无线充电系统及无线充电对位方法
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及一种无线充电系统及无线充电对位方法,属于无线充电技术领域。
背景技术
随着智能科技的迅速发展,巡检机器人开始大规模的应用于常规的电力巡检、工厂巡检、养殖巡检和小区巡检等场景中,让人从高危、恶劣的环境和繁琐的巡检工作中解放出来。然而巡检机器人需要有持续的电量供应,方能保证不间断的轮班值守,确保24小时巡检监控不间断。因此,如何解决现有充电问题又成为了当前机器人企业必须思考的一个问题。
现有机器人的自动充电方式大部分都是接触式充电,在长期使用过程中,存在以下问题:1、充电触头易磨损,磨蚀老化,寿命短,需要定期更换;2、充电触头为暴露部件,防护等级较低,容易出现触电危险,无法在室外、低温凝露、潮湿、易燃易爆等环境下正常工作;3、定位误差的限制,导航精度较低,不易对准充电触点;4、充电触头出现污物,将会导致接触不良或者电连接失败。
为解决机器人接触式充电的现有问题,急需要发展一种适用于机器人的非接触式充电技术。目前无线充电技术已经开始大规模应用于手机、厨房电器等电子产品上,而机器人尚未开始大规模应用该技术。
由于无线充电发射盘和接收盘在面积为1:1时充电效率最高,现有的无线充电收发盘在X轴、Y轴和Z轴上的偏移均要求在±2cm以内才能开始充电,并且X轴、Y轴和Z轴偏移为0时充电效率最高,而目前巡检机器人的激光定位精度均在±5cm以上,无法满足无线充电定位要求,所以需要设计一种无线充电对位方法来满足无线充电对位要求的精度,保证机器人无线充电的稳定性和充电效率。
现有的无线充电系统,一般将无线充电接收盘安装到机器人底部,将发射模块安装到地面,同时还有一些机械导向装置,用于实现无线充电发射盘和接收盘的对位。然而现有的机械对位装置往往存在着结构复杂、定位精度较低、定位效率不高、易磨损等问题,同时将发射盘安装到地上,金属物质容易在表面堆积,充电时金属产生涡流效应发热并影响充电效率。
发明内容
发明目的:为了克服现有技术中存在的不足,本发明提供的无线充电系统及无线充电对位方法,通过限位开关及高精密运动机构实现无线充电收发盘的精确定位,有效满足无线充电的定位要求,具有结构简单、重复定位精度高、稳定安全高效等优点。
技术方案:为实现上述目的,本发明提供的无线充电系统,包括充电主体、无线充电桩,所述充电主体上设有限位开关、无线充电接收装置、接收端控制装置,所述无线充电桩上设有高精密运动机构、无线充电发射装置、发射端控制装置;
当充电主体向无线充电桩靠近时,通过限位开关实现充电主体与无线充电桩的距离控制,而后通过高精密运动机构实现无线充电发射装置与无线充电接收装置的定位对接。
进一步的,所述高精密运动机构包括丝杆模组、模组支架,所述丝杆模组上设有模组滑块,用于实现无线充电发射装置的连接固定,所述丝杆模组的一侧设有步进电机,用于实现丝杆模组的驱动控制。
进一步的,所述模组支架上还设有定位开关,所述无线充电发射装置上设有定位支架,通过定位支架与定位开关的配合实现无线充电发射装置的运动定位。
进一步的,所述无线充电接收装置与无线充电发射装置上设有定位组件,用于实现无线充电接收装置与无线充电发射装置的定位确认。
进一步的,所述定位组件包括分别设置于无线充电接收装置与无线充电发射装置上的激光定位发射器和激光定位接收器。
