一种水下探测装置
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及水下机器人技术领域,特别涉及一种水下探测装置。
背景技术
现有的水下潜器主要分为:带缆线水下潜器(ROV)以及无缆线自主水下潜器(AUV)。带缆线水下潜器利用电缆线将水下潜器与陆地上的控制及数据采集装置以及电源装置连接,因此其航行距离及潜水深度受限。而无缆线自主水下潜器则将电源装置和部分控制及数据采集装置装配于水下潜器机身内部,其控制通过无线通信实现。因为机身内部装配有众多驱动装置(如电机、排水泵等)以及电源装置(蓄电池),导致机身较为笨重,需要较多的能源驱动。而机身内部空间有限,电源装置较小导致储电量较少。因此,无缆线自主水下潜器的潜行时间有限。
因而现有技术还有待改进和提高。
发明内容
鉴于上述现有技术的不足之处,本发明的目的在于提供一种水下探测装置,旨在解决现有技术中的水下探测装置因耗能高而造成的航行时间短的问题。
为了达到上述目的,本发明采取了以下技术方案:
本发明实施例提供了一种水下探测装置,其中,包括:
机壳;所述机壳呈仿生鳐鱼形;
多个太阳能板;多个所述太阳能板置于所述机壳的外表面;
储能装置;所述储能装置设置于所述机壳内部,且分别与多个所述太阳能板连接;
驱动装置;所述驱动装置设置于所述机壳内部,且与所述储能装置连接;所述驱动装置用于吸入机壳外部的水并排出以驱动所述水下探测装置运动。
进一步地,所述水下探测装置中,所述驱动装置包括第一驱动部件、第二驱动部件和第三驱动部件;所述第一驱动部件设置在所述机壳的中部,所述第二驱动部件和第三驱动部件分别位于所述第一驱动部件的两侧;其中,所述机壳的头部上开设有第一进水口、第二进水口和第三进水口,所述机壳的底部上开设有第一出水口,所述机壳的尾部上开设有第二出水口和第三出水口,所述第一驱动部件连通于所述第一进水口和第一出水口,所述第二驱动部件连通于所述第二进水口和第二出水口,所述第三驱动部件连通于所述第三进水口和第三出水口。
进一步地,所述水下探测装置中,所述第一驱动部件包括第一基体、第二基体、第一压电振子、第一单向阀、第二单向阀、第一通道以及第二通道;所述第一基体覆盖安装在所述第二基体上,所述第一通道设置在所述第二基体的一端、且连通所述第一进水口,所述第二通道设置在所述第二基体的另一端、且连通所述第一出水口;所述第一基体的中部和第二基体的中部开设有与所述第一基体和第二基体位于同一轴线上的第一泵腔,所述第一压电振子封盖于所述第一泵腔的上端面;所述第一单向阀的进水口连通于所述第一通道,所述第一单向阀的出水口连通于所述第一泵腔;所述第二单向阀的进水口连通于所述第一泵腔,所述第二单向阀的出水口连通于所述第二通道;其中,所述第二基体的另一端上开设有第一排水孔,所述第一排水孔连通于所述第二通道和所述第一出水口。
进一步地,所述水下探测装置中,所述第二驱动部件包括第三基体、第四基体、第二压电振子、第三单向阀、第四单向阀、第三通道以及第四通道;所述第三基体覆盖安装在所述第四基体上,所述第三通道设置在所述第四基体的一端、且连通于所述第二进水口,所述第四通道设置在所述第四基体的另一端、且连通于所述第二出水口;位于所述第三基体的中部和第四基体的中部、且远离所述第一驱动部件的侧面开设有第二泵腔,所述第二压电振子封盖于所述第二泵腔的上端面;所述第三单向阀的进水口连通于所述第三通道,所述第三单向阀的出水口连通于所述第二泵腔;所述第四单向阀的进水口连通于所述第二泵腔,所述第四单向阀的出水口连通于所述第四通道。
