一种多连杆液压压力机
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及一种多连杆液压压力机。
背景技术
液压压力机是通过对液压油压力的控制来实现压力的控制,控制方法简单、易于实现。
缺点是如果想获取较大压力时,方法一:增大油压;方法二:增大油缸直径;方法三:并联多个油缸。
以上方法都存在不足,方法一增大油压对密封要求较高,增大了油液渗漏的风险;方法二增大了液压缸尺寸,提高了成本;方法三并联多个油缸,不仅提高成本,而且多油缸同步控制难度较大,不易实现。
发明内容
本发明提出一种多连杆液压压力机,采取的技术方案为:
一种多连杆液压压力机,包括机身、液压缸、副滑块、主滑块和两条相同的多连杆支链,液压缸的缸筒铰接在机身上,液压缸内活塞杆自由端铰接副滑块,副滑块滑动置于机身上,主滑块滑动置于机身上,主滑块的滑动方向与副滑块的滑动方向相同;两条相同的多连杆支链关于液压缸对称设置,多连杆支链连接副滑块与主滑块;
两条相同的多连杆支链均包括推杆、滑块、摆杆、杠杆和压杆,推杆一端铰接副滑块,推杆另一端铰接滑块,滑块滑动置于机身上,滑块的滑动方向与副滑块的滑动方向垂直,摆杆一端铰接滑块,摆杆另一端铰接杠杆的一端,杠杆的另一端铰接在机身上,杠杆上的中间支点铰接压杆的一端,压杆的另一端铰接主滑块。
本发明多连杆液压压力机,通过多连杆支链的增力机构,实现了三次增力,使得只用一个油缸的驱动就产生多个同等油缸并联才能得到的输出压力。同时,采用左右对称的并联机构,提高机构的稳定性、承载能力与刚度。
对本发明技术方案的优选,副滑块、滑块和主滑块均与机身之间设置移动副。移动副的设置限制副滑块、滑块和主滑块在机身上的移动方向。
本发明还提出一种多连杆液压压力机,包括机身、液压缸、副滑块、主滑块和一条多连杆支链,液压缸的缸筒铰接在机身上,液压缸内活塞杆自由端铰接副滑块,副滑块滑动置于机身上,主滑块滑动置于机身上,多连杆支链连接副滑块与主滑块;
多连杆支链包括推杆、滑块、摆杆、杠杆和压杆,推杆一端铰接副滑块,推杆另一端铰接滑块,滑块滑动置于机身上,滑块的滑动方向与副滑块的滑动方向垂直,摆杆一端铰接滑块,摆杆另一端铰接杠杆的一端,杠杆的另一端铰接在机身上,杠杆上的中间支点铰接压杆的一端,压杆的另一端铰接主滑块。
本发明多连杆液压压力机,通过多连杆支链的增力机构,实现了三次增力,使得只用一个油缸的驱动就产生多个同等油缸并联才能得到的输出压力。
对本发明技术方案的优选,副滑块、滑块和主滑块均与机身之间设置移动副。移动副的设置限制副滑块、滑块和主滑块在机身上的移动方向。
本技术方案中涉及的液压缸、移动副均为已知产品,直接购买获得。
本发明与现有技术相比,其有益效果是:
本发明的多连杆液压压力机,通过多连杆支链的增力机构,实现了三次增力,使得只用一个油缸的驱动就产生多个同等油缸并联才能得到的输出压力。
附图说明
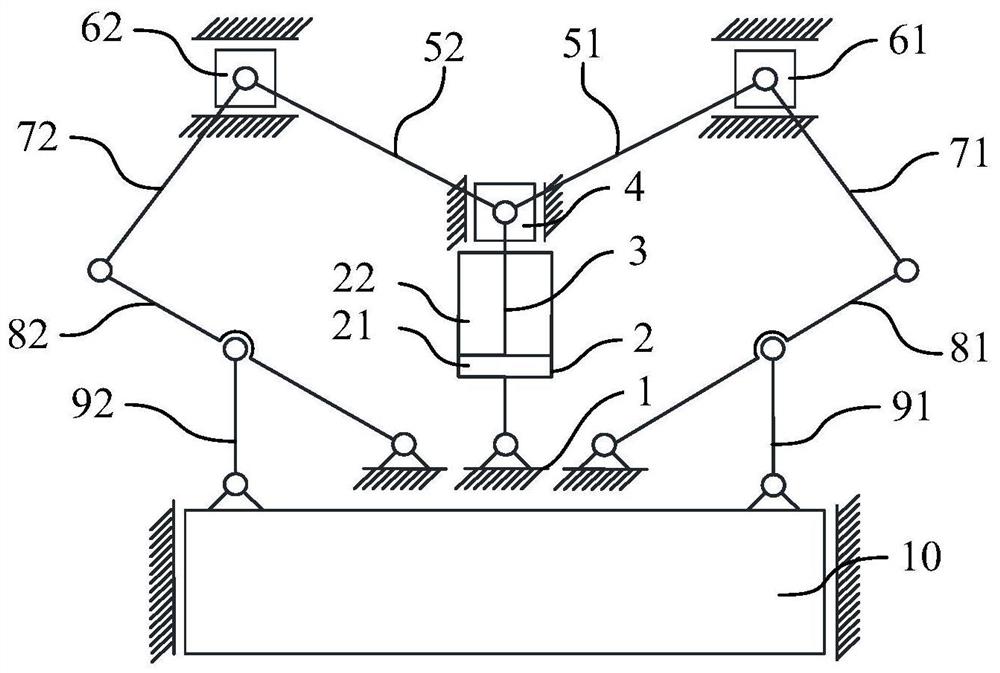
图1是实施例1的多连杆液压压力机的平面示意图。
图2是实施例2的多连杆液压压力机的平面示意图。
具体实施方式
下面对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
为使本发明的内容更加明显易懂,以下结合附图1-附图2和具体实施方式做进一步的描述。
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
实施例1:
本实施例中,以液压缸2内活塞杆3的伸缩推动副滑块4在竖直方向上滑动为例,进一步说明技术方案。