进一步的,所述无线充电桩上设有高度调节机构,用于实现无线充电发射装置的高度调节,所述高度调节机构可采用电动伸缩支架或手动调节支架。
本发明还提供一种无线充电对位方法,包括以下步骤:
T1当充电主体低电量时,开始搜寻附近的无线充电桩;
T2充电主体通过导航快速移动到无线充电桩对应的充电区域内;
T3充电主体低速靠近无线充电桩,并利用限位开关停在充电桩前方设定距离处;
T4接收端控制装置发送指令给发射端控制装置,发射端控制装置通过高精密运动机构实现无线充电发射装置与无线充电接收装置的定位对接。
进一步的,步骤T4具体包括:接收端控制装置发送指令给发射端控制装置,发射端控制装置接收到指令后启动无线充电发射装置;接收端控制装置检测到感应电压后,发射端控制装置通过高精密运动机构控制无线充电发射装置的位移,并根据接收端控制装置检测到的感应电压形成电压—偏移曲线,最后根据电压—偏移曲线控制无线充电发射装置在电压最高点停下,即实现无线充电发射装置与无线充电接收装置的定位对接。
进一步的,步骤T4具体包括:接收端控制装置发送指令给发射端控制装置,发射端控制装置通过高精密运动机构控制无线充电发射装置的位移,当无线充电发射装置与无线充电接收装置上的定位组件确认定位完成时,无线充电发射装置停止移动,即实现无线充电发射装置与无线充电接收装置的定位对接。
进一步的,所述定位组件包括分别设置于无线充电接收装置与无线充电发射装置上的激光定位发射器和激光定位接收器。
有益效果:本发明提供的无线充电系统及无线充电对位方法,相对于现有技术,具有以下优点:
1、该无线充电系统能够充分满足无线充电收发盘的定位精度要求,定位精度可达±5mm,有效保证高充电效率,节约能源和充电时间,具有结构简单、成本较低、重复定位精度高、稳定高效等优点。
2、该无线充电桩的高度可调,防护等级高,可在室外工作,杜绝了触电、充电头磨损和出现污物的风险,提高了自主充电的安全性、稳定性和使用寿命。
3、本发明提供了两种无线充电对位方法,通过使用定位组件和无线充电收发盘电压-距离曲线实现无线充电收发盘的精确定位,定位过程简单高效,对充电主体本身导航的定位要求较低,具有较高的普适性和推广价值。
附图说明
下面结合附图对本发明作进一步描写和阐述。
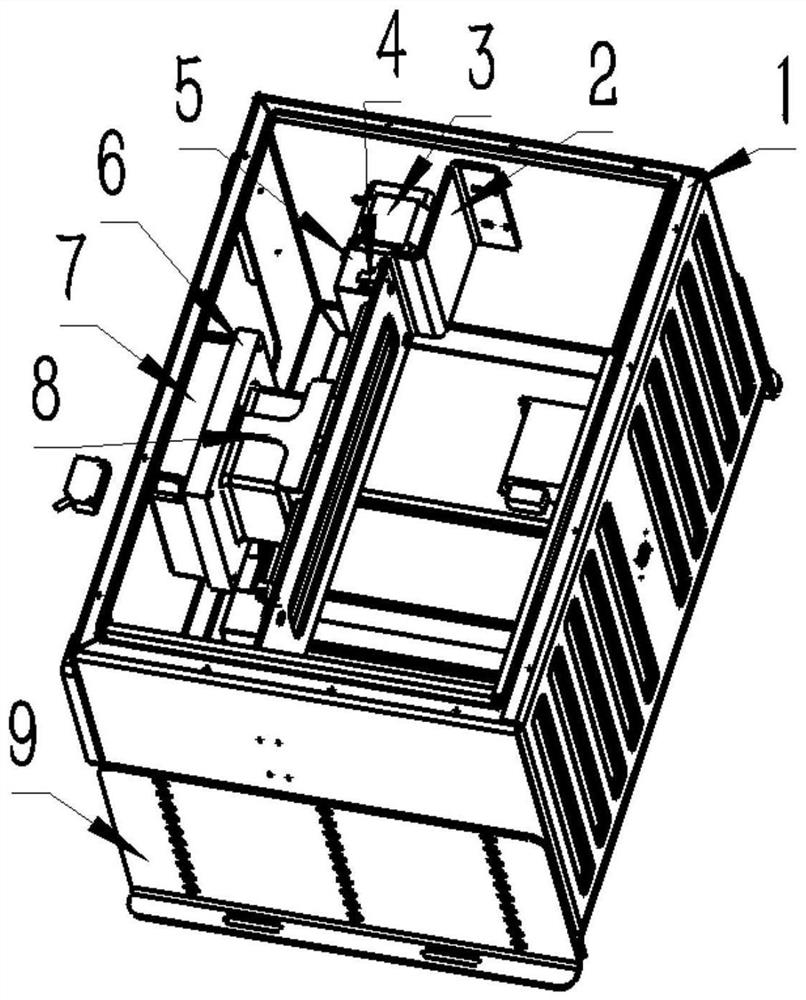
图1为本发明实施例一中无线充电桩的内部结构示意图;
图2为本发明实施例一中无线充电桩的内部结构俯视图;
图3为本发明实施例一中巡检机器人与无线充电桩的配合示意图;
图4为本发明实施例二中巡检机器人与无线充电桩的配合结构放大图;
图5为本发明实施例一中形成的电压—横向偏移曲线图;
图6为本发明实施例一所采用的无线充电对位方法流程图;
图7为本发明实施例二所采用的无线充电对位方法流程图。
图中的附图标记包括:1、充电桩壳体,2、模组支架,3、步进电机,4、光耦开关,5、丝杆模组,6、发射盘支架,7、发射盘,8、光耦感应支架,9、高度调节支架,10、防撞条,11、电机驱动器,12、发射盘主机,13、充电桩电路板,14、充电桩上盖,15、接收盘,16、接收盘支架,17、光电接近开关,18、开关支架,19、充电管理板,20、接收盘主机,21、巡检机器人,22、激光传感器,23、红外对射传感器发射端,24、红外对射传感器接收端。
具体实施方式
下面将结合附图对本发明的优选实施方式进行描述,更加清楚、完整地阐述本发明的技术方案。
实施例一:
如图3所示为一种无线充电系统,包括充电主体、无线充电桩,在本实施例中充电主体为巡检机器人21,其他实施方式中也可以是电动汽车、家用机器人或其他工业机器人等。
本实施例中,所述无线充电桩外壳包括充电桩壳体1、充电桩上盖14和高度调节支架9,高度调节支架9通过螺钉与充电桩壳体1连接,可通过高度调节支架9上的不同安装孔调整充电桩壳体1的安装高度。此外,所述充电桩壳体1上设有防撞条10,用于防撞,保护充电桩。
在其他实施方式中,高度调节机构还可以采用电动伸缩支架或其他形式的手动调节支架。如果采用高精度电动伸缩支架,则无线充电桩可根据充电主体的型号自动实现高度调控,进一步满足自动化充电对位的要求,扩大该无线充电系统的适用范围。
如图1、2所示,所述充电桩壳体1内设有高精密运动机构、无线充电发射装置、发射端控制装置,所述无线充电发射装置包括发射盘7、发射盘支架6,所述发射端控制装置包括与发射盘7电性连接的发射盘主机12、发射端控制器,所述高精密运动机构包括丝杆模组5、模组支架2、步进电机3、电机驱动器11。本实施例中,所述发射端控制器采用充电桩电路板13,在其他实施方式中也可采用其他控制器。
所述模组支架2固定于充电桩壳体1内,所述丝杆模组5包括平行布置于模组支架2上的滚珠丝杆、直线滑轨,所述滚珠丝杆上套接有与直线滑轨相适配的模组滑块,所述发射盘7通过发射盘支架6安装于模组滑块上,所述步进电机3布置于丝杆模组5的一侧,并与滚珠丝杆驱动连接,所述发射端控制器通过电机驱动器11实现步进电机3的驱动控制。
本实施例中,所述模组支架2上还设有光耦开关4,所述发射盘支架6上设有光耦感应支架8,通过光耦感应支架8与光耦开关4的配合实现发射盘7水平运动的左右限位。在其他实施方式中,也可采用其他定位开关来实现发射盘7的运动定位。
所述巡检机器人21上设有激光传感器22、限位开关、无线充电接收装置、接收端控制装置,所述激光传感器22用于实现机器人的激光导航,所述无线充电接收装置包括接收盘15、接收盘支架16,所述接收端控制装置包括与接收盘15电性连接的接收盘主机20、接收端控制器。本实施例中,所述接收端控制器采用充电管理板19和激光导航,在其他实施方式中也可采用其他控制器和导航方式。
本实施例中,所述限位开关包括对称布置于接收盘15两侧的光电接近开关17,所述光电接近开关17通过开关支架18安装于接收盘支架16上,光电接近开关17的感应距离可调,且精度为±2mm内。其他实施方式中也可采用其他满足定位精度要求的限位开关来实现充电主体与充电桩的距离控制。
如图6所示为一种无线充电对位方法,该无线充电对位方法通过光电接近开关17和收发盘的电压—横向偏移曲线进行充电对位,具体包括:
S1当机器人低电量时,开始搜寻附近的无线充电桩;
S2机器人通过激光导航快速移动到充电桩正前方1m处;
S3机器人低速靠近充电桩,并利用光电接近开关17停在充电桩前方设定距离2cm处,即实现机器人与充电桩在Y轴方向上的定位,定位精度在±2mm内;
S4充电管理板19通过蓝牙发送指令给发射盘主机12,发射盘主机12接收到指令后启动发射盘7;
S5接收盘主机20通过电压检测电路来检测接收盘15是否有感应电压:如果检测到感应电压,则接收盘主机20将检测到的感应电压通过蓝牙回传至充电桩电路板13,进行步骤S6;如果没有检测到感应电压,则重回步骤S2;
