双线激光雷达
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及激光雷达技术领域,特别是涉及一种双线激光雷达。
背景技术
目前,公知的三角测距激光雷达构造是由底座及旋转平台组成的,并且市面上的扫地机三角测距激光雷达无法快速、精准地识别数据线、电线、鞋子、宠物粪便等障碍物,导致卡机、线体缠绕、误扫、误触等情况的发生。
因此,提供一种能够帮助扫地机扩大避障检测范围与识别精度的激光雷达是目前亟待解决的技术问题。
发明内容
本发明的目的是提供一种双线激光雷达,以扩大避障和导航检测范围,提高识别精度。
为实现上述目的,本发明提供了如下方案:
一种双线激光雷达,所述激光雷达包括:激光发射器、分光镜、反光镜、两个接收器、主控制板和核心座;
所述核心座的左侧平行设置有第一激光发射通道和第二激光发射通道,所述第一激光发射通道位于所述第二激光发射通道的上方,所述第一激光发射通道和所述第二激光发射通道之间开设一分光通孔;在所述第一激光发射通道中沿着所述核心座的后端面至前端面方向依次设置所述激光发射器和所述分光镜,所述分光镜的反射方向对准所述分光通孔;所述反光镜设置在所述第二激光发射通道中的所述分光通孔正对位置;所述分光镜将所述激光发射器发出的发射激光进行透射和反射,透射的发射激光沿着所述第一激光发射通道从所述核心座的前端面射出,照射到目标物体上,反射的发射激光穿过所述分光通孔照射到所述反光镜,经所述反射镜的反射,沿着所述第二激光发射通道从所述核心座的前端面射出,照射到目标物体上;
两个所述接收器分别设置在所述核心座的中部和右侧;位于所述核心座中部的接收器的中心与所述第一激光发射通道的中心在同一水平线上,位于所述核心座右侧的接收器的中心与所述第二激光发射通道的中心在同一水平线上;
两个所述接收器均与所述主控制板连接,两个所述接收器均用于接收所述目标物体反射形成的反射激光,将所述反射激光转换为反射激光电信号,并将所述反射激光电信号传输至所述主控制板;
所述主控制板用于根据所述反射激光电信号获得所述激光雷达与目标物体的距离。
可选的,所述激光雷达还包括:信号采集板;
所述信号采集板设置在所述核心座的后端面;
所述接收器的信号输出端与所述信号采集板的输入端连接,所述信号采集板的控制端和输出端均与所述主控制板连接;所述信号采集板用于在所述主控制板的控制下按照预设频率采集所述接收器的反射激光电信号,并将采集的反射激光电信号传输至所述主控制板。
可选的,所述激光雷达还包括:滤光镜片;
所述滤光镜片设置在所述接收器的接收镜头的后方,所述滤光镜片与所述接收镜头相对设置,所述滤光镜片用于隔绝杂光。
可选的,所述激光雷达还包括:旋转结构和底座;
所述核心座设置在所述旋转结构上,所述旋转结构与所述底座可转动地连接;
所述旋转结构的控制端与所述主控制板连接,所述旋转结构用于在所述主控制板的控制下带动所述核心座进行旋转。
可选的,所述旋转结构包括:旋转盘、轴承、主动轮、传输带和马达;
所述旋转盘的上端面设置有所述核心座,所述旋转盘的下端面通过所述轴承与所述底座连接;
所述马达的输出轴与所述主动轮连接,所述主动轮通过所述传输带与所述轴承连接;
所述马达的控制端与所述主控制板连接。
