电动机
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及一种电动机,通过使电动机的定子旋转并将该定子的旋转力用于转子的旋转,能实现高输出。
背景技术
近年来,从削减二氧化碳的排放量的观点出发,同时使用内燃机和电动机的混合动力车或电动汽车显著普及。这种混合动力车或电动汽车具有利用电力使车轮旋转的大输出的电动机(马达)作为驱动源。在此,本申请的发明人已经发明了既能抑制电弧火花的产生又能供应大电流的下述[专利文献1]、[专利文献2]所述的电动机。
专利文献1:特开第4438022号公报
专利文献2:特开第4460629号公报
发明内容
但是,对于这些电动机,要求进一步的高效率、高输出,期望有进一步的改善。本发明是鉴于上述情况而完成的,目的在于提供一种电动机,通过使电动机的定子旋转并将该定子的旋转力用于转子的旋转,能实现高输出。
本发明
(1)通过提供如下电动机以解决上述问题,一种电动机80a、80b,具有:
输出轴10,其向被驱动体M传递旋转力;
轴承部12,其支承上述输出轴10且使上述输出轴10能旋转;
转子30,其固定于上述输出轴10;
定子40,其位于上述转子30的外侧;以及
多个线圈42,其设置于上述定子40,
通过向上述线圈42流动驱动电流,从而使上述转子30旋转,
上述电动机80a、80b的特征在于,
还具有定子旋转机构46,上述定子旋转机构46保持上述定子40且使上述定子40能向与上述转子30相同的方向旋转,
通过在使上述定子40旋转的状态下使上述驱动电流流动,从而,由上述驱动电流带来的旋转力与上述定子40的旋转力加起来使上述转子旋转。
(2)通过提供如下电动机以解决上述问题,根据上述(1)所述的电动机80a、80b,其特征在于,
在定子40的旋转比转子30的限制转矩T
(3)通过提供如下电动机以解决上述问题,根据上述(1)所述的电动机80a、80b,其特征在于,
具有防止转子30和定子40的逆向旋转的防逆转单元16、46b,上述防逆转单元16、46b具有:棘轮齿轮50,其是与轴承部12固定的;以及爪部52,其固定于上述转子30侧和上述定子40侧,与上述棘轮齿轮50啮合,
当成为规定的旋转速度以上时,上述爪部52从上述棘轮齿轮50脱离而变为不接触。
(4)通过提供如下电动机以解决上述问题,根据上述(1)至(3)中的任意一项所述的电动机80b,其特征在于,
向线圈42流动交流的驱动电流,并且
还具有:
转子铁芯36,其设置于转子30;
定子频率取得单元,其根据定子40的转速取得定子频率fc;以及
控制部,其控制上述驱动电流的频率fa,
上述控制部在将定子频率fc考虑在内的基础上对频率fa进行控制,以获得规定的转差频率(fsa、-fsa)。
(5)通过提供如下电动机以解决上述问题,根据上述(1)至(3)中的任意一项所述的电动机80a,其特征在于,
还具有:
多个励磁磁铁32,其设置于转子30,与线圈42相对;
位置信息取得单元,其取得上述线圈42与上述励磁磁铁32的相对位置;以及
控制部,其对给予上述线圈42的驱动电流的流动方向进行控制,
上述励磁磁铁32等间隔设置,并且以使相邻的磁极为相反的方式设置,
上述控制部基于来自上述位置信息取得单元的上述线圈42与励磁磁铁32的相对位置,分别控制上述线圈42的驱动电流的流动方向。
