永磁同步电动机的启动方法和飞机压气机
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及一种压气机的启动方法,尤其是向安装在飞机上的燃料电池供应氧气的方法。
背景技术
燃料电池里不同流体之间的电化学反应可产生电能。向此类燃料电池供应氢气和氧气,并使它们在其中发生反应即可产生电能。一般而言,压气机向燃料电池供应空气即可实现对燃料电池的氧气供应。
如图1所示,压气机1包括永磁同步电动机100,永磁同步电动机100的速度由“脉冲调幅”类型的转换电路200控制。公知地,电动机100包括转子和定子,定子包括能够根据所接收的电流产生磁场的绕组。在该示例中,电动机100包括三个相P1、P2、P3,每个相均由转换电路200控制。相P1、P2、P3接通电动机100的定子绕组。为能控制电动机100以170,000rpm左右的转速高速运转,转换电路200必须控制电动机100的相P1、P2、P3为高频率模式,例如5.5KHz左右。
上述转换电路200包括串联连接的DC-DC转换器210和DC-AC转换器220。DC-DC转换器210与电源2连接并作为输入端,与DC-AC转换器220连接则作为输出端以向DC-AC转换器220提供低于电源2的电压。DC-AC转换器220(也称为逆变器)包括多个开关T1-T6,通过控制这些开关可向电动机100的每个相P1、P2、P3提供所需的电流。以已知的方式,如图1所示,DC-DC转换器210和DC-AC转换器220均由驱动计算器300控制,以便准确地控制电动机100的相P1、P2、P3。
为了便于控制电动机100的转子的旋转,应当根据转子相对于定子的位置来精确地控制定子绕组中的电流。为了确定转子的位置,现有技术已提供若干解决方案。
根据第一种解决方案,专利WO2017/178752A1中公开了将三个霍尔传感器安装在电动机定子处,它们以120°的角度周向间隔分布,以便直接检测出转子的位置。但是,这种传感器的安装昂贵且麻烦。实际上,人们希望在不向电动机增加设备的情况下检测出转子的位置。
根据第二种解决方案,专利FR3028112A1中公开了通过观察电动机的电动势值来确定转子的位置而无需添加传感器。但是,这种解决方案只能在电动机处于稳定状态时实施。此外,这种解决方案无法控制电动机的启动,即过渡阶段。事实上,电动势值的观察仅与电动机的最小旋转速度有关。
实际上,为了实现启动,驱动计算器300包括图2所示的驱动表,该驱动表定义了多个连续的控制阶段S1-S6。每个控制阶段S1-S6确定相P1、P2、P3的电流控制,即开关T1-T6的状态(OFF 0或ON 1状态),以便在确定的时间段D1-D6内施加预设的速度设定值V1-V6。换句话说,驱动表限定预设的加速度,以使电动机100启动,该预设的加速度在图3中由速度设定值Vc的线性斜率表示。然而,这种解决方案具有缺点。
事实上,驱动表是理论上的,没有考虑到电动机100的实际运行状况,特别是,电动机100轴承的紧固扭矩会随着下列因素的变化而发生变化:电动机的转速、使峰值电流变化的转换器电感值、电源2向压气机1输送的电压值、压气机1的运行温度、电动机100的制造公差等。实际上,电动机100的转子速度不遵循线性加速,实际的加速度存在波动,这使速度VR相对于速度设定值Vc的线性斜率产生波动,如图3所示,速度V随时间t变化。此波动导致电动机100反复减速/加速,这增加了电动机的磨损并可能阻止电动机的启动。
为了最大程度地优化电动机100的启动,驱动计算器300可提高DC-DC转换器210的控制设定值,但这会增加对电子元件的磨损。此外,为了优化启动,还可减小加速度,但这会带来电机启动速度的损失。
从专利申请WO2009/016939A1也已知一种用于启动无刷电动机的装置。特别地,它公开了通过改变电角度的相位来调节速度。特别地,它教导了使用静态数据来校正电相位的值和定时。在该专利中,静态校正数据是从与整个系统的电气、机械和环境特征(电动机和充电)有关的理论曲线中获得的。该系统无法实现动态校正。另一方面,专利申请WO2009/016939A1没有教导使用DC-DC转换器。
