一种多圈转角机械限位结构及自动绕线模块
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及日常生活用品领域,具体涉及一种应用于自动绕线模块的多圈转角机械限位结构以及包含该限位结构的自动绕线模块。
背景技术
随着人们生活水平的不断提高,具有自动绕线模块的生活用品非常广泛,如电动耳机收线器、电动收紧鞋带的鞋、电动收紧塑型文胸等。这类产品通常因便携需求需要自动绕线模块微小、轻便;自动绕线模块除了基本的收紧放松可微调功能外,通常还具有极限转角位置限位功能。有些高端产品还能够与手机交互,自适应收紧模式;另外由于主要应用于智能穿戴产品,产品的易耗性决定了产品对模块的成本非常敏感。这类产品往往需要辅助转角机械限位来帮助控制系统定义初始和极限转角位置。
申请号为US 9,861,165 B2的美国发明专利公开了一种自动鞋带收紧模块,该模块通过控制电机正反转通过一个方形金属平行轴齿轮箱及蜗杆斜齿传动减速后控制线轮正反转实现鞋带的收紧或放松。把自适应收紧模式转化成线轮转角,通过编码器对输出线轮旋转角度精确控制来实现自动收紧到记忆的编码器转角位置。为防止因编码器丢步造成收紧或放松过程种线轮过绕,带齿槽轮可起到对输出斜齿机械限位的作用,同时也可以帮助模块在安装线绳时找初始位置。这种结构的主要缺陷是对带齿槽轮机构的安装位置有要求,如果安装错齿将造成初始位置线轮入线槽与壳体出线孔不在水平一致位置。要解决这一问题要不需引入自动化装配,要不需要追加检测工序,这两种方式都将会导致装配成本增加。另外,该方案采用的编码器、电机控制单元、电机驱动IC等也是导致成本高昂的主要原因。
申请号为201910592887.0的中国发明专利公开了一种自动绕线组件,包括:绕线机构;电机,用以驱动所述绕线机构旋转;第一控制机构,用以控制所述电机正向旋转;第二控制机构,用以控制所述电机反向旋转。该方案通过设置第一控制机构及第二控制机构,控制自动绕线组件不同的旋转方向,以实现其收紧线绳或放松线绳的不同功能;并且通过第一通断机构及第二通断机构,使自动绕线组件在旋转至极限位置时自动停止旋转从而达到极限旋转限位的效果。该方案采用两个通断机构实现自动绕线组件的限位效果,其结构和组装难度较大,同时也具有安装时需要注意安装初始位置这一问题,组装效率低,组装成本较高。
发明内容
本发明旨在克服上述现有技术的至少一种缺陷(不足),提供一种多圈转角机械限位结构,结构简单,易于组装,可以做到组装防呆,提高了组装效率,降低了组装成本。
本发明还提供了一种包含该限位结构的自动绕线模块。
本发明采取的技术方案是,一种多圈转角机械限位结构,包括动轮、光轴和固定壳;所述动轮和所述固定壳之中,其中一者设有螺旋线槽,二者相应设置有一字滑槽;所述光轴安装于所述螺旋线槽和所述一字滑槽中,并能够同时在所述螺旋线槽和所述一字滑槽内滑动。
本发明通过对限位结构进行结构设计,通过在动轮和固定壳上分别设置螺旋线槽或一字滑槽,并用光轴将螺旋线槽及一字滑槽连接,从而实现动轮和固定壳之间的连接,光轴同时在螺旋线槽和一字滑槽内滑动,共同限制动轮可转动的圈数,且动轮的可转动圈数唯一,因而能够实现多圈限位。另外,由于本发明的方案结构简单,易于组装,只需直接将光轴安装到螺旋线槽和一字滑槽内即可实现效果,无初始装配位置,因此实现多圈限位结构组装防呆,提高了组装效率,降低了组装成本。