本发明的电动机在转子减速时等通过转子的旋转力使定子旋转并将转子的旋转力在保持为动能的状态下进行累积,并且在转子加速时等将该定子的旋转力用于转子的旋转。从而,能够与本来的由驱动电流带来的旋转力相结合而得到高输出。另外,由于是将旋转力在保持为动能的状态下在转子、定子间传递,因此,能量损失少,能够高效地利用转子、定子的旋转力。而且,本发明的电动机在定子的旋转速度比转子的旋转速度快的动作区域中能够使施加到线圈的反电动势或感抗降低,能够抑制该动作区域中的损失。再者,在定子的旋转力存在多余的转矩的情况下,线圈以相当于该多余的转矩的部分进行发电,能减少驱动电流的输出。从而,能够实现进一步的高效率化、节能化。
附图说明
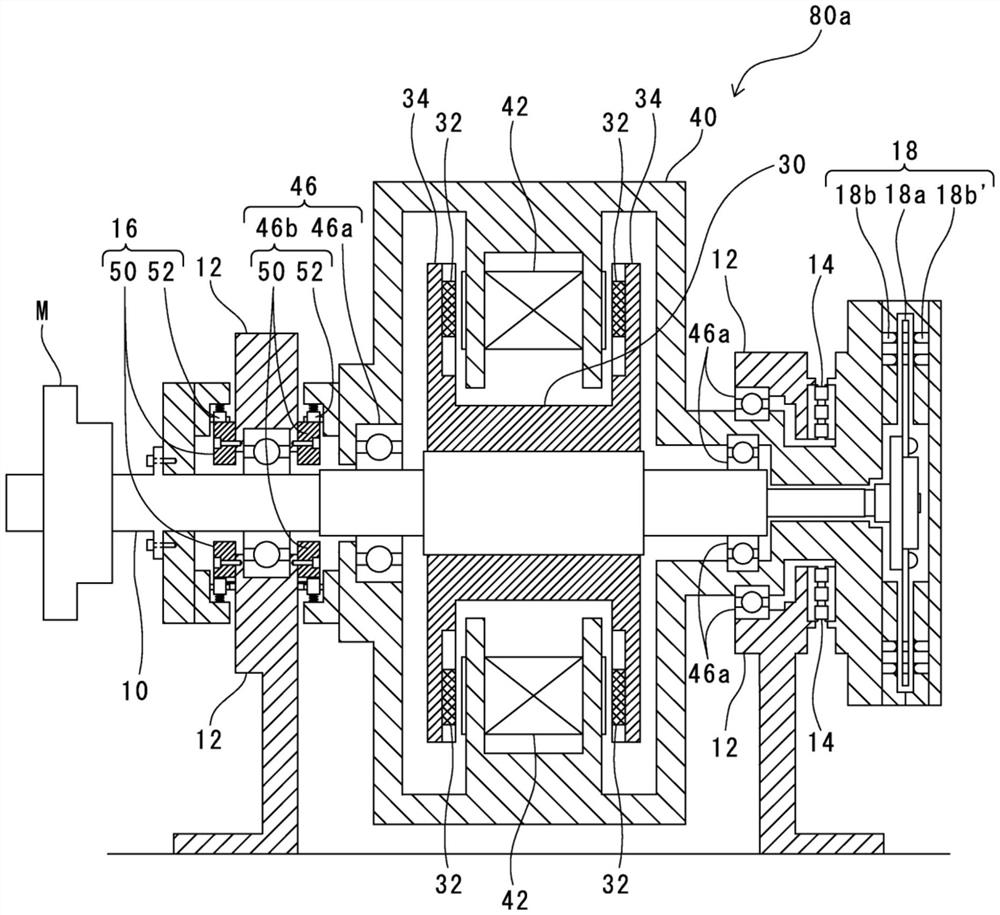
图1是本发明的第1方式的电动机的示意性截面图。
图2是本发明的第2方式的电动机的示意性截面图。
图3是示出本发明优选的防逆转单元的图。
图4是示意性地示出本发明的电动机的N-T线图和旋转速度的变化的图。
图5是说明第1方式的电动机的控制的图。
图6是示出转差频率与电磁转矩的关系的坐标图。
具体实施方式
基于附图来说明本发明的电动机的实施方式。在此,图1是本发明的第1方式的电动机80a的示意性截面图。另外,图2是本发明的第2方式的电动机80b的示意性截面图。
首先,说明本发明的电动机80a、80b中共同的构成。图1、图2所示的本发明的电动机80a、80b具有:输出轴10,其向被驱动体M传递旋转力;转子30,其固定于该输出轴10;定子40,其位于该转子30的外侧;以及定子旋转机构46,其保持该定子40且使该定子40能向与转子30相同的方向旋转。此外,在将本发明的电动机80a、80b应用于电动汽车等车辆的情况下,被驱动体M是车轮或使车轮旋转的减速机构等。
并且,转子30(输出轴10)由轴承部12支承并能旋转,且在转子30(输出轴10)与轴承部12之间设置有防逆转单元16,限制转子30向相反方向的旋转,并且例如在被驱动体M停止时等将转子30与轴承部12固定,防止转子30旋转。另外,保持定子40的定子旋转机构46主要包括:公知的轴承等轴承部46a,其支承定子40且使定子40能相对于转子30进行旋转;以及防逆转单元46b,其限制定子40向与转子30的旋转方向相反的方向的旋转。另外,在定子40与轴承部12之间设置有集电环或导电刷等公知的旋转导电单元14,后述的线圈42等经由该旋转体导电单元14从电源部接受电力供应。
作为防逆转单元16、46b,可以使用单向离合器或电磁离合器等公知的构件,但特别优选使用图3所示那样的机构。在此,图3的(a)是从横向观看本发明优选的防逆转单元16、46b的示意图,图3的(b)是从轴向观看防逆转单元16、46b的低速旋转时的状态的示意图,图3的(c)是从轴向观看防逆转单元16、46b的高速旋转时的状态的示意图。
如图3所示,针对转子30的优选的防逆转单元16具有:棘轮齿轮50,其是与轴承部12固定的;爪部52,其通过固定于输出轴10而与转子30侧固定;旋转轴54,其支承该爪部52且使该爪部52能转动;以及弹簧等公知的弹性构件56,其对爪部52向棘轮齿轮50侧施力。另外,针对定子40的优选的防逆转单元46b具有:棘轮齿轮50,其是与轴承部12固定的;爪部52,其是与定子40侧固定的;旋转轴54,其支承该爪部52且使该爪部52能转动;以及公知的弹性构件56,其对爪部52向棘轮齿轮50侧施力。此外,在图3中示出了爪部52为6个的例子,但爪部52的数量没有特别限定。
