自主移动机器人、待对接装置、物流对接系统和对接方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及物流技术领域,具体地,涉及自主移动机器人(AMR,Automatic MobileRobot)、待对接装置、物流对接系统和对接方法。
背景技术
在许多物流应用场景(例如制造工厂原材料仓到生产线以及到产成品运输的全流程作业过程、仓储和生产线的物料自动搬运过程)中,需要将自主移动机器人或者自主移动机器人的上装平台与待对接装置的物料平台(诸如传送带、辊筒、托盘、料架、货架等)进行对接,并且对对接精度有较高的要求。通常要求误差控制在5mm以内。
在已知的物流对接系统中,在自主移动机器人与待对接装置的对接过程中,通常通过传感器来对自主移动机器人和待对接装置的位置进行矫正。由于对接精度要求高,常规的传感器无法满足精度要求,而高精度的传感器价格高昂。此外,通过高精度的传感器进行精确对接时,需要进行大量的数据采集并且需要基于所采集的大量的数据进行复杂的控制,因此,需要较长的时间来实现精确对接,对接速度慢。
因此,需要提供自主移动机器人、待对接装置、物流对接系统和对接方法,以解决或至少减轻上述现有技术中所存在的至少一部分缺点。
发明内容
在本发明的第一方面中,提供一种自主移动机器人。所述自主移动机器人包括第一对接部,所述第一对接部用于与待与所述自主移动机器人对接的待对接装置的第二对接部对接。其中,所述第一对接部的形状与所述第二对接部的形状互补,并且所述第一对接部设置有至少一个第一宽度渐变区。
可选地,所述第一对接部为突出部,以与形成为凹部的所述第二对接部对接,所述突出部的宽度沿突出方向逐渐减小。
可选地,所述突出部的尺寸被构造为小于待与所述突出部对接的所述凹部的尺寸。
可选地,所述第一宽度渐变区的截面为三角形、半圆形、椭圆形中的一种。
可选地,所述自主移动机器人包括底盘和连接在所述底盘上方的上装平台,所述第一对接部设置在所述上装平台上。
可选地,所述第一对接部可拆卸地连接至所述上装平台。
可选地,所述自主移动机器人用于与所述待对接装置进行侧向对接,并且所述自主移动机器人包括至少一个舵轮。
在本发明的第二方面中,提供一种待对接装置,所述待对接装置包括物料平台。所述待对接装置用于与上述的自主移动机器人配合使用,所述待对接装置包括用于与所述第一对接部对接的所述第二对接部,所述第二对接部设置有至少一个第二宽度渐变区。
可选地所述第二对接部可拆卸地连接至所述物料平台。
在本发明的第三方面中,提供一种物流对接系统。所述物流对接系统包括:如上所述的自主移动机器人;以及如上所述的待对接装置。
可选地,所述第一对接部的接触面和所述第二对接部的接触面中的至少一个为光滑表面或者设置有滚动接触部。
可选地,所述第一对接部和/或所述第二对接部设置有接触检测装置和/或对准检测装置。
在本发明的第四方面中,提供一种对接方法。所述对接方法用于上述的物流对接系统。所述对接方法包括:粗对接:控制所述自主移动机器人朝向所述待对接装置移动直到所述第一对接部与所述第二对接部接触;对接检测:判断所述第一对接部是否与所述第二对接部精确对接;以及物理对接:当所述第一对接部与所述第二对接部未精确对接时,控制所述自主移动机器人朝向所述待对接装置移动直到所述第一对接部与所述第二对接部精确对接。其中,在所述物理对接步骤中,当所述第一对接部的所述第一宽度渐变区与所述第二对接部的所述第二宽度渐变区接触时,所述第一对接部与所述第二对接部发生相互作用,以对所述第一对接部进行物理纠偏。
可选地,在所述物理对接步骤中所述自主移动机器人的动力大于在所述粗对接步骤中所述自主移动机器人的动力。
可选地,所述对接检测包括检测所述第一对接部的第一检测点是否与所述第二对接部的相应的第二检测点接触和/或对准,并且在所述第一检测点接触和/或对准所述第二检测点时判定所述第一对接部与所述第二对接部精确对接。
根据本发明的方案,在自主移动机器人与待对接装置的对接过程中,无需使用价格高昂的传感器,成本较低。而且不需要大量采集数据并且不需要进行复杂的控制,节省了时间,提高了对接速度。