进一步地,所述水下探测装置中,所述第三驱动部件包括第五基体、第六基体、第三压电振子、第五单向阀、第六单向阀、第五通道以及第六通道;所述第五基体覆盖安装在所述第六基体上,所述第五通道设置在所述第六基体的一端、且连通于所述第三进水口,所述第六通道设置在所述第六基体的另一端、且连通于所述第三出水口;位于所述第五基体的中部和第六基体的中部、且远离所述第一驱动部件的侧面开设有第三泵腔,所述第三压电振子封盖于所述第三泵腔的上端面;所述第五单向阀的进水口连通于所述第五通道,所述第五单向阀的出水口连通于所述第三泵腔;所述第六单向阀的进水口连通于所述第三泵腔,所述第六单向阀的出水口连通于所述第六通道。
进一步地,所述水下探测装置中,所述第一单向阀、第二单向阀、第三单向阀、第四单向阀、第五单向阀和第六单向阀均为特斯拉阀。
进一步地,所述水下探测装置中,还包括探测装置、通信装置和控制及数据采集装置;所述探测装置和所述通信装置设置在所述机壳的外表面上,所述控制及数据采集装置设置在所述机壳内部;其中,所述控制及数据采集装置分别与所述探测装置和通信装置连接,所述储能装置分别与所述探测装置、通信装置和控制及数据采集装置连接。
进一步地,所述水下探测装置中,所述机壳包括可拆卸连接的第一壳体和第二壳体。
进一步地,所述水下探测装置中,所述机壳内开设有与所述储能装置的形状相适配的储能装置安装槽、与所述驱动装置的形状相适配的驱动装置安装槽以及与所述控制及数据采集装置的形状相适配的控制及数据采集装置安装槽。
进一步地,所述水下探测装置中,所述通信装置呈鱼尾状。
本发明所采用的技术方案具有以下有益效果:
本发明所提供的水下探测装置,包括机壳;所述机壳呈仿生鱼形;多个太阳能板;多个所述太阳能板置于所述机壳的外表面;储能装置;所述储能装置设置于所述机壳内部,且分别与多个所述太阳能板连接;驱动装置;所述驱动装置设置于所述机壳内部,且与所述储能装置连接;所述驱动装置用于吸入机壳外部的水并排出机壳,以驱动所述水下探测装置运动。本发明实施例中的水下探测装置具有扁平的外部结构,运动时受到水的阻力较小,且其表面积较大,可实现通过多个太阳能板提供能源,并通过所述低耗能的驱动装置吸入机壳外部的水并排出以产生反推力从而驱动所述水下探测装置运动,从而可实现长时间远距离的水下探测作业。
附图说明
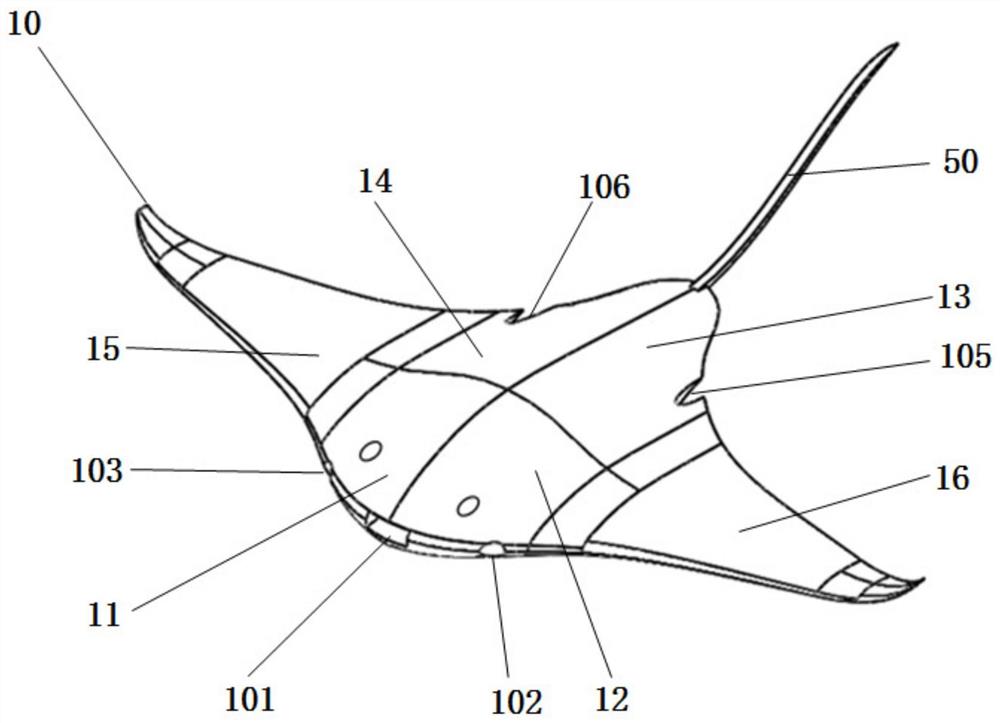
图1为本发明提供的一种水下探测装置的结构示意图;
图2为本发明提供的一种水下探测装置的爆炸结构示意图;
图3为本发明提供的一种水下探测装置中第一壳体的仰视图;
图4为本发明提供的一种水下探测装置中第二壳体的俯视图;
图5为本发明提供的一种水下探测装置中第一驱动部件的爆炸结构示意图;
图6为本发明提供的一种水下探测装置中第一驱动部件的主视剖视图;
图7为第二基体的俯视图;
图8为本发明提供的一种水下探测装置中第一驱动部件的驱动原理图;
图9为本发明提供的一种水下探测装置中第二驱动部件的爆炸结构示意图;
图10为第四基体的俯视图;
图11为本发明提供的一种水下探测装置中第三驱动部件的爆炸结构示意图;
图12为第六基体的俯视图;
图13为本发明提供的一种水下探测装置的中第一驱动部件和第二驱动部件的驱动原理图;