并且,在施加了使得转子30、定子40相对于轴承部12(棘轮齿轮50)向正向(图3的(b)、(c)中的顺时针旋转的方向)旋转这样的力的情况下,防逆转单元16、46b的爪部52在棘轮齿轮50上滑动并旋转。从而,防逆转单元16、46b允许转子30、定子40的正向的旋转。另外,在施加了使得转子30、定子40相对于轴承部12向相反方向(图3的(b)、(c)中的逆时针旋转的方向)旋转这样的力的情况下,爪部52与棘轮齿轮50啮合并阻止转子30、定子40的旋转,从而,防逆转单元16、46b防止转子30、定子40的逆向旋转。并且特别是,本发明优选的防逆转单元16、46b将弹性构件56的弹力最佳化,使得当转子30、定子40成为规定的旋转速度以上的高速旋转时,爪部52因离心力而向外侧转动。根据该构成,在转子30、定子40的高速旋转时,如图3的(c)所示,爪部52转动并从棘轮齿轮50脱离,变为彼此不接触。从而,摩擦阻力或振动降低,能够实现损失的减轻。另外,防逆转单元16、46b的磨损或负荷减轻,能够实现防逆转单元16、46b的长寿命化。
接下来,说明本发明的第1方式的电动机80a的构成。图1所示的第1方式的电动机80a在定子40侧具有作为电枢发挥功能的多个线圈42,在转子30侧具有多个作为励磁部的励磁磁铁32。此外,在本发明中,如后所述将定子40的旋转力Ki转换为转子30的旋转。并且,此时的定子40的旋转力Ki会与定子40的惯性矩相应地变大。因此,为了得到更大的旋转力Ki,增加定子40的重量、增大惯性矩是有效的。因此,在第1方式的电动机80a中,优选将有重量的线圈42设置在定子40侧,以实现惯性矩的提高。
并且,定子40的线圈42在绕组芯内具备磁心,在周向上隔开一定的间隔配置有多个,例如36个。另外,在电动机80a的转子30上以夹着定子40侧的线圈42的方式固定有2个转子圆板34,多个励磁磁铁32以与定子40侧的线圈42的磁心相对的方式等间隔地固定在该转子圆板34的内侧。此外,该励磁磁铁32是用于形成相对于线圈42的磁场磁通来使转子30旋转的永久磁铁,以使沿着周向相邻的磁极为相反的方式配设,即,以使N极与S极交替出现的方式配设。另外,作为励磁磁铁32,既可以使用金属磁铁,也可以使用烧结磁铁,但其中特别优选使用具有大磁力的钕磁铁等稀土类磁铁。此外,在线圈42为36个的情况下,励磁磁铁32例如以夹着线圈42的方式设置有6对。
另外,在电动机80a中设置有:位置信息取得单元18,其取得励磁磁铁32相对于线圈42的相对位置;以及未图示的控制部,输出轴10(转子30)的转速输入其中,并且其基于来自位置信息取得单元18的位置信息对给予线圈42的驱动电流的流动方向进行控制。此外,位置信息取得单元18没有特别限定,可以使用公知的位置传感器或旋转变压器式角度测定器等公知的磁式位置检测器、公知的光学式位置检测器等任意检测器。
另外,位置信息取得单元18除了设为直接取得相对位置之外,也可以设为分别设置取得线圈42的绝对位置的线圈位置信息取得单元和取得励磁磁铁32的绝对位置的磁铁位置信息取得单元,将各线圈位置信息取得单元的输出分别连接到控制部(CPU)的例如port-1,另外,将各磁铁位置信息取得单元的输出分别连接到例如port-2,控制部从port-1的输入信号取得线圈42的绝对位置,并且从port-2的输入信号取得励磁磁铁32的绝对位置,根据这些线圈42的绝对位置和励磁磁铁32的绝对位置来算出两者的相对位置。