附图说明
下面参照附图将对本发明的特征、优点以及示例性实施方式的技术上和工业上的意义进行描述,在附图中,相同的附图标记指示相同的元件,并且其中:
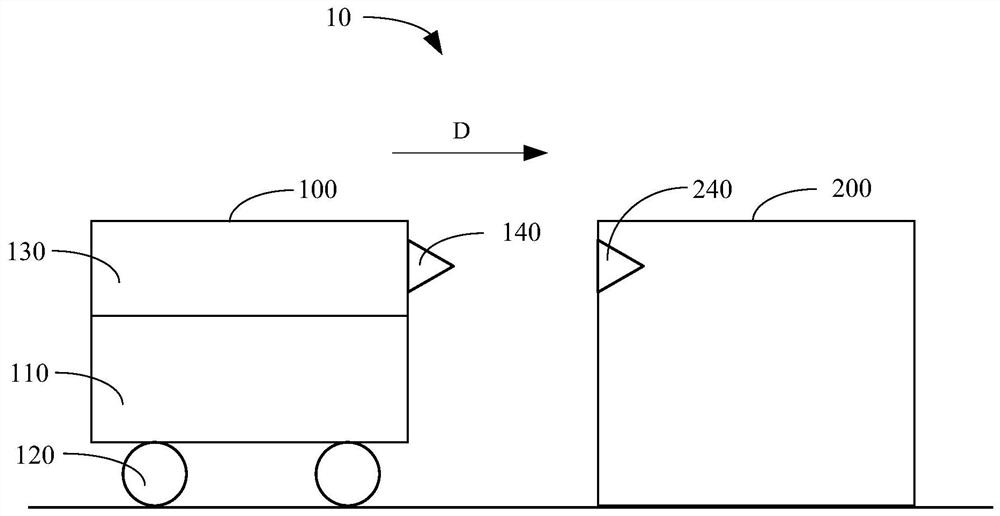
图1示出了根据本发明的一个优选实施方式的物流对接系统的竖向截面示意图,其中,自主移动机器人和待对接装置处于未对接的状态;
图2示出了根据本发明的一个优选实施方式的物流对接系统的竖向截面示意图,其中,自主移动机器人和待对接装置处于正在对接的状态,并且开始对接时自主移动机器人的第一对接部恰好处于准确位置;
图3示出了根据本发明的一个优选实施方式的物流对接系统的水平截面示意图,其中,自主移动机器人和待对接装置处于正在对接的状态,并且开始对接时自主移动机器人的第一对接部偏离准确位置;
图4示出了根据本发明的一个优选实施方式的物流对接系统的竖向截面示意图,其中,自主移动机器人和待对接装置处于已对接好的状态;以及
图5示出了根据本发明的一个优选实施方式的对接方法的示意性流程图。
具体实施方式
下面参照附图对本发明示例性实施方式进行详细描述。对示例性实施方式的描述仅仅是出于示范目的,而绝不是对本发明及其应用或用法的限制。而且,图中各部件的尺寸和比例也仅仅是示意性的,并不严格对应于实际产品。
本发明提供一种自主移动机器人100、与该自主移动机器人100配合使用的待对接装置200以及包括该自主移动机器人100和该待对接装置200的物流对接系统10。图1示出了根据本发明的一个优选实施方式的物流对接系统10的竖向截面示意图,其中,自主移动机器人100和待对接装置200处于未对接的状态。图2示出了根据本发明的一个优选实施方式的物流对接系统10的竖向截面示意图,其中,自主移动机器人100和待对接装置200处于正在对接的状态,并且开始对接时自主移动机器人100的第一对接部140恰好处于准确位置。图3示出了根据本发明的一个优选实施方式的物流对接系统10的水平截面示意图,其中,自主移动机器人100和待对接装置200处于正在对接的状态,并且开始对接时自主移动机器人100的第一对接部140偏离准确位置。图4示出了根据本发明的一个优选实施方式的物流对接系统10的竖向截面示意图,其中,自主移动机器人100和待对接装置200处于已对接好的状态。下面将结合图1至图4详细描述根据本发明的一个优选实施方式的物流对接系统10、该物流对接系统10中所包括的自主移动机器人100以及待对接装置200。
如图1至图4所示,物流对接系统10包括自主移动机器人100和待与自主移动机器人100对接的待对接装置200。待对接装置200与自主移动机器人100配合使用。自主移动机器人100可以与待对接装置200进行顶升对接、正对接、侧向对接等。待对接装置200通常包括物料平台,例如传送带、辊筒、托盘、料架、货架等。自主移动机器人100与待对接装置200对接之后能够实现仓储或生产线的重型物料的自动搬运、货架搬运、自动仓储系统和辊筒传送的自动装卸等。物流对接系统10可以包括多个待对接装置200,该多个待对接装置200可以共用同一个自主移动机器人100,也可以配备单独的自主移动机器人100。
如图1、图2和图4所示,自主移动机器人100包括底盘110。底盘110下方设置有移动装置120,该移动装置120能够在驱动单元(未示出)的驱动下移动或转动。驱动单元可以设置在底盘110内。移动装置120可以是车轮、履带等。其中,当自主移动机器人100用于与待对接装置200进行侧向对接时,自主移动机器人100包括至少一个舵轮。通过舵轮转向实现转弯,从而能够使自主移动机器人100侧向行驶,以与待对接装置200进行侧向对接。自主移动机器人100还可以包括设置在底盘110上方的上装平台130。上装平台130可以包括顶升、辊筒等。上装平台130可以与底盘110为一体。优选地,上装平台130可以可拆卸地连接在底盘110上方,以便于根据实际需要更换上装平台130,从而使得不同的上装平台130可以共用同一个底盘110。
