该基板上。
19.如实施例13-18中任一实施例所述的致动器,还包括一支撑臂,连接至该第一固定电极结构,其中该支撑臂具有一第五端及一第六端,且该第五端及该第六端经由一锚固定在基板上。
20.一种芯片,包括如实施例1-12任一实施例所述的直线致动器及如实施例13-19任一实施例所述的致动器。
本发明实属难能的创新发明,深具产业价值,援依法提出申请。此外,本发明可以由所属技术领域中具有通常知识者做任何修改,但不脱离如所附申请专利范围所要保护的范围。
【符号说明】
100:基板
110:电子组件
120:前表面
130:后表面
200:空腔
210:第一面积
260:水平投影面积
300:第一固定电极结构
320:第一多个梳指
350:第二投影面积
400:弹性组件
450:第一中心点
500:可动电极结构
510:龙骨
520:第二多个梳指
600:位置感测电容器
610:第二固定电极结构
650:水平投影面积
700:支点弹簧
801:第一锚
802:第二锚
803:第三锚
900:限制弹簧
1100:T柱
1200:支撑臂
5000:承载物
10000:直线致动器
20000:致动器晶圆
20100:保护材料
20500:第三空腔
30000:载体晶圆
- 致动器及包含致动器的芯片
- 用于飞行器的控制表面的致动器组件、包含该致动器组件的飞行器及使用它们的方法