此外,在图1中,作为位置信息取得单元18,示出了使用光学式的位置检测单元的例子,该光学式的位置检测单元具有:狭缝板18a,其与转子30一起旋转,并在规定的位置形成有开口;以及发光元件18b、受光元件18b’,其与定子40固定,并隔着狭缝板18a的开口设置。并且,在该位置信息取得单元18中,当转子30、定子40进行旋转动作而狭缝板18a的开口位于发光元件18b、受光元件18b’之间时,发光元件18b的光通过狭缝板18a的开口到达受光元件18b’,受光元件18b’将规定的受光信号输出到后述的控制部等。另外,当狭缝板18a的开口从发光元件18b、受光元件18b’之间偏离时,发光元件18b的光被狭缝板18a遮挡而不会到达受光元件18b’,受光信号不被输出。并且,通过将该狭缝板18a的开口的位置最佳化,控制部能够基于所输入的受光信号取得线圈42与励磁磁铁32的相对位置。并且,控制部基于转子30(励磁磁铁32)相对于定子40(线圈42)的相对位置、以及输出轴10(转子30)的转速,控制向各线圈42流动的驱动电流的电流值和流动方向以进行上位的控制装置等所要求的旋转动作。
接下来,说明本发明的第2方式的电动机80b的构成。首先,电动机80b的转子30具有例如将电磁钢板贴合为圆筒状而成的转子铁芯36。并且,具备磁心的多个线圈42以使磁心朝向转子铁芯36侧的方式设置在与转子铁芯36相对的定子40的内侧。并且,例如在U相、V相、W相的3相交流的电动机80b的情况下,按顺序配置有与U相、V相、W相分别对应的线圈42,U相、V相、W相的交流电流按顺序向各自的线圈42流动,从而,由线圈42形成的磁场进行旋转。并且,由于该旋转磁场,而向转子铁芯36流动涡电流,洛伦兹力起作用,转子30旋转。
另外,第2方式的电动机80b具有:定子频率取得单元,其以计算或从数据表格等当中选择的方式取得与定子40的转速对应的定子频率fc;以及控制部,其控制向各线圈42流动的驱动电流的频率fa。此外,定子频率fc是指,使定子40(在停止的状态下)产生与定子40的旋转为相同转速的旋转磁场所需的驱动电流的频率。并且,控制部在将该定子频率fc考虑在内的基础上对频率fa进行控制,使得相对于转子30的旋转磁场成为规定的转差频率fs。
接下来,使用图4来说明本发明的电动机80a、80b的特征性动作。在此,图4的(a)是将横轴设为输出轴10的转速N、将纵轴设为输出轴10的转矩T的示意性N-T线图,图4的(b)是为了说明转子30、定子40的旋转速度的变化而以直线示意性地示出它们的变化的图。此外,在图4的(a)中示出了用转矩T
首先,在第1方式的电动机80a的电源断开的状态下,电动机80a的转子30、定子40都处于停止状态(图4的(b)中的点0)。接下来,当启动电动机80a时,控制部在由防逆转单元16阻止了转子30的逆向旋转的状态下对线圈42施加逆向旋转方向的电流。由此,力在逆向旋转方向上作用于转子30,但如上所述,转子30的逆向旋转是被阻止的,因此,在该转子30产生的力变为反作用力而作用于定子40,从而定子40向正向旋转。然后,在定子40成为规定的旋转速度的时间点(图4的(b)的虚线中的点A),当进行例如踩踏加速器等的对输出轴10的输出请求时,控制部解除转子30的固定,并且使得会使转子30向正向旋转那样的驱动电流向线圈42流动。从而,转子30与定子40磁耦合,转子30因定子40的物理旋转力以及驱动电流而向相同的方向(正向)开始旋转。