根据本发明的构思,如图1至图4所示,自主移动机器人100包括第一对接部140,待对接装置200包括第二对接部240。第一对接部140和第二对接部240可以分别设置在自主移动机器人100和待对接装置200的任何合适的地方。例如,第一对接部140可以设置在自主移动机器人100的上装平台130上,第二对接部240可以设置在待对接装置200的物料平台上。优选地,第一对接部140可以可拆卸地连接至自主移动机器人100的上装平台130或者其他部件。同样优选地,第二对接部240可以可拆卸地连接至待对接装置200的物料平台或其他部件。第一对接部140用于沿对接方向D与第二对接部240对接,从而实现自主移动机器人100与待对接装置200的对接。“对接方向”是指对接过程中自主移动机器人100的第一对接部140朝向待对接装置200的第二对接部240移动的方向。第一对接部140的形状与第二对接部240的形状互补。例如,第一对接部140和第二对接部240中的一个可以为突出部,另一个可以为凹部。需要说明的是,本文所说的“互补”可以包括“完全互补”,即二者轮廓和大小完全适配或刚好适配,也可以包括“大致互补”,即二者轮廓适配,但是匹配之后二者之间可以略微间隔开。第一对接部140和第二对接部240互补,可以使得二者之间的对接更可靠。第一对接部140设置有至少一个第一宽度渐变区,即宽度逐渐变化的区域。第一宽度渐变区的截面可以为三角形、半圆形、椭圆形中的任何一种。可以理解,与第一对接部140的形状互补的第二对接部240也相应地设置有至少一个第二宽度渐变区,以与第一对接部140的第一宽度渐变区相适配。第二宽度渐变区的截面同样可以为三角形、半圆形、椭圆形中的任何一种。需要说明的是,本文所说的“宽度”是指在对接方向D所在的平面内垂直于对接方向D的方向上的尺寸。具体地,在如图1至图4所示的实施方式中,“宽度”是指在水平面内垂直于对接方向D的方向上的尺寸。
如此,当需要将自主移动机器人100与待对接装置200进行对接时,自主移动机器人100移动至靠近待对接装置200的区域中,使得自主移动机器人100的第一对接部140与待对接装置200的第二对接部240大致对准。该过程可以借助于激光雷达和/或视觉传感器实现。激光雷达和/或视觉传感器相较于高精度传感器而言,成本低。随后自主移动机器人100相对于待对接装置200沿对接方向D向前移动。需要说明的是,本文中所使用的“前”、“后”、“左”、“右”等方向性术语是相对于自主移动机器人100朝向待对接装置200沿对接方向D移动时的移动方向而言的。假设人朝向对接方向D坐在自主移动机器人100上,人所朝向的方向(也即对接方向D)为“前”,与之相反的为“后”。人的左侧则为“左”,右侧则为“右”。
如图2所示,如果自主移动机器人100移动至靠近待对接装置200的区域中开始与待对接装置200对接时自主移动机器人100的第一对接部140恰好处于准确位置,则自主移动机器人100沿对接方向D继续向前移动直到第一对接部140接触第二对接部240即可以实现第一对接部140和第二对接部240的精确对接。在第一对接部140和第二对接部240精确对接之前,第一对接部140不会接触第二对接部240。
如图3所示,如果自主移动机器人100移动至靠近待对接装置200的区域中开始与待对接装置200对接时自主移动机器人100的第一对接部140没有处于准确位置,例如偏右,则当自主移动机器人100沿对接方向D继续向前移动时,第一对接部140与第二对接部240刚刚接触时,第一对接部140位于准确位置的右侧,自主移动机器人100的第一对接部140的右侧首先接触待对接装置200的第二对接部240的右侧。当第一对接部140的第一宽度渐变区接触第二对接部240的右侧的第二宽度渐变区时,自主移动机器人100沿对接方向D朝向待对接装置200继续向前移动,第一对接部140会受到第一对接部140和第二对接部240接触后垂直于接触面的力F,这个力可以分解成垂直于对接方向D并且指向左侧的第一分力F1和与对接方向D相反的第二分力F2,其中,第一分力F1能够将第一对接部140向左推动,从而实现物理纠偏,使得第一对接部140在沿对接方向D向前移动的同时向左朝向准确位置移动,从而实现第一对接部140与第二对接部240的精确对接。在该过程中,无需使用价格高昂的传感器,成本较低。而且不需要大量采集数据并且不需要进行复杂的控制,节省了时间,提高了对接速度。
