用于激光加工的光纤自动聚焦方法、及自动聚焦系统
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及通过激光对光纤进行加工的技术领域,尤其涉及用于激光加工的光纤自动聚焦方法、及自动聚焦系统。
背景技术
通过激光对光纤进行加工可制备光纤光栅或者微腔。光纤光栅是使光纤纤芯的折射率发生轴向周期性调制而形成的衍射光栅,是一种无源滤波器件。光纤光栅具有反射带宽范围大、附加损耗小、体积小,易与光纤耦合,可与其它光器件兼容成一体,不受环境尘埃影响等一系列优异性能,且其谐振波长对温度、应变、折射率、浓度等外界环境的变化比较敏感,因此在制作光纤激光器、光纤通信和传感领域得到了广泛的应用,在光纤通信和传感领域中都是十分重要的器件。
而采用激光例如飞秒激光写入的方法制作光纤布拉格光栅,可以在所有带有多种涂层的透明光纤、高端特种光纤以及低成本商用光纤上写入光纤布拉格光栅。与传统的相位掩膜板法进行光纤布拉格光栅制作的方法相比,飞秒激光写入制作的光纤布拉格光栅能在极端温度条件下工作,工作温度超过了1000°C,并且具有超强的抗拉伸强度,耐腐蚀、耐高温高湿环境等特点。
现有利用激光制备光纤光栅的方法中,都需要人手动将待加工的一段光纤设置在运动机构上,再手动调节运动机构的六个轴向,使得激光能聚焦在纤芯正中位置。但是现有的手动聚焦方法,不仅前期准备、调平工作繁琐,而且聚焦的精度差,不利于大规模光纤光栅阵列的制备,妨碍了光纤光栅或微腔传感器在分布式光纤传感领域中的使用。
另外,在一段光纤加工结束后将下一段光纤移动至加工区域后还要重复整个调平的工作才能进行下一段的制备;此外受限于运动机构的性能以及光学平台的隔振能力,在光纤平移的过程中难以保持绝对地平行,稍有抖动激光便会偏离纤芯正中央,造成损耗增大,一致性降低。
发明内容
为了克服上述现有技术的缺点,本发明提供了用于激光加工的光纤自动聚焦方法及自动聚焦系统,具有定位精度高、聚焦速度快﹑硬件要求低、便于集成等优点,提高了制备精度和效率,并能对不同种类光纤进行加工。尤其适用于大规模光纤光栅或微腔传感器阵列制备。
本发明的目的在于提供一种用于激光加工的光纤自动聚焦方法及系统。
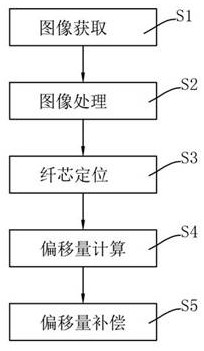
本申请提供的一种用于激光加工的光纤自动聚焦方法,包括如下步骤:
S1,图像获取:获取待加工光纤的图像;
S2,对图像处理获得图像边缘;
S3,纤芯定位:对图像边缘进行非极大值抑制处理以及离散边缘连接处理获得精细的纤芯的上下边缘;
S4,偏移量计算:根据纤芯上下边缘计算偏移量;
S5,偏移量补偿:根据偏移量的信息进行补偿,使激光聚焦在光纤上的目标位置。
作为本发明提供的光纤自动聚焦方法的一种改进,在步骤S3中,非极大值抑制处理的方法包括S31:
首先筛选出大于阈值的点;
接着对筛选出的点逐一判断,判定梯度是否是水平或者垂直方向的上的局部极大值,如果是则保留;若不是则继续判断下一个点直到找到极大值为止。
作为本发明提供的光纤自动聚焦方法的一种改进,在步骤S3中,离散边缘连接的方法包括S32:
逐一检测非极大值抑制处理后保留的各个点与相邻点幅度与角度的差值,在一定的范围内就认定处于同一条边缘并进行连线。
作为本发明提供的光纤自动聚焦方法的一种改进,在步骤S3中,在还包括以下步骤:
对包含步骤S32提取到边缘的图像进行横向的像素灰度求和并获得灰度平均值;
根据沿光纤径向方向上的灰度呈对称分布的关系定位到光纤纤芯的上下边缘。
作为本发明提供的光纤自动聚焦方法的一种改进,在步骤S2中,对图像处理获得图像边缘的方法包括以下步骤:
S21,将获取到的图像转化为灰度图,并对灰度图进行灰度均衡处理;