优选地,所述动轮及所述固定壳采用成型法加工。也就是说,本方案中螺旋线槽相对于动轮或固定壳的位置固定,一字滑槽位置相对于固定壳或动轮的位置固定。
动轮可转动的圈数由螺旋线槽与一字滑槽共同决定。作为一种优选的技术方案,所述螺旋线槽的末端到旋转中心之间的距离≤所述一字滑槽的远端到旋转中心之间的距离,所述螺旋线槽的起始端到旋转中心之间的距离≥所述一字滑槽的近端到旋转中心之间的距离。本方案中,动轮可转动的圈数与螺旋线槽的圈数相同。
其中,本方案中,螺旋线槽的末端指的是螺旋线槽发散的末端,即距离螺旋线槽的旋转中心较远的端部;螺旋线槽的起始端指的是距离螺旋线槽的旋转中心较近的端部;一字滑槽的近端指的是距离螺旋线槽的旋转中心较近的端部;一字滑槽的远端指的是距离螺旋线槽的旋转中心较远的端部。
在本方案中,螺旋线槽的旋转中心也就是动轮的旋转中心。作为一种优选的技术方案,所述一字滑槽的中心线通过所述螺旋线槽的旋转中心。一字滑槽的长度、位置以及螺旋线槽的形状是影响动轮可转圈数的关键因素,当一字滑槽和螺旋线槽的形状和位置确定时,动轮的可转动圈数是唯一的。作为一种优选的技术方案,所述一字滑槽的长度大于或等于所述螺旋线槽起始端到发散的末端之间的距离。在实际应用中,一字滑槽的长度以及螺旋线槽的始末距离不同也并不影响限位的实现,然而处于对制造成本以及产品的强度考量,优选所述一字滑槽的长度大于或等于所述螺旋线槽起始端到发散的末端之间的距离。
作为一种优选的实施方案,所述一字滑槽的中心线通过所述螺旋线槽的旋转中心,且所述螺旋线槽的末端到旋转中心之间的距离等于所述一字滑槽的远端到旋转中心之间的距离,所述螺旋线槽的起始端到旋转中心之间的距离等于所述一字滑槽的近端到旋转中心之间的距离。
优选地,所述螺旋线槽的末端到旋转中心之间的距离等于所述一字滑槽的远端到旋转中心之间的距离,所述螺旋线槽的起始端到旋转中心之间的距离等于所述一字滑槽的近端到旋转中心之间的距离。
作为一种优选的实施方案,所述螺旋线槽的起始端和末端之间的连线与所述一字滑槽的中心线重合,且所述一字滑槽的两端分别与所述螺旋线槽的起始端和末端重合。
作为一种优选的技术方案,所述螺旋线槽可选用等距螺旋线。其中,等距螺旋线也称之为阿基米德螺线,是一个点匀速离开一个固定点的同时又以固定的角速度绕该固定点转动而产生的轨迹。由于等距螺旋线在每个旋转周期内是等距离外扩的,当一字滑槽的中心线通过螺旋线槽的旋转中心时,能够同时保证光轴的匀速左右滑动以及动轮的匀速转动,可以减少部件之间的相互碰撞和磨损,延长产品的使用寿命。
作为一种优选的技术方案,所述光轴包括基座和与所述基座连接的杆部。安装后,所述基座卡住所述螺旋线槽或所述一字滑槽的边缘,所述杆部用于在所述螺旋线槽和所述一字滑槽内滑动。
作为一种优选的技术方案,所述光轴为销钉或呈T字型结构或呈L字型结构。
一种自动绕线模块,包括上述任一种多圈转角机械限位结构。