可选的,所述激光雷达还包括:无线供电发射板、变压器和无线供电接收板;
所述无线供电发射板固定设置在所述旋转盘的上端面,所述核心座设置在所述无线供电发射板上;所述变压器设置与所述轴承的中部;所述无线供电接收板设置在所述底座的底部;
所述变压器的初级线圈与所述无线供电发射板连接,所述变压器的次级线圈与所述无线供电接收板连接;所述无线供电发射板用于将第一直流电转换为第一交流电,并将所述第一交流电传输至所述变压器的初级线圈;所述变压器用于将所述第一交流电转换为第二交流电,并将所述第二交流电传输至所述无线供电接收板;
所述无线供电接收板分别与所述激光发射器的电源输入端、两个所述接收器的电源输入端和所述主控制板的电源输入端连接,所述无线供电接收板用于根据所述第二交流电产生第二直流电,并利用所述第二直流电分别给所述激光发射器、两个所述接收器和所述主控制板供电。
可选的,所述无线供电发射板包括:发射壳体和交流转换器;
所述交流转换器设置在所述发射壳体的内部,所述发射壳体设置在所述旋转盘的上端面,所述核心座设置在所述发射壳体上;
所述交流转换器与所述变压器的初级线圈连接,所述交流转换器用于将第一直流电转换为第一交流电,并将所述第一交流电传输至所述变压器的初级线圈。
可选的,所述无线供电接收板包括:接收壳体、整流器和稳压器;
所述整流器和所述稳压器均设置在所述接收壳体的内部,所述接收壳体设置在所述底座的底部;
所述变压器的次级线圈与所述整流器连接,所述整流器与所述稳压器连接,所述整流器用于将所述第二交流电转换成第三直流电,并将所述第三直流电传输至所述稳压器;
所述稳压器分别与所述激光发射器的电源输入端、两个所述接收器的电源输入端和所述主控制板的电源输入端连接,所述稳压器用于根据所述第三直流电获得所述第二直流电,并利用所述第二直流电分别给所述激光发射器、两个所述接收器和所述主控制板供电。
可选的,所述激光雷达还包括:内线圈绕线座和外线圈绕线座;
所述外线圈绕线座设置在所述轴承的中部,所述内线圈绕线座设置在所述外线圈绕线座的中部;所述变压器的初级线圈绕制在所述内线圈绕线座上,所述变压器的初级线圈绕制在所述外线圈绕线座上。
可选的,所述激光雷达还包括:遮光罩和旋转盖;
所述激光发射通道、所述激光反光通道、两个所述接收器的前面设置有所述遮光罩;
所述旋转盖与所述无线供电发射板连接,所述核心座和所述遮光罩均设置在所述旋转盖与所述无线供电发射板形成的空腔内。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明提供了一种双线激光雷达,在核心座的左侧设置第一激光发射通道和第二激光发射通道,在第一激光发射通道中设置激光发射器和分光镜,第二激光发射通道设置反光镜,激光发射器向分光镜发出发射激光,分光镜进行透射和反射,透射的发射激光从核心座的前端面射出,照射到目标物体上,反射的发射激光穿过分光通孔照射到反光镜,经反射镜的反射,从核心座的前端面射出,照射到目标物体上;在核心座的中部和右侧设置两个接收器,接收器均与主控制板连接,接收器接收目标物体反射形成的反射激光,将反射激光转换为反射激光电信号,主控制板根据两个接收器的反射激光电信号获得激光雷达与目标物体的距离,扩大了避障和导航检测范围,提高了识别精度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明提供的一种双线激光雷达的结构图;