图14为本发明提供的一种水下探测装置的控制原理图。
具体实施方式
为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
在实施方式和申请专利范围中,除非文中对于冠词有特别限定,否则“一”与“所述”可泛指单一个或复数个。
另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
本发明公开了一种水下探测装置,请一并参阅图1至图14,包括:机壳10;所述机壳10呈仿生鳐鱼形;多个太阳能板;多个所述太阳能板置于所述机壳10的外表面;储能装置20;所述储能装置20设置于所述机壳10内部,且分别与多个所述太阳能板连接;驱动装置30;所述驱动装置30设置于所述机壳10内部,且与所述储能装置20连接;所述驱动装置30用于吸入机壳10外部的水并排出而产生反向推力以驱动所述水下探测装置运动。
在本发明实施例中,请一并参阅图1和图2,所述机壳10包括可拆卸连接的第一壳体1和第二壳体2;所述第一壳体1和第二壳体2的外形与鳐形目的水下生物的外形一致,例如,鳐鱼的外形。而多个所述太阳能板设置在所述第一壳体1的外表面上,用于吸收太阳能以给所述水下探测装置供能,由于鳐形目的水下生物具有扁平的外部结构,本发明中所述的水下探测装置为仿鳐鱼形的水下潜器,与阳光的接触面积大,利用太阳能供能;并且其扁平的外部结构可减小其运动时所受水的阻力,运动耗能低;其中,所述储能装置20和驱动装置30均容纳于所述第一壳体1和第二壳体2内。具体的,多块太阳能板包括设置在所述第一壳体1的外表面上的第一太阳能板11、第二太阳能板12、第三太阳能板13、第四太阳能板14、第五太阳能板15和第六太阳能板16;所述第一太阳能板11和第二太阳能板12对称设置在所述第一壳体1的头部两侧;所述第三太阳能板13和第四太阳能板14对称设置在所述第一壳体1的尾部两侧;所述第五太阳能板15和第六太阳能板16所述太阳能板对称设置在所述第一壳体1的两侧面上(鳐鱼形的胸鳍上)。
进一步地,所述水下探测装置还包括探测装置40、通信装置50和控制及数据采集装置60;所述探测装置40和所述通信装置50设置在所述机壳10的外表面上,所述控制及数据采集装置60设置在所述机壳10内部;其中,所述控制及数据采集装置60分别与所述探测装置40和通信装置50连接,所述储能装置20分别与所述探测装置40、通信装置50和控制及数据采集装置60连接;具体的,所述探测装置40对称设置在所述第一壳体1的头部(仿鱼眼设计),所述通信装置50设置在所述第一壳体1的尾部,用于和陆上的信号装置(图中未示出)进行无线数据传输。其中,为更好的适应水下环境,所述通信装置50呈鱼尾状。
在实际使用时,当所述水下探测装置工作于浅水区域时,第一壳体1外表面的第一太阳能板11、第二太阳能板12、第三太阳能板13、第四太阳能板14、第五太阳能板15以及第六太阳能板16可吸收太阳能,并将其储存位于第一壳体1和第二壳体2内部的储能装置20;所述储能装置20用于对所述驱动装置30、探测装置40、通信装置50以及控制及数据采集装置60进行供能。当需要进行水下探测时,陆上的信号装置发送的控制信号经过通信装置50传输至控制及数据采集装置60,储能装置20为驱动装置30提供能源,控制及数据采集装置60控制驱动装置30开启。所述驱动装置30启动,从第一壳体1和第二壳体2的外部吸入水,再将吸收的水以反方向排出,从而产生反推力,以此推动整个水下探测装置的运动。