作为一种优选的技术方案,还包括外壳结构和线轴;所述外壳结构与所述固定壳连接形成第一内腔和第二内腔,所述第一内腔安装有所述动轮和光轴,所述第二内腔设有驱动机构,所述驱动机构用于驱动所述动轮转动;所述外壳结构的外部还设有用于安装所述线轴的线轴安装槽,所述线轴安装槽与所述第一内腔连通,所述线轴与所述动轮固定连接。
本发明提供了一种结构简单自动绕线模块,线轴转动使得线绳缠绕于线轴上,同时由于线轴与限位机构直接相连(线轴与动轮固定连接),实现了多圈旋转限位,组装简单,应用成本低。
作为一种优选的技术方案,所述外壳结构还设有鞋带通道,所述鞋带通道与所述线轴安装槽连通。
作为一种优选的技术方案,所述线轴包括线轴上部、线轴中间部分以及用于与动轮连接的线轴下部,所述线轴中间部分的直径小于所述线轴上部以及线轴下部的直径;所述线轴上部设有将所述线轴上部平分的鞋带凹槽。
与现有技术相比,本发明的有益效果为:本发明通过对转角机械限位结构进行优化,做到了不仅可以实现多圈机械限位,并且可以做到组装防呆,提高了组装效率,降低了产品的组装成本。
附图说明
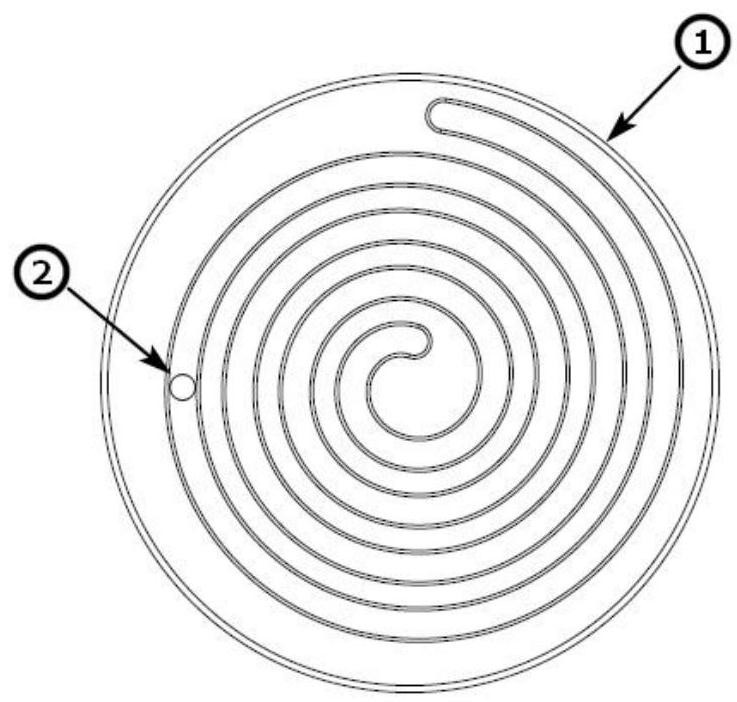
图1为实施例1中动轮的结构示意图。
图2为实施例1中固定壳的结构示意图。
图3为实施例1的剖面图。
图4为光轴的其中一种实施方式的结构示意图。
图5为T型结构光轴的结构示意图。
图6为L型结构光轴的结构示意图。
图7为自动绕线模块的爆炸结构图一。
图8为自动绕线模块的爆炸结构图二。
图9为实施例2中动轮的结构示意图。
图10为实施例2中固定壳的结构示意图。
附图标记:1.动轮;2.光轴;3.固定壳。
具体实施方式
本发明附图仅用于示例性说明,不能理解为对本发明的限制。为了更好说明以下实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
实施例1
本实施例提供了一种多圈转角机械限位结构,如图1~3所示,包括动轮1、光轴2和固定壳3。结合图1与图3可以看出,动轮1设有螺旋线槽,光轴2可以在动轮1的螺旋线槽内滑动。结合图2与图3可以看出,固定壳3设有一字滑槽,光轴2可以在固定壳3的一字滑槽内左右滑动。
当动轮1沿图2所示方向绕自身中心做顺时针转动,光轴2相对于动轮1将做沿螺旋线发散方向运动,光轴2相对于固定坐标系沿水平向左的方向运动,直至碰到螺旋线发散的末端或碰到一字滑槽的左端停止;当动轮1沿图2所示方向逆时针转动,光轴2相对于动轮1将做沿螺旋线收敛的方向运动,光轴2相对于固定壳3将做沿水平向右的方向运动,直至碰到螺旋线的起始端或碰到一字滑槽的右端停止。
动轮1可转动的圈数由动轮螺旋线与固定壳一字滑槽共同决定,当动轮1螺旋线槽发散的末端到旋转中心的距离≤一字滑槽左端到旋转中心的距离,螺旋线槽起始端到旋转中心距离≥一字滑槽右端到旋转中心的距离时,动轮1可转动的圈数与螺旋线的圈数相同。
在本实施例中,如图1~3所示,动轮1的像旋转中心即为螺旋线槽的旋转中心,一字滑槽的中心线通过螺旋线槽的旋转中心,且螺旋线槽的末端到旋转中心之间的距离等于一字滑槽的远端到旋转中心之间的距离,螺旋线槽的起始端到旋转中心之间的距离等于一字滑槽的近端到旋转中心之间的距离,一字滑槽的两端均位于旋转中心的同侧。优选螺旋线槽的起始端和末端之间的连线与一字滑槽的中心线重合,且一字滑槽的两端分别与所述螺旋线槽的起始端和末端重合。