S22,灰度均衡处理后的图像通过卷积运算进行滤波,以去除特定频段的噪声;
S23,滤波结束后,通过差分处理与梯度求解处理得到初步的图像边缘。
作为本发明提供的光纤自动聚焦方法的一种改进,在步骤S22中,通过卷积运算进行滤波的方法包括:构建图像滤波器核函数,将核函数分别与两幅灰度图进行卷积运算去除特定频段的噪声;
在步骤S23中,差分处理的方法是:将通过卷积运算得到的两幅图像逐像素地进行减法运算以提取出两幅图像的差异信息,得到二维矩阵;
在步骤S23中,梯度求解处理的方法是:对差分处理后求得的二维矩阵进行梯度方向的求解,对差分处理后求得的二维矩阵进行梯度强度的求解。
作为本发明提供的光纤自动聚焦方法的一种改进,在步骤S21中,将获取到的图像转化为灰度图得到灰度直方图,通过灰度均衡处理改变直方图的均值和标准差。
作为本发明提供的光纤自动聚焦方法的一种改进,根据图像的灰度直方图对图像获取时的光照进行评价,并根据评价结果来进行光照补偿。
作为本发明提供的光纤自动聚焦方法的一种改进,在步骤S4中:
根据步骤S3提取到的纤芯上下边缘,通过函数拟合换算出像素坐标系下的位置偏移量和聚焦偏移量;
再把像素坐标系中的位置偏移量和聚焦偏移量转换为世界坐标系下的位置偏移量和聚焦偏移量。
作为本发明提供的光纤自动聚焦方法的一种改进,在步骤S5中,偏移量补偿包括:
在加工前,根据偏移量调整光纤相对激光聚焦点的位置;
在加工过程中,根据偏移量调整光纤相对激光聚焦点的位置。
作为本发明提供的光纤自动聚焦方法的一种改进,在加工过程中的偏移量补偿包括:
对短程运动的补偿以及对长程运动的补偿;
所述对短程运动的补偿,用于在光纤的加工过程中移动光纤位置时进行补偿;所述对长程运动的补偿,用于在一段光纤加工结束后将下一段光纤移动至加工区域过程中进行补偿;
所述对短程运动的补偿速度较慢但精度较高,所述对长程运动的补偿速度较快但精度较低。
作为本发明提供的光纤自动聚焦方法的一种改进,在对短程运动的补偿时,
对短程运动的运动路径进行分段采样,对各个分段点进行偏移量的计算,通过插值计算得到整个过程中的偏移量;最后根据整个过程中的偏移量对运动轨迹进行修正并规划一个新的运动轨迹。
本申请还提供的一种用于激光加工的光纤自动聚焦系统,其通过上述权利的光纤自动聚焦方法进行聚焦。
本发明具有如下有益效果:
本发明提供的用于激光加工的光纤自动聚焦方法、及自动聚焦系统,能够实现激光在光纤的自动聚焦,使激光聚焦在光纤上的目标位置。定位精度高、聚焦速度快,并能对不同种类光纤进行加工。
附图说明
图1本发明实施例提供的一种用于激光加工的光纤自动聚焦方法的示意图;
图2为本发明实施例提供的一种激光加工系统的结构示意图;
图3为本发明实施例提供的一种光纤自动聚焦系统的结构示意图;
图4为本发明实施例提供的一种图像处理模块的示意图;
图5是图像识别算法定位纤芯的示意图;
图6为本发明实施例提供的一种光纤自动聚焦系统的路径规划模块的工作步骤示意图;
图7为本发明实施例提供的一种运动控制模块的结构示意图;
图8为本发明实施例提供的一种运动控制模块的结构示意图;
图9为本发明实施例提供的一种运动控制模块的结构示意图。
附图标注:
图像获取模块10,图像处理模块20,运动控制模块30,光纤夹持模块40、照明控制模块50,灰度均衡模块21,滤波模块22,边缘提取模块23,偏移量计算模块24,短程运动控制模块32,长程运动控制模块31,位置修正模块33,旋转运动控制模块34,激光器101,电控快门102、反射镜103,物镜104,CCD相机105,光源106,光纤夹具107,位移平台108,第一控制器109,光纤线轴110,第二控制器111,计算机112。