在此,说明电动机80a的控制部对驱动电流的流动方向的控制的一例。此外,在此,如图5所示,使用具有9个线圈42(图5中的线圈CL1~CL9)和6个励磁磁铁32(图5中的励磁磁铁PM1~PM6)的电动机80a进行说明。在这种情况下,励磁磁铁PM1~PM6以彼此成60°的角度等间隔设置,并且以使相邻的磁极为相反的方式设置。另外,与图5所示的面相反的一侧的面的极性全部相反。此外,在图5中,为了便于说明,图示了未旋转的线圈CL1~CL9(定子40),但实际上定子40也向与转子30相同的正向旋转。
并且,上述的电动机80a的控制部根据从位置信息取得单元取得的线圈42与励磁磁铁32的相对位置的信息,在例如变为图5的(a)所示的状态,即(线圈42侧的)磁极为N极的励磁磁铁PM1、PM3、PM5与线圈CL1、CL4、CL7分别一致的状态时,控制部切换驱动电流的流动方向以使线圈CL1、CL4、CL7的(励磁磁铁PM1、PM3、PM5侧的)磁极从S极变为N极。从而,在励磁磁铁PM1、PM3、PM5与线圈CL1、CL4、CL7之间产生斥力。另外,此时,位于相对磁极为S极的励磁磁铁PM2、PM4、PM6的正向(图5中的顺时针旋转的方向)的线圈CL3、CL6、CL9的磁极为N极,位于相反方向(图5中的逆时针旋转的方向)的线圈CL2、CL5、CL8的磁极为S极,因此,励磁磁铁PM2、PM4、PM6与不同极的线圈CL3、CL6、CL9相吸引,转子30相对于定子40向正向旋转。然后,如图5的(b)所示,当S极的励磁磁铁PM2、PM4、PM6旋转到与线圈CL3、CL6、CL9一致的位置时,控制部经由位置信息取得单元探知到这一情况,切换驱动电流的流动方向以使线圈CL3、CL6、CL9的磁极从N极变为S极。从而,在励磁磁铁PM2、PM4、PM6与线圈CL3、CL6、CL9之间产生斥力。另外,此时,位于N极的励磁磁铁PM1、PM3、PM5的正向的线圈CL2、CL5、CL8的磁极为S极,位于相反方向的线圈CL1、CL4、CL7的磁极为N极,因此,励磁磁铁PM1、PM3、PM5与不同极的线圈CL2、CL5、CL8相吸引,转子30相对于定子40向正向旋转。并且,如图5的(c)~(f)所示,控制部根据线圈42与励磁磁铁32的相对位置,对流过各线圈42的电流的流动方向进行控制来改变线圈42的磁极,从而使转子30向正向旋转。此外,控制部基于输出轴10所要求的旋转速度和转矩而适当地设定驱动电流的电流值。
从而,转子30以与图4的(a)的驱动电流的供应电力Kw相应的转矩Tw进行旋转动作。另外,如上所述,转子30也因定子40的旋转力而旋转,因此,如图4的(a)的点A所示,转子30以由驱动电流的供应电力Kw产生的转矩Tw与由定子40的旋转力Ki产生的转矩相加而得到的转矩T