其中,动轮1及固定壳3往往会采用成型法加工,即螺旋线槽相对于动轮1的位置固定,一字滑槽位置相对于壳体固定。只要将光轴装配到动轮1螺旋线槽与固定壳3一字滑槽之间,动轮1转动的转动极限位置就是唯一的。因此可以做到组装防呆,提高了组装效率,降低了组装成本。
本实施例中螺旋线槽采用等距螺旋线,由于等距螺旋线在每个旋转周期内是等距离外扩的,当一字滑槽的中心线通过螺旋线槽的旋转中心时,能够同时保证光轴的匀速左右滑动以及动轮的匀速转动。
在实施过程中,光轴2可以是单独的柱体(截面形状不限),其长度可以使其同时装配在螺旋线槽及一字滑槽中。光轴2还可以是出柱体外在柱体上还设置突出的平台或连接其他柱体,或连接基座等能够使光轴在装配时卡住所述螺旋线槽或所述一字滑槽的边缘均可,如图4~6所示,光轴2可以采用是销钉状结构(如图4),还可以是T形结构(如图5)或L形结构(如图6)等。
本实施例所提供的限位结构的结构简单,易于组装,只需将动轮和固定壳装配后,将光轴安装到螺旋线槽和一字滑槽内即可实现限位效果,本方案无初始装配位置,且由于动轮的可转动圈数唯一,因此能够实现多圈限位及组装防呆,组装效率高,降低了组装成本。
本实施例还提供了将上述多圈转角机械限位结构应用到自动绕线模块的实例,如图7~8所示,自动绕线模块的结构具体为:除了多圈转角机械限位结构10外,还包括外壳结构20和线轴30。
其中,外壳结构20包括上下两层结构,其上层设有用于安装线轴30的线轴安装槽201,线轴安装槽201两侧还设有鞋带通道202,其下层设有两个相互连通的腔体槽,其中一个腔体槽与线轴安装槽201连通。线轴30包括线轴上部、直径减小的线轴中间部分301以及用于与动轮连接的线轴下部303,线轴上部设有将所述线轴上部平分的鞋带凹槽302。其中,线轴中间部分301的直径小于线轴上部以及线轴下部303。
装配时,外壳结构20与固定壳30连接形成第一内腔和第二内腔,其中第一内腔与线轴安装槽201连通,第一内腔与第二内腔连通,多圈转角机械限位结构10设于第一内腔中。其中,固定壳3设有一字滑槽;动轮1设置于第一内腔中,动轮1为齿轮,且一面设有螺旋线槽,另一面设有突出的安装台,设有螺旋线槽的一面与固定壳上的一字滑槽配合,且螺旋线槽与一字滑槽之间通过光轴2连接。第二内腔设有驱动机构(图中未示出),驱动机构用于驱动动轮1转动,在实际应用中,驱动机构可以采用通过蜗杆与动轮1啮合的方式带动动轮1转动。另外,第一内腔与线轴安装槽201之间设有通孔,通孔中安装有轴承,动轮1通过其突出的安装台安装于通孔上,当外壳结构20与固定壳30连接后,动轮1的安装台可以突出于或齐平线轴安装槽201,安装台上设有安装孔,线轴可通过螺钉安装的方式实现与动轮1的固定连接。
在实际使用时,线绳延伸穿过鞋带通道202,进入鞋带凹槽302后再穿过鞋带通道202。当驱动驱动机构,线轴转动使得线绳缠绕于线轴上,同时由于线轴与限位机构直接相连(线轴与动轮固定连接),满足极限旋转限位,且结构简单,可实现多圈限位,组装效率高,组装成本低。
- 一种多圈转角机械限位结构及自动绕线模块
- 一种柔性多圈转角限位结构及自动绕线模块