如上所述地,第一对接部140和第二对接部240中的一个可以为突出部,另一个可以为凹部。优选地,在本实施方式中,突出部设置在自主移动机器人100上,突出部的宽度沿突出方向逐渐减小,以形成第一宽度渐变区,凹部设置在待对接装置200上。即,第一对接部140为突出部,第二对接部240形成为凹部。在对接过程中,通常为自主移动机器人100的第一对接部140沿对接方向D朝向待对接装置200的第二对接部240移动,第二对接部240通常保持静止。因此将第一对接部140设置为突出部便于对接以及在对接过程中进行物理纠偏。
突出部(即第一对接部140)的尺寸可以被构造为小于或等于待与该突出部对接的凹部(即第二对接部240)的尺寸。优选地,突出部的尺寸略小于待与该突出部对接的凹部的尺寸。如此,便于在对接完成后对突出部的位置进行微调,以使对接更精确。
可选地,第一对接部140和/或第二对接部240上可以设置有接触检测装置和/或对准检测装置,以检测第一对接部140与第二对接部240是否精确对接。接触检测装置和/或对准检测装置可以设置在第一对接部140和/或第二对接部240的相应的检测点上,以检测第一对接部140和/或第二对接部240上的相应的检测点是否接触和/或对准,从而判定第一对接部140与第二对接部240是否精确对接。接触检测装置可以例如通过回路检测实现。
可选地,第一对接部140的接触面和第二对接部240的接触面中的至少一个为光滑表面,以减小对接过程中第一对接部140与第二对接部240之间的摩擦力。可选地,第一对接部140的接触面和第二对接部240的接触面中的至少一个可以设置有滚动接触部。滚动接触部例如可以为万向珠。通过滚动接触部,可以将第一对接部140和第二对接部240之间的滑动摩擦转变成滚动摩擦,摩擦力小,便于第一对接部140与第二对接部240的对接。
在本发明的又一方面中,提供一种用于上述物流对接系统10的对接方法。图5示出了根据本发明的一个优选实施方式的对接方法的示意性流程图。下面将结合图5详细描述根据本发明的一个优选实施方式的对接方法。
如图5所示,根据本发明的一个优选实施方式的对接方法主要包括如下步骤:S310:粗对接;S320:对接检测;以及S330:物理对接。
在S310粗对接的步骤中,控制自主移动机器人100朝向待对接装置200移动直到自主移动机器人100的第一对接部140与待对接装置200的第二对接部240接触。粗对接过程无需价格高昂的高精度传感器。例如,粗对接过程可以借助于激光雷达和/或视觉传感器完成。
在S320对接检测的步骤中,判断自主移动机器人100的第一对接部140是否与待对接装置200的第二对接部240精确对接。该步骤发生在第一对接部140和第二对接部240刚刚接触时。在粗对接刚开始时,自主移动机器人100的第一对接部140可能恰好处于准确位置(如图2所示),则自主移动机器人100沿对接方向D继续向前移动直到第一对接部140接触第二对接部240即可以实现第一对接部140和第二对接部240的精确对接。在第一对接部140和第二对接部240精确对接之前,第一对接部140不会接触第二对接部240。也就是说,粗对接完成后,第一对接部140和第二对接部240就精确对接了。然而,在粗对接刚开始时,自主移动机器人100的第一对接部140也可能没有处于准确位置,例如偏右(如图3所示)。在这种情况下,当第一对接部140与第二对接部240刚刚接触时第一对接部140也会偏离准确位置,第一对接部140和第二对接部240没有精确对接。在这种情况下,则需要进行S330物理对接的步骤,这将在下文详细描述。