另外,在第2方式的电动机80b中,若在转子30、定子40均处于停止状态时启动电动机80b,则控制部在阻止了转子30的逆向旋转的状态下对线圈42分别施加逆向旋转方向的U相、V相、W相的交流电流。由此,力在逆向旋转方向上作用于转子30,但如上所述,转子30的逆向旋转是被阻止的,因此,在该转子30产生的力变为反作用力而作用于定子40,从而定子40向正向旋转。此时,定子频率取得单元取得与该定子40的转速相应的定子频率fc并将其输出到控制部。然后,在定子40成为规定的旋转速度的时间点(图4的(b)的虚线中的点A),当进行例如踩踏加速器等的对输出轴10的输出请求时,控制部解除转子30的固定,并且使得会使转子30向正向旋转那样的U相、V相、W相的交流的驱动电流向对应的线圈42流动。这时,控制部在将从定子频率取得单元取得的定子频率fc考虑在内的基础上对U相、V相、W相的各驱动电流的频率fa进行控制,以获得规定的转差频率fs。此外,转差频率fs是指根据转子30的转速得到的转子频率fn与施加于转子30的旋转磁场频率fm之差,
fs=fm-fn。
另外,电动机80b中的旋转磁场频率fm是因定子40的旋转而产生的定子频率fc与驱动电流的频率fa相加而得到的,
fm=fc+fa。
在此,在图6中示出转差频率fs与电磁转矩Tm的关系。如图6所示,在转差频率fs为特定的频率fsa、-fsa时,电磁转矩Tm的绝对值取正负的峰值,然后由于功率因数的下降而减小。并且,在第2方式的电动机80b中,在转子30的加速时,在将定子频率fc考虑在内的基础上对频率fa进行控制,使得转差频率fs变为频率fsa。另外,在转子30的减速时,在将定子频率fc考虑在内的基础上对频率fa进行控制,使得转差频率fs变为频率-fsa。此外,转差频率fsa、-fsa中的转差率s(s=fsa/fm)的取值通常为0.3±0.05的程度。
在此,例如在使转子30与定子40在定子40以旋转速度Nc’(定子频率fc)向正向高速旋转的状态下进行磁耦合的情况下,控制部施加使旋转磁场成为与定子40的旋转相反的旋转的频率fa=fn+fsa-fc的驱动电流。从而,定子40一边以旋转速度Nc’旋转,一边相对于转子30生成转差频率为fsa的旋转磁场。从而,转子30通过电磁转矩Tm为最大的旋转磁场进行旋转。另外,与此同时,控制部使得不阻碍电动机80b的动作的程度的直流电流叠加到驱动电流而流动。从而,转子30与定子40磁耦合,转子30也由于定子40的物理旋转力而向相同的方向(正向)旋转。即,与前述的电动机80a同样地,转子30以由驱动电流的供应电力Kw产生的转矩Tw(=电磁转矩Tm)与由定子40的旋转力Ki产生的转矩相加而得到的转矩T
这时,在定子40的旋转力存在多余的转矩的情况下,线圈42以相当于该多余的转矩的部分进行发电。此时,与第1方式的电动机80a同样地,从(速度加快的)转子30侧来观看,(速度变慢)的定子40的相对旋转方向变为相反方向,磁场方向相同,因此,根据弗莱明的右手、左手定则,发电电流与驱动电流的流动方向为相同方向,另外,依照定子40的转速,发电电流的频率与驱动电流同等,因此,该发电电流被合成到驱动电流中,而被补充为驱动电流的一部分。从而,能减少驱动电流的输出,能够降低来自电源的供应电力。
这样,第1方式和第2方式的电动机80a、80b的转子30以由定子40的旋转力和驱动电流带来的转矩T
在此,在定子不旋转的现有电动机中,随着转子的旋转而立即产生反电动势Ke,该反电动势Ke如下式A所示使转子的输出Nc·T减少。
Nc·T=Kw-Ke…式A
Nc:输出轴(转子)转速
T:输出轴转矩
Kw:供应电力
Ke:反电动势
另外,该反电动势Ke由下式B表示。
Ke=B·L·r·ω…式B
B:磁场的强度