具体实施方式
下面结合附图和实施例对本发明进行详细的说明。
本申请具体实施例提供了一种用于对光纤进行激光加工的激光加工系统。包括激光光路系统、以及光纤自动聚焦系统。
其中,如图2所示,激光光路系统包括激光器101、反射镜103、光阑、电控快门102、物镜104。激光器101所提供的激光束用于光纤微加工;激光束经过反射镜103后经过物镜进行聚焦,使激光光束的聚焦点位于光纤上待加工位置处。
如图3所示,光纤自动聚焦系统包括:
图像获取模块10,用于获取待加工光纤的图像;
图像处理模块20,用于对图像进行处理,并根据纤芯的上下边缘计算偏移量;
光纤夹持模块40,用于固定光纤并带动光纤移动;
运动控制模块30,根据偏移量的信息驱动光纤移动。
光纤夹持模块40用于在加工和运动的过程中固定光纤。光纤夹持模块40,包括光纤夹具107。
本申请具体实施例提供了一种用于激光加工的光纤自动聚焦方法,包括如下步骤:
S1,图像获取:获取待加工光纤的图像;
S2,对图像处理获得图像边缘;
S3,纤芯定位,获得纤芯边缘:对图像边缘进行非极大值抑制处理以及离散边缘连接处理获得精细的纤芯的上下边缘;
S4,偏移量计算:根据纤芯上下边缘计算偏移量;
S5,偏移量补偿:根据偏移量的信息进行补偿,使激光聚焦在光纤上的目标位置。
需要说明的是,激光聚焦在光纤上的目标位置,既可以是纤芯正中的位置,也可以是纤芯上偏离纤芯正中一个特定距离的位置,还可是光纤上的包层上的目标位置。
对步骤S1的说明如下:
在步骤S1中,利用图像获取模块10获取待加工光纤的图像,获取得到的图像将进行后续的图像处理进行进一步的处理。图像获取模块10包括图像传感器,图像获取模块10例如为CCD相机105 。
图像获取的步骤包括:
将传入的模拟图像信号通过“模数转换器A/D”转换成数字信号,传送到图像处理器上,经处理得到图像,最终完成世界坐标系到图像坐标系的转换;
根据“模数转换器”转换得到的数字信号,对曝光时间以及处理得到的图像亮度、对比度、饱和度、分辨率等参数进行调整。
步骤S2- S4,均通过图像处理器进行。
图像处理器包含:灰度均衡模块21,滤波模块22,边缘提取模块23,偏移量计算模块24,如图4所示。偏移量计算模块24还包括坐标转换模块。
对步骤S2的说明如下:
在步骤S2中,对图像处理获得图像边缘的方法包括以下步骤:
S21,通过灰度均衡模块21,将获取到的数字图像转化为灰度图,并对灰度图进行灰度均衡处理;
S22,通过滤波模块22,将灰度均衡处理后的图像通过卷积运算进行滤波,以去除特定频段的噪声;
S23,滤波结束后,通过差分处理与梯度求解处理得到初步的图像边缘。
图像处理器包括DSP微处理器/FPGA集成电路。
DSP微处理器/FPGA集成电路中包括上述灰度均衡模块21和滤波模块22,通过DSP微处理器/FPGA集成电路实现上述步骤S21、步骤S22,滤除低频的杂波信号后再对高频信号进行放大。
DSP微处理器/FPGA集成电路中还包括上述边缘提取模块23,通过DSP微处理器/FPGA集成电路的边缘提取模块23实现上述步骤S23。
在步骤S21中,首先,通过灰度均衡模块21,对步骤S1获取传入的数字图像进行灰度处理,通过色彩空间的变换完成彩色图对灰度图的转化,将获取到的图像转化为灰度图并得到其灰度直方图;
公式(1)表示的是将彩色图像转换为灰度图像的计算过程,其中R、G和B分别代表彩色图像的三个通道。
接着,对图像的灰度直方图进行操作,通过灰度均衡处理改变直方图的均值和标准差。
其中
灰度均衡化处理得到的结果将进入步骤S22进行进一步处理。