因此,本发明旨在通过提供一种用于启动飞机永磁同步电动机的新系统和新方法来克服这些缺点,以实现稳健快速启动电动机而无需向电动机添加设备。另一个目的是限制速度振荡。
尽管本发明最初是为解决燃料电池压气机问题而研发的,但本发明适用于永磁同步电动机的任何启动。
发明内容
为此目的,本发明涉及一种永磁同步电动机的启动方法,所述永磁同步电动机包括转子和定子,所述定子包括分别与多个相接通的绕组,所述转换电路将所述多个相与电源接通以便控制所述同步电动机的转子旋转,所述转换电路包括DC-DC转换器,所述DC-DC转换器向DC-AC转换器供电,所述DC-AC转换器包括多个可控开关,用于在多个连续的控制阶段控制所述转子的旋转,所述方法包括:根据驱动表控制所述DC-AC转换器的开关以便确定所述电动机转子的加速度,所述驱动表为每个控制阶段与所述开关的状态对应表。
所述方法的显著之处在于,其包括了:
根据预设加速度ACC确定电角度A;以及
如果所述电角度A大于预设阈值角度A
借助于本发明的方法,控制阶段变化是根据估算的电动机速度动态地确定的,而不是从预设的表格中得出的。这样实现了电动机加速度的优化,以限制电动机的启动时间。
优选地,驱动表包括六个控制阶段,预设阈值角度为60°。因此,阈值角度对应于电动机的六分之一转。
有利地,确定电角度A的步骤包括:对所述预设加速度ACC进行积分以便得出速度V的第一步骤以及对所述速度V进行积分以便得出所述电角度A的第二步骤。
优选地,根据以下公式确定第一简单积分步骤:
V(n)=V(n-1)+T
其中:
-V(n)是n时点的瞬时转子速度,
-V(n-1)是n-1时点的瞬时转子速度,
-T
-ACC是预设加速度,以及
-W是可变参数。
仍然优选地,可变参数W根据以下公式确定:
W=K*V(n-1)
其中K是速度校正常数。
因此,当前速度V(n)根据先前速度V(n-1)获得自动校正。
优选地,所述方法包括检测所述电动机的转子是否减速的自动步骤,如果检测到转子减速,则所述速度校正常数K的值不等于0。优选地,如果检测到转子减速,则所述速度校正常数K的值为2%-8%,优选地为5%左右。这样实现了通过控制电动机来补偿减速并进而限制该减速。速度设定值因此可以自适应地调整。
根据本发明的一方面,当所述DC-AC转换器的电流I
根据本发明的另一方面,当所述DC-AC转换器的电压U
更优选地,检测到转子减速的步骤包括检测出电动机相电流的增加超过控制电流的子步骤。这使得可以容易地检测到减速。
本发明进一步涉及一种用于飞机的压气机,所述压气机包括:永磁同步电动机,其包括转子和定子,所述定子包括分别与多个相接通的绕组,转换电路将所述多个相与电源接通以便控制所述同步电动机的转子旋转,所述转换电路包括DC-DC转换器,所述DC-DC转换器向DC-AC转换器供电,所述DC-AC转换器包括多个可控开关以便在多个连续的控制阶段控制所述转子的旋转;和被配置为实现如前所述的方法的计算器。
优选地,所述压气机是燃料电池空气压气机。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面对实施例描述中所需要使用的附图作简单地介绍。
图1是现有技术的压气机的转换电路和电动机的示意图(此前已描述);
图2是图1转换电路的DC-AC转换器的驱动表示意图;
图3是图1压气机的电动机的速度设定值Vc和速度V
图4是根据本发明的压气机的转换电路和电动机的示意图;
图5是图4转换电路的DC-AC转换器的驱动表示意图;
图6是图4的DC-AC转换器在不同控制阶段的电角度示意图;
图7是由计算器实现的发送阶段改变信号Q的步骤示意图;
图8是通过速度校正发送阶段改变信号Q的步骤示意图;
图9是根据DC-AC转换器的电压测量来确定校正常数的第一示例示意图;
图10是根据DC-AC转换器的电流测量来确定校正常数的第二示例示意图;
图11是根据本发明的电动机启动方法的一种实施例示意图,以及
图12是电动机的速度估值V
应当注意,附图以详细的方式阐述了本发明,以便实施本发明,当然,如果必要,所述附图当然可以用来更好地定义本发明。
具体实施方式
本发明将针对飞机压气机电动机进行阐述。然而,不言而喻,本发明适用于任何永磁同步电动机。