L:线圈的长度
r:旋转半径
ω:(相对于定子的)转子的角速度
如该式B所示,反电动势Ke随着转子相对于定子的角速度ω的增加而增大,从而,式A所示的输出Nc·T减少,损失增大。因此,在定子被固定的现有电动机中,为了维持规定的输出Nc·T,需要大的供应电力Kw来弥补因反电动势Ke而导致的损失量。
但是,在本发明的第1方式的电动机80a中,在定子40的旋转速度Nm比转子30的旋转速度Nc快的Nm>Nc的区域(图4的(b)中的点A-点B间的区域)中,转子30相对于定子40的角速度ω为负,反电动势Ke使填补驱动电流的电流流动。从而,能够进一步降低来自电源的供应电力。
并且,在本发明的第1方式的电动机80a中,在定子40的旋转速度Nm变为与转子30的旋转速度Nc相等的Nm=Nc(图4的(b)中的点B)以前不产生反电动势Ke,能够将供应电力Kw全部用于转子30的输出Nc·T。并且,在转子30的旋转速度Nc变得比定子40的旋转速度Nm快的Nc>Nm的时间点产生反电动势Ke,在此,方才首次产生输出Nc·T的损失。即,在定子不旋转的现有电动机中,是从转子的旋转刚刚开始之后就产生因反电动势Ke而导致的损失,而在本发明的电动机80a中,在转子30的旋转速度Nc超过定子40的旋转速度Nm以前不会产生因反电动势Ke而导致的损失。因此,在转子30的旋转初期的需要高转矩的区域,不增加供应电力Kw就能够维持输出Nc·T。
并且,当转子30的旋转速度Nc进一步增大时,定子40的旋转速度Nm减小,定子40最终停止(图4的(b)中的点C)。在到该定子40停止为止的Nc>Nm>0的区域(图4的(b)中的点B-点C间的区域)中,虽然会产生因反电动势Ke而导致的损失,但定子40依然处于旋转状态,因此,反电动势Ke变为与定子40的旋转速度Nm相应的较小的值,与定子不旋转的现有电动机相比,产生的反电动势Ke较小,损失较少。并且,第1方式的电动机80a在定子40停止的图4的(b)中的点C以后表现出与现有电动机同等的举动。
这样,本发明的第1方式的电动机80a由于将定子40的旋转力Ki用于转子30的旋转,因此,能够以比现有的仅由供应电力Kw产生的转矩Tw高的转矩T
另外,关于第2方式的电动机80b,在现有的3相交流电动机的情况下,在线圈中产生与驱动电流(电压)反向的自感应电动势,此时的感抗X
X
Lc:线圈的电感
f:施加电压频率
在此,f=ω/(2π)
ω:(相对于定子的)转子的角速度
并且,随着该感抗X
但是,在本发明的第2方式的电动机80b中,在转子30的旋转开始时,以定子40的旋转力Ki为主而使转子30旋转,并且之后,到定子40停止为止,在将定子频率fc考虑在内的基础上对施加频率f(频率fa)进行控制,因此,与定子不旋转的现有电动机相比,ω较小,能降低施加频率f(频率fa)。从而,能将感抗X
接下来,在电动机80a、80b的转子30旋转且定子40停止的状态下,当进行例如踩踏制动器等的使输出轴10(转子30)的旋转减速的请求时,控制部例如使得会使转子30的旋转减速那样的驱动电流向线圈42流动。
从而,在转子30的旋转速度减小的同时,在转子30与定子40之间产生反作用力,该反作用力使定子40向正向旋转。从而,转子30的旋转力被转换为定子40的旋转并累积。然后,当再次进行踩踏加速器等的使输出轴10向正向旋转的输出请求时,与先前的动作同样地,定子40的旋转力Ki以使转子30旋转的方式发挥作用。