图2为本发明提供的一种双线激光雷达的前视图;
图3为本发明提供的一种双线激光雷达的后视图;
图4为本发明提供的一种双线激光雷达的俯视图;
图5为本发明提供的一种双线激光雷达的仰视图;
图6为本发明提供的一种双线激光雷达的分解图;
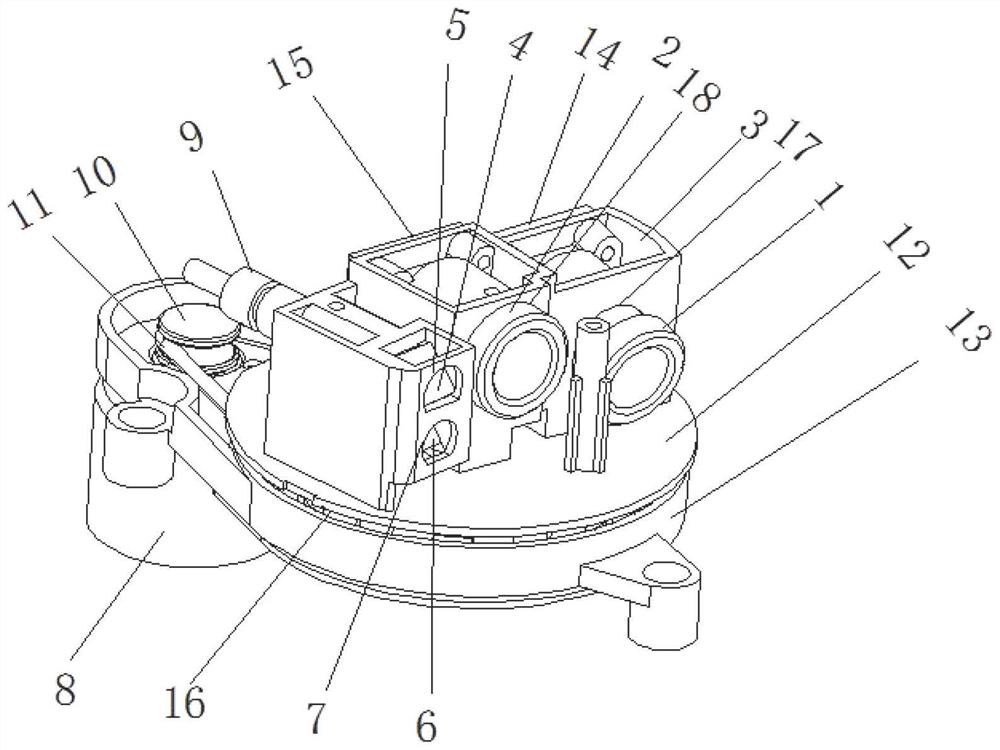
图7为本发明提供的一种双线激光雷达的整体图;
图8为本发明提供的核心座的左视图;
图9为本发明提供的核心座的前视图;
图10为本发明提供的核心座的后视图;
图11为本发明提供的无线供电的原理示意图;
图12为本发明提供的信号采集板的工作时序图;
符号说明:1-第一接收镜头,2-第二接收镜头,3-核心座,4-第一激光发射通道,5-分光镜,6-反光镜,7-第二激光发射通道,8-马达,9-激光发射器,10-主动轮,11-传输带,12-无线供电发射板,13-底座,14-第一信号采集板,15-第二信号采集板,16-旋转盘,17-第一镜头固定孔,18-第二镜头固定孔,19-第一滤光镜片,20-第二滤光镜片,21-分光通孔,22-激光圆孔,23-外线圈绕线座,24-内线圈绕线座,25-轴承,26-旋转盖,27-遮光罩,28-无线供电接收板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种双线激光雷达,以扩大避障和导航检测范围,提高识别精度。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
本发明提供了一种双线激光雷达,如图1-7所示,激光雷达包括:激光发射器9、分光镜5、反光镜6、两个接收器、主控制板(图1中未示出)和核心座3。
核心座3的左侧平行设置有第一激光发射通道4和第二激光发射通道7,第一激光发射通道4位于第二激光发射通道7的上方,第一激光发射通道4和第二激光发射通道7之间开设一分光通孔21。在第一激光发射通道4中沿着核心座3的后端面至前端面方向依次设置激光发射器9和分光镜5,如图8所示,激光发射器9具体设置在第一激光发射通道4的激光圆孔22中。分光镜5的反射方向对准分光通孔21。反光镜6设置在第二激光发射通道7中的分光通孔21正对位置。分光镜5将激光发射器9发出的发射激光进行透射和反射,透射的发射激光沿着第一激光发射通道4从核心座3的前端面射出,照射到目标物体上,反射的发射激光穿过分光通孔21照射到反光镜6,经反射镜的反射,沿着第二激光发射通道7从核心座3的前端面射出,照射到目标物体上。
其中,分光镜5的固定方式为在第一激光发射通道4的靠近核心座3的前端面设置一个分光斜面,把分光镜5用8008胶水固定在分光斜面上。反光镜6的固定方式为在第二激光发射通道7设一个反光斜面,把反光镜6用8008胶水固定在反光斜面上。透射的发射激光平行出射为导航雷达使用,反射的发射激光以水平面夹角12