图4示意性地示出了根据本发明的压气机1的一个实施例。在该示例中,压气机1是燃料电池压气机(未示出)。这种压气机1被配置成通过提供含氧空气发生电化学反应来产生电能。但是,本发明适用于任何类型的飞机压气机。
仍然参考图4,压气机1由电源2提供电能。电源2被配置为向压气机1提供电能。压气机包括电动机100、将所述电动机100与电源2连接的转换电路400、以及用于控制转换电路400的计算器500。
电动机100是包括转子(未示出)和定子(未示出)的永磁同步电动机。转子为圆柱形,定子围绕该圆柱形延伸。转子具有围绕圆柱形外围分布的永磁体。定子具有绕转子周向间隔分布的绕组。优选地,定子包括彼此间隔120°分布的三个绕组。转换电路400被配置为向绕组供电,使得它们产生与转子中的永磁体起反应的电磁场,以使其旋转。由于这种永磁同步电动机的操作是已知的,在此不再赘述。如图4所示,电动机100包括三个绕组。电动机100是三相电动机,并且由三相(P1、P2、P3)电流供电,每个相P1、P2、P3分别向一个绕组供电。
转换电路400将电源2供应的电流引导到电动机100的不同绕组中,以便向后者连续供应电流,从而实现转子旋转。为此,转换电路400包括DC-DC转换器410和DC-AC转换器420。
DC-DC转换器410被配置为由电源2供应所谓的“输入”电压。DC-DC转换器410被配置为向DC-AC转换器420输送所谓的“输出”电压,其值不同于输入电压的值。如果输出电压高于输入电压,则DC-DC转换器410是升压型(也称为“升压”转换器),如果输出电压低于输入电压,则DC-DC转换器是降压型(也称为“降压”转换器)。在本实施例中,DC-DC转换器410是降压型转换器。
如图4所示,DC-DC转换器410包括被配置为由输入电压充电的绕组411。当绕组411放电时,其增加了输出电压的值。由于这种DC-DC转换器410的操作是已知的,此处不再赘述。为了控制DC-DC转换器410,计算器500被配置为当绕组411被充电时控制流过绕组411的最大电流值。这实现了对绕组411进行充电以得到预期的输出电压值。
DC-AC转换器420(也称为逆变器)被配置为将直流电转换为交流电,以向电动机100的各个相P1-P3供电。DC-AC转换器420被配置为接收DC-DC转换器410的直流电,直流电由电源2供应。DC-AC转换器420被配置为向电动机100的相P1-P3中的每一个提供电流。
如图4所示,DC-AC转换器420包括多个可控开关T1-T6,以便引导电流通过各绕组。如图5所示,多个开关T1-T6的状态根据它们所处的控制阶段S1-S6来定义。换句话说,对于每个控制阶段S1-S6,开关T1-T6中的每一个的状态是预先设定的。这实现了在控制阶段S1-S6期间确定电动机100的每个相P1-P3的供电。如下所述,由计算器500控制开关T1-T6。
计算器500被配置为一方面控制DC-DC转换器410,另一方面控制DC-AC转换器420。如前所述,计算器500被配置为向DC-DC转换器410发送电流设定值。该电流设定值确定了在对绕组充电时流过绕组411的最大电流,以便确定所需的输出电压。
计算器500还与DC-AC转换器420电连接以实现对其进行控制。特别地,计算器500从图5所示的表中根据控制阶段S1-S6控制开关T1-T6的状态。在该表中,值“0”对应于开关的关闭状态,值“1”对应于打开状态。
根据本发明,计算器500被配置为根据电角度A的值来改变控制阶段S1-S6。因此,控制阶段S1-S6的改变不再通过从表中读取预定时间段来静态地执行,而是结合所述电动机100的特征动态地完成。
图7示出了用于启动电动机100的方法的第一实施例。
在该示例中,计算器500包括:采样器501,其被配置为根据采样常数Ts对存储在存储器中的预设加速度ACC进行采样;以及加法器502,其允许将先前速度V(n-1)相加以确定当前速度V(n)。然后,该预设加速度ACC被积分以确定速度。对加速度ACC的值进行限定,可满足所需的启动时间。
在数学上,可以通过以下公式描述此第一阶段。
V(n)=V(n-1)+T
其中:
-V(n)是n时点下的瞬时转子速度,
-V(n-1)是n-1时点下的瞬时转子速度,
-T
-ACC是预设加速度。
仍然参考图7,计算器500包括饱和器503,其被放置在加法器502的输出端以便限制当前速度V(n)。该当前速度V(n)被传输到存储器504,该存储器将先前速度V(n-1)提供给加法器502。在该第一阶段期间,预设加速度ACC被积分以获得当前速度V(n)。
类似地,计算器500实现了对当前速度V(n)进行积分以获得与转子的角位置相对应的电角度A(n)。
而且,仍然参考图7,当前速度V(n)被传输到采样器505,该采样器被配置为根据预设采样常数来采样当前速度V(n)。计算器500进一步包括加法器506,该加法器使得能够将先前电角度A(n-1)相加以确定当前电角度A(n)。类似于前述,计算器500包括放置在加法器506的输出端的饱和器507,以便限制当前电角度A(n)的值。
当前电角度A(n)被传输到存储器508,该存储器将先前角度A(n-1)提供给加法器506,并且另一方面电角度A(n)被传输到比较器509,比较器509被配置为将当前角度A(n)和阈值角度A
图6具有六个控制阶段S1-S6,阈值角度A
参考图6,以电度表示当前电角度A随时间的变化。一旦超过阈值角度,电角度A就被重置为零,并且开关T1-T6被切换到下一控制阶段S1-S6。这种阶段改变是最优的,因为它是电动机100固有特性的函数。通过本发明,转子的角位置被精确地确定,而不需要额外的电动工具。
根据本发明的优选方面,计算器500包括校正常数K,以便将电动机100的速度波动限制在由控制阶段S1-S6确定的速度设定值附近。为此,参照图8,计算器500包括加法器511,其允许将可变参数W相加,该可变参数W是校正常数K和速度V(n-1)的函数。
经过校正,根据以下公式定义当前速度V(n):
V(n)=V(n-1)+T
其中:
-W是根据以下公式确定的可变参数:
W=K*V(n-1)
其中,K是速度校正常数。
接下来阐述校正常数K的几种计算模式。目的是在电动机100要返回到由控制阶段S1-S6确定的速度设定值时检测电动机100的速度是否出现减速。通过使用校正常数K,可以提高速度设定值,从而可以限制减速。
根据第一实施例,检测到DC-AC转换器420中的电压U
如果U
优选地,在分析几个连续的样本之后验证速度校正常数K的值,以确认电压U
根据第二实施例,如图4所示,检测到DC-AC转换器420中的电流I
参考图10,类似于图9,计算器500被配置为对DC-AC转换器420的当前I
因此,计算器500被配置为校正速度设定值,以便优化电动机100的启动时间。以有利的方式,通过校正,有利地减小了转子速度的波动。
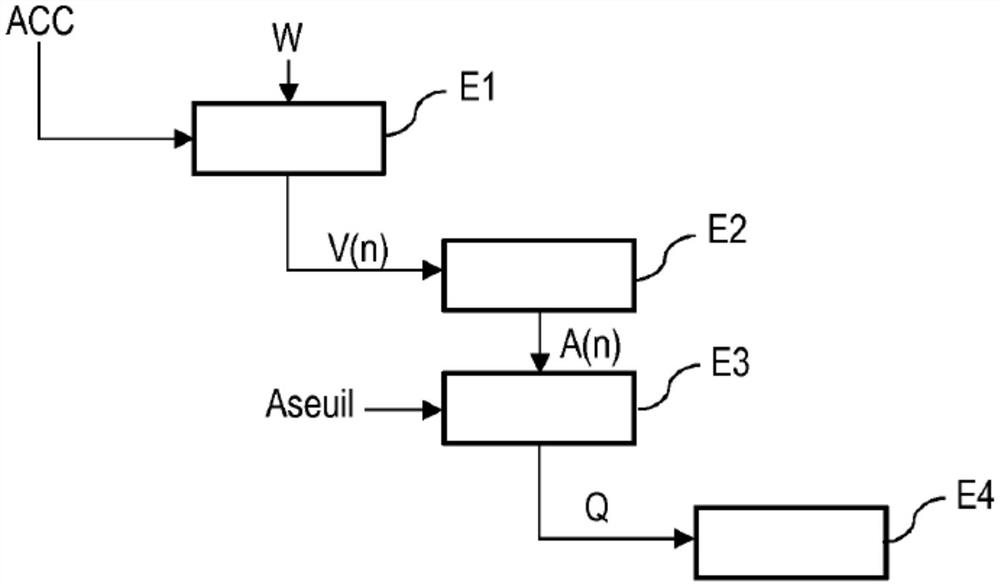
以下是参照图11描述根据本发明的用于启动同步电动机100的方法的实施例。
为了使电动机100旋转,计算器500根据图5所示的驱动表来控制开关T1-T6的状态,该驱动表定义了连续的控制阶段S1-S6。电动机100的转子加速度ACC是预设的。
为了从一个控制阶段S1-S6切换到下一控制阶段S1-S6,计算器500在步骤E1中执行预设加速度ACC的第一简单积分,以便从以下公式得出当前速度V(n):
V(n)=V(n-1)+T
优选地,在该步骤期间,计算器500通过利用先前提出的方法之一从电动机100的减速检测中确定可变参数W的值。
然后,计算器500在步骤E2中对由此得出的速度V(n)进行第二简单积分,以便从中得出当前电角度A(n)。计算器500因此产生图6所示的电角度信号A。当电角度信号A达到预设阈值角度A
以这种方式,计算器500控制各个控制阶段S1-S6的连续变化,以实现电动机100加速到其启动速度。
借助于根据本发明的方法,控制阶段S1-S6的变化是从转子速度而不是从预设表中确定的。这使得可以使加速度适应电动机10的可能减速,从而限制电动机的启动时间段。如图12所示,估计速度VE的增加是迅速的。此外,借助于速度设定值Vc的自动校正,可显著减轻振荡。
- 永磁同步电动机的启动方法和飞机压气机
- 一种异步启动永磁同步电动机的启动结构设置及方法