具体的,所述驱动装置30包括第一驱动部件31、第二驱动部件32和第三驱动部件33;所述第一驱动部件31设置在所述机壳10的中部,所述第二驱动部件32和第三驱动部件33分别位于所述第一驱动部件31的两侧;其中,所述机壳10的头部上开设有第一进水口101、第二进水口102和第三进水口103,所述机壳10的底部上开设有第一出水口104,所述机壳10的尾部上开设有第二出水口105和第三出水口106,所述第一驱动部件31连通于所述第一进水口101和第一出水口104,所述第二驱动部件32连通于所述第二进水口102和第二出水口105,所述第三驱动部件33连通于所述第三进水口103和第三出水口106。
在本发明实施中,第一驱动部件31、第二驱动部件32、第三驱动部件33分别通过加工于第一壳体1和第二壳体2上的第一进水口101、第二进水口102和第三进水口103从机身外部吸入水,再将吸入的水别通过第一出水口104、第二出水口105和第三出水口106排出到第一壳体1和第二壳体2上外部以产生反推力,进而驱动所述水下探测装置的运动。
更具体的,请一并参阅图3和图4,所述第一壳体1的下表面加工有第一进水口101、第二进水口102、第三进水口103、第二出水口105以及第三出水口106。第二壳体2的上表面加工有第一进水口101、第二进水口102、第三进水口103、第一出水口104、第二出水口105以及第三出水口106。
进一步地,所述机壳10内开设有与所述储能装置20的形状相适配的储能装置安装槽201、与所述驱动装置30的形状相适配的驱动装置安装槽301以及与所述控制及数据采集装置60的形状相适配的控制及数据采集装置安装槽601。
具体的,第一壳体1的下表面还加工有用于固定所述储能装置20的储能装置安装槽201,用于固定所述控制及数据采集装置60的控制及数据采集装置安装槽601;其中,所述驱动装置安装槽301包括,第一安装槽302、第二安装槽303和第三安装槽304,分别用于第一驱动部件31、第二驱动部件32、第三驱动部件33安装定位。通信装置50安装于第一壳体1的后端,用于和陆上的信号装置进行无线数据传输。另外,第二壳体2的上表面同样加工有用于固定所述储能装置20的储能装置安装槽201,用于固定所述控制及数据采集装置60的控制及数据采集装置安装槽601;分别用于第一驱动部件31、第二驱动部件32、第三驱动部件33安装定位的第一安装槽302、第二安装槽303和第三安装槽304。
更进一步地,请一并参阅图5至图7,所述第一驱动部件31包括第一基体311、第二基体312、第一压电振子313、第一单向阀314、第二单向阀315、第一通道316以及第二通道317;所述第一基体311覆盖安装在所述第二基体312上,所述第一通道316设置在所述第二基体312的一端、且连通所述第一进水口101,所述第二通道317设置在所述第二基体312的另一端、且连通所述第一出水口104;所述第一基体311的中部和第二基体312的中部开设有与所述第一基体311和第二基体312位于同一轴线上的第一泵腔318,所述第一压电振子313封盖于所述第一泵腔318的上端面;所述第一单向阀的进水口3141连通于所述第一通道316,所述第一单向阀的出水口3142连通于所述第一泵腔318;所述第二单向阀的进水口3151连通于所述第一泵腔318,所述第二单向阀的出水口3152连通于所述第二通道317;其中,所述第二基体312的另一端上开设有第一排水孔3121,所述第一排水孔3121连通于所述第二通道317和所述第一出水口104。