两个接收器分别设置在核心座3的中部和右侧。位于核心座3中部的接收器的中心与第一激光发射通道4的中心在同一水平线上,位于核心座3右侧的接收器的中心与第二激光发射通道7的中心在同一水平线上。核心座3的结构参照图8-10所示。
两个接收器均与主控制板连接,两个接收器均用于接收目标物体反射形成的反射激光,将反射激光转换为反射激光电信号,并将反射激光电信号传输至主控制板。
主控制板用于根据反射激光电信号获得激光雷达与目标物体的距离。
激光雷达还包括:信号采集板。
信号采集板设置在核心座3的后端面。如图1和图3所示,在核心座3中部的后端也就是第一镜头固定孔17后端的上端靠近方形凹槽左端和右端分别设置一个固定孔,在核心座3后端的下端靠近方形凹槽左端和右端分别设置一个固定孔,把第一信号采集板14用螺丝通过核心座3后端的固定孔,把第一信号采集板14固定在核心座3中部的后端也就是第一镜头固定孔17的后端。第二信号采集板15的设置方式与第一信号采集板14相同,第二信号采集板15固定在核心座3右侧的后端。
接收器的信号输出端与信号采集板的输入端连接,信号采集板的控制端和输出端均与主控制板连接。信号采集板用于在主控制板的控制下按照预设频率采集接收器的反射激光电信号,并将采集的反射激光电信号传输至主控制板。
图12为信号采集板的工作时序图,第一信号采集板14和第二信号采集板15的输出为模拟信号,输出通道(Video)分别连接到主控芯片(主控制板)的两个ADC各自的通道上,利用ADC双端(并行)模式同时采集两个信号板的输出后进行数据处理。主控芯片为两个信号采集板提供一定频率的CLK,然后通过控制采集板的StartPulse(简称ST)引脚来决定信号采集板何时进行信号采集。在ST为高期间,采集板进行信号采集,在ST由高拉低后,再经过12个clocks,采集板通过信号输出引脚输出数据。主控芯片在每个触发信号(Trig)的上升沿进行数据的抓取。thp(ST)为ST的高期间,tlp(ST)为ST的低期间,tpi(ST)为ST的一个周期。integrationtime表示积分时间。
采集板和外部的信息交流通过UASRT串口进行,波特率为230400。可通过串口进行指令的接收和数据的发送。
激光雷达还包括:滤光镜片。滤光镜片设置在接收器的接收镜头的后方,在镜头固定孔后端设一个方形凹槽,把滤光镜片用8008胶水固定在方形凹槽里面,滤光镜片与接收镜头相对设置,滤光镜片用于隔绝杂光。
接收镜头设置在核心座3的前端面,核心座3右侧的前端面和中部的前端面分别设置镜头固定孔(如图1中的第一镜头固定孔17和第二镜头固定孔18),将接收镜头(如图1中的第一接收镜头1和第二接收镜头2)分别卡在镜头固定孔中,镜头固定孔起到固定接收镜头的作用。如图10所示,滤光镜片有两个,分别为第一滤光镜片19和第二滤光镜片20。第一滤光镜片19设置在第一接收镜头1的后方,第二滤光镜片20设置在第二接收镜头2的后方。
激光雷达还包括:旋转结构和底座13。核心座3设置在旋转结构上,旋转结构与底座13可转动地连接。旋转结构的控制端与主控制板连接,旋转结构用于在主控制板的控制下带动核心座3进行旋转。
旋转结构包括:旋转盘16、轴承25、主动轮10、传输带11和马达8。旋转盘16的上端面设置有核心座3,旋转盘16的下端面通过轴承25与底座13连接。马达8的输出轴与主动轮10连接,主动轮10通过传输带11与轴承25连接。马达8的控制端与主控制板连接。如图6所示,旋转结构还包括:外线圈绕线座23和内线圈绕线座24。