如图1所示,一种多连杆液压压力机,包括机身1、液压缸2、副滑块4、主滑块10和两条相同的多连杆支链。
液压缸2的缸筒铰链在机身1上,液压缸2内活塞杆3自由端铰接副滑块4,副滑块4滑动置于机身1上,副滑块4与机身1之间设置移动副,副滑块4仅能在竖直方向上移动。主滑块10滑动置于机身1上,主滑块10的滑动方向与副滑块4的滑动方向相同;主滑块10与机身1之间设置移动副,主滑块10仅能在竖直方向上移动。
两条相同的多连杆支链关于液压缸2对称设置,多连杆支链连接副滑块4与主滑块10;两条相同的多连杆支链,采用左右对称的并联机构,提高机构的稳定性、承载能力与刚度。
如图1所示,本实施例中两条相同的多连杆支链,定义为左多连杆支链和右多连杆支链。本实施例中,采用左右对称的多连杆支链,提高机构的稳定性、承载能力与刚度。
左多连杆支链包括左推杆52、左滑块62、左摆杆72、左杠杆82和左压杆92,右多连杆支链包括右推杆51、右滑块61、右摆杆71、右杠杆81和右压杆91。
右多连杆支链内,副滑块4右侧通过右推杆51与右滑块61相连,副滑块4与右推杆51之间铰接,右滑块61通过移动副滑动置于机身1上,右滑块61的滑动方向与副滑块4的滑动方向垂直,右滑块61在移动副的作用下在水平方向上移动;右滑块61通过铰接与右摆杆71一端相连,右摆杆71另一端通过铰接与右杠杆81一端相连,右杠杆81另一端通过铰接与机身1相连,右杠杆81中部通过铰接与右压杆91相连,右压杆91通过铰接与主滑块10相连。主滑块10与机身1之间设置移动副,移动副使得主滑块10仅能在竖直方向上移动。
同理,左多连杆支链内,副滑块4左侧通过左推杆52与左滑块62相连,左滑块62与左推杆52之间铰接,左滑块62通过移动副滑动置于机身1上,左滑块62的滑动方向与副滑块4的滑动方向垂直,左滑块62在移动副的作用下在水平方向上移动;左滑块62通过铰接与左摆杆72一端相连,左摆杆72另一端通过铰接与左杠杆82一端相连,左杠杆82另一端通过铰接与机身1相连,左杠杆82中部通过铰接与左压杆92相连,左压杆92通过铰接与主滑块10相连。
本实施例中,所有铰接点都为一个转动自由度的连接方式,此种连接方式为本技术领域内的已知连接方式,本领域内的技术人员都已知。因此,对于此种连接方式的具体结构本实施例不作具体的限定和说明。
如图1所示,本实施例中,在左压杆92与主滑块10之间的铰接点以及右压杆91与主滑块10之间的铰接点,还可以采用球铰,由于球铰的接触面大,能承受较大的力。
本实施例的工作过程如下:
在工作时,液压缸2的无杆腔21注入高压油,推动活塞杆3向上移动,活塞杆3推动副滑块4向上移动,副滑块4通过右推杆51推动右滑块61水平向右移动,并带动右摆杆71顺时针摆动,同时右摆杆71向下推动右杠杆81顺时针转动,右杠杆81顺时针转动推动右压杆91向下推动主滑块10向下移动;同样,副滑块4同时,可通过左推杆52推动左滑块62水平向左移动,并带动左摆杆72逆时针摆动,同时左摆杆72向下推动左杠杆82逆时针转动,左杠杆82逆时针转动推动左压杆92向下推动主滑块10向下移动;主滑块10向下移动进行作业。
冲压动作完成后,液压缸2有杆腔22注入高压油,推动活塞杆3向下移动,活塞杆3拉动副滑块4向下移动,副滑块4通过右推杆51推动右滑块水平向左移动,并带动右摆杆71逆时针摆动,同时右摆杆71向上拉动右杠杆81逆时针转动,右杠杆81逆时针转动拉动右压杆91向上拉动主滑块向上移动;左侧的动作与右侧对称。最终,主滑块10向上移动回到初始位置,完成整个作业过程。
本实施例中,通过多连杆支链的增力机构,实现了三次增力,使得只用一个油缸的驱动就产生多个同等油缸并联才能得到的输出压力。