在本发明实施例中,所述第一基体311的形状和第二基体312的形状相适配,可选的,所述第一基体311和第二基体312为长方体,所述第一泵腔318开设在所述第一基体311和第二基体312的轴线中部,所述第一泵腔318为圆形腔体,所述第一压电振子313为圆形振动片,接入交流电后的运动方式为上下简谐振动;第一压电振子313的直径为
相反,当第一压电振子313的振动状态为向下时,第一泵腔318内产生正压,由于第二单向阀315在方向I上具有较小的流阻,此时第一泵腔318内的水流依次经过第二通道的进水口3171、第二单向阀315、第二通道的出水口3172以及第一排水孔3121被排出第一驱动部件31外;而由于第一单向阀314在相反与方向I上具有较大的流阻,因此外部水流不会因为第一泵腔318内的正压而经由第一通道的出水口3162、第一单向阀314、第一通道的进水口3161被排出第一驱动部件31外。因此,第一压电振子313交替的上下高频振动,可使得第一驱动部件31在方向I上将其外部水流依次经过第一通道的进水口3161、第一单向阀314、第一通道的出水口3162吸入其内部,再将其内部的水流依次经过第二通道的进水口3171、第二单向阀315、第二通道的出水口3172以及第一排水孔3121在方向II上排出,排出的水流将产生与方向II相反方向的反推力。
请参阅图8,陆上的信号装置发送的控制信号经过通信装置50传输至控制及数据采集装置60,储能装置20为第一驱动部件31提供能源,控制及数据采集装置60控制第一驱动部件31的开启;第一驱动部件31内的第一通道的进水口3161与加工于第一壳体1、第二壳体2上的第一进水口101连通,第一驱动部件31内的第一排水孔3121与加工于第二壳体2上的第一出水口104相连通。被控制开启的第一驱动部件31在方向I上将第一壳体1和第二壳体2外部的水流吸入第一壳体1和第二壳体2内部,再在方向II上将第一壳体1和第二壳体2内部的水流排出机身外部以形成与方向II相反方向的反推力,进而可以驱动所述水下探测装置的上浮;控制及数据采集装置60控制第一驱动部件31关闭时,第一出水口104处无反推力产生,此时所述水下探测装置由于重力下沉。因此,所述第一驱动部件31用于控制所述水下探测装置的浮沉运动。
更进一步地,请一并参阅图9和图10,所述第二驱动部件32包括第三基体321、第四基体322、第二压电振子323、第三单向阀324、第四单向阀325、第三通道326以及第四通道327;所述第三基体321覆盖安装在所述第四基体322上,所述第三通道326设置在所述第四基体322的一端、且连通于所述第二进水口102,所述第四通道327设置在所述第四基体322的另一端、且连通于所述第二出水口105;位于所述第三基体321的中部和第四基体322的中部、且远离所述第一驱动部件31的侧面开设有第二泵腔328,所述第二压电振子323封盖于所述第二泵腔328的上端面;所述第三单向阀的进水口3241连通于所述第三通道326,所述第三单向阀的出水口3242连通于所述第二泵腔328;所述第四单向阀的进水口3251连通于所述第二泵腔328,所述第四单向阀的出水口3252连通于所述第四通道327。