激光雷达还包括:无线供电发射板12、变压器和无线供电接收板28。无线供电发射板12固定设置在旋转盘16的上端面,核心座3设置在无线供电发射板12上。变压器设置与轴承的中部。无线供电接收板28设置在底座13的底部,底座13的底部设置四个固定孔,无线供电接收板28通过四个固定孔固定在底座13的底部。
变压器的初级线圈L1与无线供电发射板12连接,变压器的次级线圈L2与无线供电接收板28连接。无线供电发射板12用于将第一直流电转换为第一交流电,并将第一交流电传输至变压器的初级线圈L1。变压器用于将第一交流电转换为第二交流电,并将第二交流电传输至无线供电接收板28。
无线供电接收板28分别与激光发射器9的电源输入端、两个接收器的电源输入端和主控制板的电源输入端连接,无线供电接收板28用于根据第二交流电产生第二直流电,并利用第二直流电分别给激光发射器9、两个接收器和主控制板供电。
无线供电发射板12包括:发射壳体和交流转换器。交流转换器设置在发射壳体的内部,发射壳体设置在旋转盘16的上端面,核心座3设置在发射壳体上。交流转换器与变压器的初级线圈L1连接,交流转换器用于将第一直流电转换为第一交流电,并将第一交流电传输至变压器的初级线圈L1。
无线供电接收板28包括:接收壳体、整流器和稳压器。整流器和稳压器设置在接收壳体的内部,接收壳体设置在底座13的底部。变压器的次级线圈L2与整流器连接,整流器与稳压器连接,整流器用于将第二交流电转换成第三直流电,并将第三直流电传输至稳压器。稳压器分别与激光发射器9的电源输入端、两个接收器的电源输入端和主控制板的电源输入端连接,稳压器用于根据第三直流电获得第二直流电,并利用第二直流电分别给激光发射器9、两个接收器和主控制板供电。
激光雷达还包括:内线圈绕线座和外线圈绕线座。外线圈绕线座设置在轴承的中部,内线圈绕线座设置在外线圈绕线座的中部。变压器的初级线圈绕制在内线圈绕线座上,变压器的初级线圈绕制在外线圈绕线座上。
如图11所示,无线供电发射板12:DC 5V直流电通过交流转换器变成交流AC1,交流电通过变压器T1的初级线圈L1产生变化的电磁场。无线供电接收板28:电源接收板上的线圈L2通过接收到供电发射板发出的电磁场产生电流,产生AC 5V电压。这AC 5V电再经过整流、稳压等线路处理后,得到DC3.3V,供主控制板、激光发射、第一信号采集板14、第二信号采集板15使用。L1和L2结构上是分别独立的,设计上是方便雷达转动。
激光雷达还包括:遮光罩27和旋转盖26。激光发射通道、激光反光通道、两个接收器的前面设置有遮光罩27。旋转盖26与无线供电发射板12连接,核心座3和遮光罩27均设置在旋转盖26与无线供电发射板12形成的空腔内。
本发明在扫地机激光雷达上设置一个发射激光两个接收镜头来达到导航和避障功能,扩大避障和导航检测范围,提高了识别精度。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 双线激光雷达
- 激光雷达电机的一体式轴承、激光雷达电机及激光雷达