在步骤S22中,使用滤波模块22进行卷积运算以去除特定频段的噪声。滤波的方法包括:构建图像滤波器核函数,将核函数分别与两幅灰度图进行卷积运算。
具体的,先对滤波器核函数进行构建,滤波器核函数可以表示为公式(3):
公式(3)展示的是一种二维的高斯滤波函数,二维高斯函数为x,y两个方向的一维高斯函数的乘积。
核函数的类型和阶数由灰度均衡模块21进行控制。滤波的思路就是:对函数核函数进行离散化,以离散点上的函数值为权值,对我们图像矩阵的每个像素点做一定范围邻域内的加权平均,即可有效消除噪声。
两幅图像分别与核函数进行卷积可以表示为公式(4)、公式(5):
公式(4)和公式(5)表示的是将图像
可通过卷积运算器、加法器等器件实现步骤S22的卷积运算。
边缘提取模块23还包括差分处理模块、梯度处理模块。
在步骤S23中,通过差分处理模块进行差分处理的方法是:将通过卷积运算得到的两幅图像逐像素地进行减法运算以提取出两幅图像的差异信息,得到二维矩阵。差分处理通过以下公式(6):
由于卷积运算具有结合律,因此对两幅卷积运算得到的两幅图像逐像素地进行减法运算等价于对先对两个滤波核函数进行减法运算,再与图形进行卷积运算,如此便可大幅降低计算的复杂度,正如公式(6)所示。
两幅图像逐像素地进行减法运算可以提取出两幅图像中共有的频带中含有的空间信息。因此这里的差分处理就相当于一个能够去除除了那些在原始图像中被保留下来的频率之外的所有其他频率信息的带通滤波器。
在步骤S23中,通过梯度处理模块进行梯度求解处理的方法是:运用公式(7)对差分处理后求得的二维矩阵进行梯度方向的求解,运用公式(8)对差分处理后求得的二维矩阵进行梯度强度的求解以强化边缘信息。
梯度方向的求解公式如下:
其中G
其中
光照补偿:
需要补充的是,在步骤S21之后,可以根据图像的灰度直方图对图像获取时的光照进行评价,并根据评价结果来进行光照补偿,以便获取质量更佳的图像。
上述的光照补偿主要包括:对照明光源的发光强度、颜色、发光面宽度、发光面长度、以及光源与光纤的间距中的任意一项进行调节。
本申请具体实施例的用于激光加工的光纤自动聚焦系统,如图3所示,光纤自动聚焦系统还包括光源106,光源106用于在图像传感器获取待加工光纤的图像时提供光照。
光纤自动聚焦系统还包括照明控制模块50。照明控制模块50包含:光照评价模块,照明光源控制模块。
其中,光照评价模块,可根据灰度均衡模块21传入的灰度直方图对当前光照条件下获取图像的成像质量进行判断,判断当前光照效果是否满足步骤S2的图像处理正常工作的条件,得到一个可以量化的指标,并将评价结果(处理结果)输出给照明光源控制模块。
其中,照明光源控制模块,用于根据光照评价模块计算的得到的评价指标来调节照明光源的相关参数,以实现对光照进行补偿。
对步骤S3的说明如下:
在步骤S3中,通过边缘提取模块23进行非极大值抑制处理以及离散边缘的连接以获得精细的边缘。
通过边缘提取模块23进行非极大值抑制处理,具体方法包括步骤S31:
首先筛选出大于阈值的点;
接着对筛选出的点逐一判断,判定梯度是否是水平或者垂直方向的上的局部极大值,如果是则保留;若不是则继续判断下一个点直到找到极大值为止。
在步骤S3中,通过边缘提取模块23进行离散边缘连接,具体方法包括步骤S32:
逐一检测非极大值抑制处理后保留的各个点与相邻点幅度与角度的差值,在一定的范围内就认定处于同一条边缘并进行连线,得到包含提取到边缘的图像。
为了进一步优化,步骤S3中还包括步骤S33:最后对包含提取到边缘的图像进行横向求和,即横向的像素灰度求和,通过步骤S33可得到矩阵在横向上的平均值。通过横向求和并获得灰度平均值,再进行光纤定位,取图像中光纤位置的平均值,因此鲁棒性好,不易受噪声干扰。如果仅仅提取一条线上的灰度值,容易受到噪声或杂质的干扰(例如灰尘和浸镜油中的气泡)导致定位发生错误。