本实施例中三个增力过程如下:
(1)副滑块4向上运动,通过右推杆51推动右滑块61向右移动,通过左推杆52推动左滑块62向右移动;
(2)右滑块61向右移动,推动右摆杆71顺时针转动;左滑块62向左移动,推动左摆杆72逆时针转动;
(3)右摆杆71向下推动右杠杆81顺时针转动,右杠杆81顺时针转动推动右压杆91向下推动主滑块10向下移动;同时,左摆杆72向下推动左杠杆82逆时针转动,左杠杆82逆时针转动推动左压杆92向下推动主滑块10向下移动。
经过三次增力,可以大大提高冲压力。
实施例2:
本实施例中,以液压缸2内活塞杆3的伸缩推动副滑块4在竖直方向上滑动为例,进一步说明技术方案。
如图2所示,一种多连杆液压压力机,包括机身1、液压缸2、副滑块4、主滑块10和一条多连杆支链。液压缸2的缸筒铰接在机身1上,液压缸2内活塞杆3自由端铰接副滑块4,副滑块4滑动置于机身1上,副滑块4与机身1之间设置移动副,副滑块4仅能在竖直方向上移动。主滑块10滑动置于机身1上,主滑块10与机身1之间设置移动副,主滑块10在机身上移动,多连杆支链连接副滑块4与主滑块10。
定义本实施例中多连杆支链为右多连杆支链,右多连杆支链包括右推杆51、右滑块61、右摆杆71、右杠杆81和右压杆91。
右多连杆支链内,副滑块4右侧通过右推杆51与右滑块61相连,副滑块4与右推杆51之间铰接,右滑块61通过移动副滑动置于机身1上,右滑块61的滑动方向与副滑块4的滑动方向垂直,右滑块61在移动副的作用下在水平方向上移动;右滑块61通过铰接与右摆杆71一端相连,右摆杆71另一端通过铰接与右杠杆81一端相连,右杠杆81另一端通过铰接与机身1相连,右杠杆81中部通过铰接与右压杆91相连,右压杆91通过铰接与主滑块10相连。
本实施例中,所有铰接点都为一个转动自由度的连接方式,此种连接方式为本技术领域内的已知连接方式,本领域内的技术人员都已知。因此,对于此种连接方式的具体结构本实施例不作具体的限定和说明。
如图1所示,本实施例中,在右压杆91与主滑块10之间的铰接点,还可以采用球铰,由于球铰的接触面大,能承受较大的力。
本实施例的工作过程如下:
在工作时,液压缸2的无杆腔21注入高压油,推动活塞杆3向上移动,活塞杆3推动副滑块4向上移动,副滑块4通过右推杆51推动右滑块水平向右移动,并带动右摆杆71顺时针摆动,同时右摆杆71向下推动右杠杆81顺时针转动,右杠杆81顺时针转动推动右压杆91向下推动主滑块10向下移动;主滑块10向下移动进行作业。
作业动作完成后,液压缸2有杆腔22注入高压油,推动活塞杆3向下移动,活塞杆3拉动副滑块4向下移动,副滑块4通过右推杆51推动右滑块水平向左移动,并带动右摆杆71逆时针摆动,同时右摆杆71向上拉动右杠杆81逆时针转动,右杠杆81逆时针转动拉动右压杆91向上拉动主滑块10向上移动。最终,主滑块10向上移动回到初始位置,完成整个作业过程。
本实施例中,通过多连杆支链的增力机构,实现了三次增力,使得只用一个油缸的驱动就产生多个同等油缸并联才能得到的输出压力。
本实施例中三个增力过程如下:
(1)副滑块4向上运动,通过右推杆51推动右滑块61向右移动;
(2)右滑块61向右移动,推动右摆杆71顺时针转动;
(3)右摆杆71向下推动右杠杆81顺时针转动,右杠杆81顺时针转动推动右压杆91向下推动主滑块10向下移动。
经过三次增力,可以大大提高冲压力。
本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上作出各种变化。
- 一种多连杆液压压力机
- 液压缸驱动机械多连杆伺服压力机