在本发明实施例中,所述第三基体321的形状和第四基体322的形状相适配,可选的,所述第三基体321和第四基体322为长方体,所述第二泵腔328开设在所述第三基体321和第四基体322的轴线中部、且远离所述第一驱动部件31的侧面,其中,所述第二泵腔328为圆形腔体,所述第三通道的出水口3262连通于所述第二泵腔328和所述第三单向阀的出水口3242,所述第四通道的进水口3271连通于所述第二泵腔328和所述第四单向阀的进水口3251。
具体的,陆上的信号装置发送的控制信号经过通信装置50传输至控制及数据采集装置60,储能装置20为第二驱动部件32提供能源,控制及数据采集装置60控制第二驱动部件32的开启;第二驱动部件32内的第三通道的进水口3261与加工于第一壳体1、第二壳体2上的第二进水口102连通。所述第四通道的出水口3272与加工于第一壳体1和第二壳体2上的第二出水口105相连通。被控制开启的第二驱动部件32在方向III上将第一壳体1和第二壳体2外部的水流吸入第一壳体1和第二壳体2内部,再在方向IV上将第一壳体1和第二壳体2内部的水流排出机身外部以形成与方向IV相反方向的反推力,进而可以驱动所述水下探测装置的向前运动或转向运动;需要说明的是,在此仅对所述第二驱动部件32的工作过程进行,而所述第二驱动部件32的工作原理与所述第一驱动部件31的工作原理类似,故在此不再赘述。
更进一步地,请一并参阅图11和图12,所述第三驱动部件33包括第五基体331、第六基体332、第三压电振子333、第五单向阀334、第六单向阀335、第五通道336以及第六通道337;所述第五基体331覆盖安装在所述第六基体332上,所述第五通道336设置在所述第六基体332的一端、且连通于所述第三进水口103,所述第六通道337设置在所述第六基体332的另一端、且连通于所述第三出水口106;位于所述第五基体331的中部和第六基体332的中部、且远离所述第一驱动部件31的侧面开设有第三泵腔338,所述第三压电振子333封盖于所述第三泵腔338的上端面;所述第五单向阀的进水口3341连通于所述第五通道336,所述第五单向阀的出水口3342连通于所述第三泵腔338;所述第六单向阀的进水口3351连通于所述第三泵腔338,所述第六单向阀的出水口3352连通于所述第六通道337。
在本发明实施例中,在本发明实施例中,所述第五基体331的形状和第六基体332的形状相适配,可选的,所述第五基体331和第六基体332为长方体,所述第三泵腔338开设在所述第五基体331和第六基体332的轴线中部、且远离所述第一驱动部件31的侧面,所述第三泵腔338与所述第二泵腔328对称设置,其中,所述第三泵腔338为圆形腔体,所述第五通道的出水口3362连通于所述第三泵腔338和所述第五单向阀的出水口3342,所述第六通道的进水口3371连通于所述第三泵腔338和所述第六单向阀的进水口3351。