接着步骤S3中还包括步骤S34:根据沿光纤径向方向上存在四个灰度极大值点(波峰)和两个灰度极小值点(波谷)来定位光纤的位置,如图5所示;横向求和后再进行光纤定位相当于取图像中光纤位置的平均值,因此鲁棒性好,不易受噪声干扰。
最终根据沿光纤径向方向上的灰度呈对称分布的关系定位到光纤纤芯的上下边缘。
对步骤S4的说明如下:
在步骤S4中,偏移量计算具体方法包括:
通过偏移量计算模块24,根据步骤S3提取到的纤芯上下边缘,通过函数拟合换算出像素坐标系下的位置偏移量和聚焦偏移量;
再通过坐标转换模块,把像素坐标系中的位置偏移量和聚焦偏移量转换为世界坐标系下的位置偏移量和聚焦偏移量。
可以理解的,在步骤S4中,可根据步骤S3获得的纤芯的上下边缘,先计算纤芯的中心位置,再根据纤芯的中心位置与激光需要聚焦的光纤上的目标位置之间的关系,来计算偏移量。或者,也可以直接根据激光需要聚焦的目标位置以及步骤S3获得的纤芯的上下边缘直接计算偏移量。
偏移量计算模块24通过提取到的灰度极大值点(波峰)和灰度极小值点(波谷)的分布关系,通过拟合函数计算出在像素坐标系下的z轴、
最后,坐标转换模块将像素坐标系下的z轴、
对步骤S5的说明如下:
在步骤S5中,运动控制模块30根据求得的世界坐标系下的光纤偏移量对光纤的位置和激光聚焦位置进行补偿,从而保证每次加工都能准确对准光纤上的目标位置。
运动控制模块30包含:短程运动控制模块32,长程运动控制模块31,位置修正模块33,如图7所示。
如图2所示。短程运动控制模块32包括位移平台108、以及用于控制位移平台的第一控制器109,通过第一控制器109控制位移平台108以平移的形式移动光纤。通过光纤夹具107将光纤固定在位移平台108,位移平台108移动时带动光纤夹具107、光纤一起运动。位移平台108为精密三维位移平台,短程运动速度较慢但精度较高。
长程运动控制模块31包括光纤线轴110、驱动电机及第二控制器111,通过光纤线轴110拖动(卷入光纤)的方式移动光纤,长程运动控制模块31能驱动光纤以较快速度移动,但精度相对短程运动较低。
第一控制器109及第二控制器111均与计算机112连接。计算机112还同时连接并控制激光器101以及CCD相机105。
在步骤S5中,偏移量补偿的方法包括:
在加工前,根据偏移量调整光纤相对激光聚焦点的位置,使激光聚焦位置对准光纤上的目标位置。
在加工过程中,根据偏移量调整光纤相对激光聚焦点的位置。
在加工过程中的偏移量补偿包括对短程运动的补偿以及对长程运动的补偿。
对短程运动的补偿,通过短程运动控制模块32,在光纤的加工过程中移动光纤位置时进行补偿,确保加工的位置始终位于光纤上的目标位置。
对长程运动的补偿,通过长程运动控制模块31,用于在一段光纤加工结束后将下一段光纤移动至加工区域过程中进行补偿。
相对地,对短程运动的补偿速度较慢但精度较高,对长程运动的补偿速度较快但精度较低。直到完成全部阵列的制备。
本申请,在加工过程中通过短程运动控制模块32进行光纤的移动,速度较慢但精度较高;而在加工结束后移动至下一段光纤待加工区域时通过长程运动控制模块31进行光纤的移动,速度较快但精度较低。因此,即保证了加工速度,也保证了加工精度。
位置修正模块33,用于在整个运动过程中根据图像处理器计算得到的结果(空间坐标系下的偏移量)对光纤加工过程进行一个补偿。现有的制备方法,未使用位置修正模块,而在实际加工过程中,在制备开始前激光位置便可能偏离光纤上的目标位置如纤芯,若不进行位置修正,最终加工出来的结构性能降低,甚至无法加工到光纤上的目标位置中;由于偏移量会不断累积,若不引入位置修正便无法进行阵列的加工。