判断第一对接部140是否与第二对接部240精确对接可以包括检测第一对接部140的第一检测点是否与第二对接部240的相应的第二检测点接触和/或对准,并且在第一检测点接触和/或对准第二检测点时判定第一对接部140与第二对接部240精确对接。例如,第一检测点可以是形成为突出部的第一对接部140的尖端,相应地,第二检测点则可以是形成为凹部的第二对接部240的凹部底部中心。当然,第一检测点和第二检测点还可以分别是第一对接部140和第二对接部240的相对应的其他部位。第一检测点是否接触和/或对准第二检测点可以通过如上文所描述的设置在第一对接部140和/或第二对接部240上的接触检测装置和/或对准检测装置实现。例如,接触检测装置可以通过回路检测实现。
判断第一对接部140是否与第二对接部240精确对接也可以通过判断在第一对接部140与第二对接部240接触后,自主移动机器人100是否还能相对于待对接装置200沿对接方向D向前移动来实现。如果第一对接部140和第二对接部240接触后,自主移动机器人100还能够继续沿对接方向D移动,则判定第一对接部140未与第二对接部240精确对接。如果第一对接部140和第二对接部240接触后,自主移动机器人100无法继续沿对接方向D移动,则判定第一对接部140已与第二对接部240精确对接。
在S330物理对接步骤中,控制自主移动机器人100朝向待对接装置200移动直到第一对接部140与第二对接部240精确对接。在S330物理对接步骤中,当第一对接部140的第一宽度渐变区与第二对接部240的第二宽度渐变区接触时,第一对接部140与第二对接部240发生相互作用,以对第一对接部140进行物理纠偏。在该物理纠偏过程中,第一对接部140与第二对接部240的相互作用如上文针对图3详细描述的,这里为了简洁,不再赘述。
在S330物理对接步骤中,第一对接部140与第二对接部240发生相互作用而进行物理纠偏的过程中可能会使得自主移动机器人100的移动转变成转动等复杂的运动,使得第一对接部140与第二对接部240精确对接之后自主移动机器人100的第一对接部140与待对接装置200的第二对接部240不平行。可选地,在第一对接部140与第二对接部240精确对接之后,还可以对自主移动机器人100的位置进行微调,以使得第一对接部140和第二对接部240平行,二者之间的对接更精确。
可选地,在S310粗对接步骤中自主移动机器人100的移动速率(第一速率)与在S330物理对接步骤中自主移动机器人100的移动速率(第二速率)可以不同。优选地,第二速率小于第一速率。在S310粗对接步骤中,自主移动机器人100以较大的第一速率朝向待对接装置200移动可以提高整个对接过程的速度,节省时间;而在S330物理对接步骤中,自主移动机器人100的第一对接部140在沿对接方向D朝向第二对接部240向前移动的同时还会向左或向右朝向准确位置移动以实现物理纠偏,因此较小的第二速率可以进一步提高第一对接部140与第二对接部240对接的精确度。
优选地,在S330物理对接步骤中自主移动机器人100的动力大于在S310粗对接步骤中自主移动机器人100的动力,以更好的利用接触面的相互作用力,实现精确对接。
综上所述,根据本发明的对接方法,无需使用价格高昂的传感器,成本较低。而且不需要大量采集数据并且不需要进行复杂的控制,节省了时间,提高了对接速度。
在本说明书中,每当提及“示例性实施方式”、“优选实施方式”、“一个实施方式”等时意味着针对该实施方式描述的具体的特征、结构或特点包括在本发明的至少一个实施方式中。这些用词在本说明书中不同地方的出现不一定都指代同一实施方式。此外,当针对任一实施方式/实施方式描述具体的特征、结构或特点时,应当认为本领域技术人员也能够在所有所述实施方式中的其它实施方式中实现这种特征、结构或特点。
以上详细描述了本发明的实施方式。然而,本发明的方面不限于上述实施方式。在不脱离本发明的范围的情况下,各种改型和替换均可以应用到上述实施方式中。
- 自主移动机器人、待对接装置、物流对接系统和对接方法
- 一种自主移动机器人及其自动对接的控制方法和装置