具体的,陆上的信号装置发送的控制信号经过通信装置50传输至控制及数据采集装置60,储能装置20为第三驱动部件33提供能源,控制及数据采集装置60控制第三驱动部件33的开启;第三驱动部件33内的第五通道的进水口3361与加工于第一壳体1、第二壳体2上的第三进水口103连通。所述第六通道的出水口3372与加工于第一壳体1和第二壳体2上的第三出水口106相连通。被控制开启的第三驱动部件33在方向V上将第一壳体1和第二壳体2外部的水流吸入第一壳体1和第二壳体2内部,再在方向VI上将第一壳体1和第二壳体2内部的水流排出机身外部以形成与方向VI相反方向的反推力,进而可以驱动所述水下探测装置的向前运动或转向运动;需要说明的是,在此仅对所述第三驱动部件33的工作过程进行,而所述第三驱动部件33的工作原理与所述第一驱动部件31的工作原理类似,故在此不再赘述。
更具体的,请参阅图13,当第二驱动部件32和第三驱动部件33都被控制开启时,第一壳体1和第二壳体2外部的水在方向III和方向V上被吸入第一壳体1和第二壳体2内部,然后第一壳体1和第二壳体2内部的水流在方向IV和方向VI上被排出,以此产生反向推力以驱动所述水下探测装置向相反于方向IV或方向VI上运动;而当第二驱动部件32被控制开启,第三驱动部件33被控制关闭时,由于第二驱动部件32被布置于所述水下探测装置中轴线的侧向位置,其产生的反推力将驱动所述水下探测装置在方向VIII上实现转向;相反,当第二驱动部件32被控制关闭,第三驱动部件33被控制开启时,由于第三驱动部件33被布置于所述水下探测装置中轴线的另外一个侧向位置,其产生的反向推力将驱动所述水下探测装置在方向VII上实现转向。因此,对第二驱动部件32和第三驱动部件33的开、闭进行耦合控制,可实现所述水下探测装置的向前运动以及转向运动。
其中,所述第一单向阀314、第二单向阀315、第三单向阀324、第四单向阀325、第五单向阀334和第六单向阀335均为特斯拉阀。所述特斯拉阀为现有结构,故在此不做赘述。
可选的,所述第一壳体1、第二壳体2,以及第一驱动部件31、第二驱动部件32和第三驱动部件33中的各个的上基体和下基体均选用轻质的塑料材质(如ABS塑料、PET塑料、尼龙材料等)。
值得一提的是,现有技术中利用太阳能的水下潜器,常常由于其外表面与阳光接触的面积较小,只能提供有限的能源,导致续航时间及距离较短。并且现有的水下潜器大都依靠电机驱动的螺旋桨实现前进、转向以及浮沉;仿生机器人依靠仿生鱼鳍的摆动以实现运动;潜水艇依靠外置的螺旋桨实现前进和转向,利用排、吸水实现浮沉运动。这些水下潜器大都具有较多的外部活动件,用于军事领域的水下探测其隐蔽性较差,而用于水产养殖的探测时易惊扰水下生物。另外,置于机身外部的螺旋桨的旋转运动易受到水下杂物(水草、鱼群、人造垃圾等)的干扰及破环。因此,现有的水下探测装置具有机身笨重、耗能高、续航时间及距离短、隐蔽性差等缺点。
而本发明中的水下探测装置相比较现有技术有以下优点:
(1)鳐形目的水下生物具有扁平的外部结构,本发明中所述的水下探测装置的机壳10为仿鳐鱼形的水下潜器,与阳光的接触面积大,利用多个太阳能板收集太阳能进行供能;并且机壳10扁平的外部结构可减小其运动时所受水的阻力,运动耗能低。
(2)本发明中的水下探测装置配置有多个太阳能板、储能装置20、驱动装置30、通信装置50、控制及数据采集装置60;储能装置20对太阳能进行储能,而储能装置20对驱动装置30、通信装置50、控制及数据采集装置60供能,控制信号以及数据采集信号通过无线通信装置50传输,无需额外的通信电缆,其航行距离以及下潜深度不受限。机身搭载有两个探测装置40(摄像机),探测时可实时获得水下二维图像信息。通过双目视差原理,将所得图像信息进行后处理,也可获得水下的三维图像信息。