S6充电桩电路板13通过步进电机3控制发射盘7从丝杠最左端开始沿X轴方向移动,并根据接收盘主机20检测到的感应电压形成如图5所示的电压—横向偏移曲线,最后根据电压—横向偏移曲线控制发射盘7在电压最高点停下,即实现发射盘7与接收盘15在X轴方向上的定位,定位精度可达到±2mm;
S7充电桩电路板13发送充电指令给充电管理板19,开启充电模式并判断充电是否成功,如果成功则机器人开始充电,如果失败则重回步骤S6。
在机器人与充电桩的对位过程中,由于机器人和无线充电桩(也就是无线充电收发盘)在Z轴方向上的距离是固定的,所以不需要进行再次定位。而当机器人运行时间较长出现轮胎磨损或其他原因导致Z轴方向上的偏移后,无线充电桩可通过高度调节支架的安装孔进行Z轴方向上的再次定位。
实施例二:
本实施例中的无线充电系统与实施例一基本相同,不同点在于:如图4所示,所述接收盘支架16上设有红外对射传感器发射端23,所述发射盘支架6上设有红外对射传感器接收端24,通过红外对射传感器接收端24与红外对射传感器发射端23的配合实现发射盘7与接收盘15的对接确认。其他实施方式中也可采用其他满足定位精度要求的激光定位组件来实现发射盘7与接收盘15的定位确认。
如图7所示为一种无线充电对位方法,该无线充电对位方法通过光电接近开关17和安装于收发盘上的红外对射传感器进行充电对位,具体包括:
P1当机器人低电量时,开始搜寻附近的无线充电桩;
P2机器人通过激光导航快速移动到充电桩正前方1m处;
P3机器人低速靠近充电桩,并利用光电接近开关17停在充电桩前方设定距离2cm处,即实现机器人在Y轴方向上的定位,定位精度在±2mm内;
P4充电管理板19通过蓝牙发送指令给充电桩电路板13,充电桩电路板13通过步进电机3控制发射盘7从丝杠最左端开始沿X轴方向移动,当发射盘支架6上的红外对射传感器接收端24接收到接收盘支架16上的红外对射传感器发射端23发射的信号时,发射盘7停止移动,即实现发射盘7与接收盘15在X轴方向上的定位,红外对射传感器的定位精度可达到±5mm;
P5充电桩电路板13发送充电指令给充电管理板19,开启充电模式并判断充电是否成功,如果成功则机器人开始充电,如果失败则重回步骤P2,重新开始对位。
同样的,由于机器人和无线充电桩在Z轴方向上的距离是固定的,所以对位过程中不需要进行再次定位。而当机器人运行时间较长出现轮胎磨损或其他原因导致Z轴方向上的偏移后,无线充电桩可通过高度调节支架的安装孔进行Z轴方向上的再次定位。
上述实施方式中,高精密运动机构主要用于实现无线充电发射装置的横向位移调控,而在其他实施方式中,高精密运动机构还可以用于实现无线充电发射装置其他方向的位移调控,相应的,在各方向仍可以通过使用定位组件和无线充电收发盘电压-距离曲线实现无线充电收发盘的精确定位。
本发明中的充电桩防护等级可达到IP54,安装在充电主体侧的接收盘防护等级可达到IP65,接收盘主机和充电管理板安装在充电本体内部。该充电桩可实现非接触式充电,防护等级高,可在室外工作,杜绝了触电、充电头磨损和出现污物的风险,提高了自主充电的安全性、稳定性和使用寿命。
上述具体实施方式仅仅对本发明的优选实施方式进行描述,而并非对本发明的保护范围进行限定。在不脱离本发明设计构思和精神范畴的前提下,本领域的普通技术人员根据本发明所提供的文字描述、附图对本发明的技术方案所作出的各种变形、替代和改进,均应属于本发明的保护范畴。本发明的保护范围由权利要求确定。
- 无线充电对位系统和方法、电动车辆和无线充电发射系统
- 无线充电对位方法及装置、无线充电系统、电动车辆