在此,在具备定子不旋转的现有电动机的电动汽车等当中,用该制动时等的转矩进行发电并将其作为电力累积于电池等。然后,在重新启动时(进行使输出轴10向正向旋转的输出请求时)用作供应电力。但是,从该动能向电能的转换效率低,能量损失大。相对于此,在本发明的电动机80a、80b中,是将转子30的旋转力在保持为动能的状态下作为定子40的旋转力进行累积,并在重新启动时将定子40的旋转力在保持为动能的状态下用作转子30的旋转力。因此,能量损失低,能够最大限度地有效利用转子30、定子40的动能。
另外,特别是在第2方式的电动机80b中,在转子30的减速时,也在将(转速逐渐提高的)定子40的定子频率fc考虑在内的基础上对给予转子30的驱动电流的频率fa进行控制,以获得在相反方向上产生最大的电磁转矩的转差频率-fsa。例如,在使转子30与定子40在转子30以转速Nn’(转子频率fn)向正向高速旋转的状态下进行磁耦合的情况下,控制部对转子30施加会生成转差频率为-fsa那样的(与转子30的旋转方向为相反方向的)旋转磁场的、频率为fa的驱动电流。另外,与此同时,控制部使得不阻碍电动机80b的动作的程度的直流电流叠加到驱动电流而流动。从而,定子40由于电磁转矩Tm在相反方向上为最大的转差频率为-fsa的旋转磁场而与转子30磁耦合,旋转速度逐渐加快。另外,随着该定子40的旋转速度的加快,转子30的旋转速度逐渐减慢。并且,控制部使频率fa与转子30、定子40的旋转速度的变化相应地改变,维持转差频率-fsa。从而,能够将转子30的旋转力高效率地转换为定子40的旋转。
如上所述,在本发明的电动机80a、80b中,使定子40旋转,并在转子30的旋转时将定子40的旋转力Ki用于转子30的旋转。从而,能够得到比现有电动机高的输出Nc·T。另外,在定子40旋转动作区域中,能够使施加到线圈42的反电动势Ke或感抗X
另外,在本发明的电动机80a、80b中,在制动时等将转子30的旋转力在保持为动能的状态下作为定子40的旋转力进行累积,并在重新启动时等将该定子40的旋转力在保持为动能的状态下用于转子30的旋转。因此,能量损失少,能够最大限度地有效利用转子30、定子40的动能。
而且,在本发明的电动机80a、80b中,在定子40的旋转力存在多余的转矩的情况下,线圈42以相当于该多余的转矩的部分进行发电,并将该发电电力补充为驱动电流的一部分。从而,能减少驱动电流的输出,能够实现进一步的高效率化、节能化。而且,在第2方式的电动机80b中,由于是使转子30以最佳的转差频率fsa、-fas旋转,因而能抑制不必要的发热,也能够实现冷却装置等的负荷的减轻。
此外,本例所示的电动机80a、80b、转子30、定子40、定子旋转机构46、防逆转单元16、46b等各构成是一个例子,各部的形状、尺寸、机构、外观设计、线圈42或励磁磁铁32的个数等能在不脱离本发明的主旨的范围内进行变更来实施。
10 输出轴
12 轴承部
30 转子
32 励磁磁铁
36 转子铁芯
16、46b 防逆转单元
40 定子
42 线圈
46 定子旋转机构
50 棘轮齿轮
52 爪部
80a、80b 电动机
M 被驱动体。
- 电动机控制装置、具备该电动机控制装置的电动机单元、具备电动机单元的汽车以及电动机控制方法
- 电动机的转子、具有其的电动机、具有该电动机的增压器及电动机的组装方法