(3)本发明中的水下探测装置的驱动装置30中的各个驱动部件为阀泵结构,且各个驱动部件均安装于机身内部,由加工于机壳10上的对应位置的进水孔将机壳10外的水吸入,并由机壳10上的排水孔将水排出,产生的反推力将驱动水下探测器的运动。各个驱动部件的核心部件为圆形压电振子(直径
(4)本发明中的水下探测装置的优势在于:其表面采光面积大,可获得较多的太阳能。扁平的外部结构使其运动阻力较小;驱动装置30为3个40克的压电振子,使得其机身较轻;因此,所述水下探测器运动耗能小。核心驱动器件为3个功率仅为35W的压电振子,无需较大体积的电源装置。
(5)本发明中的水下探测装置无外部活动件,其驱动仅依靠布置于其机壳10内部的压电振子的上下简谐振动。因此,其航行过程中,各个驱动部件受水下杂物(水草、鱼群、人造垃圾等)的影响较小。另外,其无外部活动件的特点使得其隐蔽性较好,可用于军事探测;用于水产养殖领域中的水下观察时,其较小的噪声、仿生的外观可避免对水下生物造成惊扰。
(6)本发明中的水下探测装置所采用的驱动装置30结构简单,工作寿命长。其加工与安装方便,成本较低。
(7)因此,本发明中的水下探测装置具有低能耗、机身轻便、成本低、寿命长、航行距离远、低噪声、隐蔽性好的优点,可实现长时间远距离的水下探测作业。
下面结合图14对本实施例中的水下探测装置的工作原理进行介绍:
所述水下探测装置在浅水区域工作时,布置于第一壳体1上的阳能板11、第二太阳能板12、第三太阳能板13、第四太阳能板14、第五太阳能板15以及第六太阳能板16可吸收射入水下的阳光,并将其转化为太阳能储存于储能装置20,储能装置20可对第一驱动部件31、第二驱动部件32、第三驱动部件33、探测装置40、通信装置50以及控制及数据采集装置60提供能量。通信装置50采用无线通信方式,可将陆上的信号装置发出的控制信号传递给控制及数据采集装置60,控制及数据采集装置60根据信号可控制第一驱动部件31、第二驱动部件32、第三驱动部件33的开启和关闭,进而控制所述水下探测装置的运动;探测装置40为相机等光学设备,其获得的水下图像数据传递给控制及数据采集装置60,再由通信装置50通过无线通信方式实时地发送到陆上的终端设备,以此达到水下探测的目的。
综上所述,本发明提供了一种水下探测装置,包括机壳;所述机壳呈仿生鳐鱼形;多个太阳能板;多个所述太阳能板置于所述机壳的外表面;储能装置;所述储能装置设置于所述机壳内部,且分别与多个所述太阳能板连接;驱动装置;所述驱动装置设置于所述机壳内部,且与所述储能装置连接;所述驱动装置用于吸入水并排出以驱动所述水下探测装置运动。本发明实施例中的水下探测装置具有扁平的外部结构,运动时受到水的阻力较小,且其表面积较大,可实现通过多个太阳能板提供能源,并通过所述低耗能的驱动装置吸入机壳外部的水并排出以产生反推力从而驱动所述水下探测装置运动,从而可实现长时间远距离的水下探测作业。
本领域技术人员在考虑说明书及实践这里公开的方案后,将容易想到本发明的其它实施方案。本发明旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由权利要求所指出。
- 一种基于水下低频电场的探测装置及水下探测定位方法
- 一种海上风电场用水下探测装置