本申请的偏移量补偿的方法,加工精度更高:在每次加工前都能根据图像识别算法自动修正光纤相对激光聚焦点的偏移量,图像识别算法定位的精度达到了亚微米级别。同时在加工过程中,根据偏移量调整光纤相对激光聚焦点的位置。而现有技术很少对加工时的位置进行修正。
位置修正模块还包括路径规划模块35,如图9所示。路径规划模块35具体用于对短程运动控制模块给出的运动路径进行分段采样。
在对短程运动的补偿时,设置初始点以及结束点,沿运动轨迹分段采样,对各个分段点进行偏移量的计算得到采样处的偏移量;通过分段插值拟合计算每段的偏移量;最后根据整个过程中的偏移量对运动轨迹进行修正并规划一个新的运动轨迹。在后续开始加工后,位置修正模块将按照这个新的运动轨迹对光纤位置进行补偿,补偿每段的偏移量,从而在整个运动轨迹都能将光纤上的目标位置(例如纤芯)对准至待加工区域,最后完成加工,如图6所示。在这种场景下路径规划模块的引入可以用于制备较长的光纤微结构以及波导结构。
现有的制备方法,未使用分段采样并进行后续偏移量补偿,因此制备过程中激光位置存在偏离光纤上的目标位置的可能,导致加工出来的结构性能降低;同时在进行阵列加工的过程中各个结构的一致性难以保证, 甚至无法进行阵列的自动化制备。
进一步的,运动控制模块30还包括旋转运动控制模块34,如图8所示。旋转运动控制模块34具体用于对光纤进行旋转,以将多芯光纤不同位置的光纤上的目标位置如纤芯并对准至待加工区域。在这种场景下旋转运动控制模块34既可以是对光纤夹具进行旋转控制,例如,可通过马达驱动光纤夹具旋转;也可以是对进行加工的激光进行旋转控制。引入旋转控制模块可以避免通过改变激光聚焦位置在多芯光纤不同纤芯中进行加工时,非加工纤芯会对穿过的激光能量造成损耗的问题。
本发明具有如下有益效果:
本发明提供了一种用于激光加工的光纤自动聚焦方法及系统,与现有的光纤光栅阵列加工系统相比,具有如下优点:
加工精度高:在每次加工前都能根据图像识别算法自动修正光纤位置和激光焦点位置之间的偏移量,图像识别算法定位的精度达到了亚微米级别,而现有技术很少对加工之后的位置进行修正。
加工速度快:加工过程中通过短程运动控制模块进行光纤的移动,速度较慢但精度较高;而在加工结束后移动至下一段光纤待加工区域时通过长程运动控制模块进行光纤的移动,速度较快但精度较低。
各微结构之间一致性好:每次加工都能保证相同的焦距和位置,从而提升各微结构之间的一致性,使得阵列的自动化制备成为可能。
插损低:整个加工期间都能确保精确地在光纤上的目标位置进行加工,不会伤害到包层,从而降低插入损耗。
操作方便:加工过程中系统实现了自动化定位、自动化聚焦,不用每次加工前都手动调节光纤位置和水平。
能对不同种类光纤进行加工:光纤可以是石英光纤、塑料光纤、光子晶体光纤、多芯光纤或其他种类的光纤。
显然,以上所描述的实施例仅仅是本申请的一部分实施例,而不是全部的实施例,附图中给出了本申请的较佳实施例,但并不限制本申请的专利保护范围。本申请可以以许多不同的形式来实现,相反地,提供这些实施例的目的是使对本申请的公开内容的理解更加透彻全面。尽管参照前述实施例对本申请进行了详细的说明,对于本领域的技术人员而言,其依然可以对前述各具体实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等效替换。凡是利用本申请说明书及附图内容所做的等效结构,直接或间接运用在其他相关的技术领域,均同理在本申请专利保护范围之内。
- 用于激光加工的光纤自动聚焦方法、及自动聚焦系统
- 用于加工光纤光栅的纤芯自动聚焦方法及系统、存储介质