平视显示器系统
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及搭载于车辆并适当地校正影像的显示位置的平视显示器系统。
背景技术
近年来,经由车辆的挡风玻璃在前方将影像信息显示为虚像的车辆用影像显示装置(平视显示器(head-up display,以下记为HUD))得到实用化。此时,通过提供面向驾驶员的信息作为显示的影像信息,能够支援车辆的驾驶操作。
例如在专利文献1中,记载了与车辆振动对应的显示图像的显示位置的校正。在此,提出了如下的结构:关于强调图像(以相对实景中的特定的对象物而具有预定的位置关系的方式显示的图像)执行显示位置的校正处理,关于非强调图像(以相对对象物而不具有预定的位置关系的方式显示的图像)不执行校正处理。
现有技术文献
专利文献1:日本特开2017-13590号公报
发明内容
在上述专利文献1中,作为振动检测方法记述了“例如由3轴加速度传感器等构成”,但并未记载使用传感器检测值具体如何校正。即,根据本申请发明人等的研究,发现了如下现象:在使用陀螺仪传感器进行颠簸摇摆(旋转摇晃)的校正的情况下,在弯道行驶时显示影像(目标)向与颠簸摇摆无关的方向移动。这对驾驶员造成不协调感,所以需要避免。另外,在高精度地进行校正处理的情况下,不仅是颠簸摇摆,而且包括上下方向的摇摆分量(移位摇晃)在内需要进行校正。此时,作为类似技术已知例如照相机的手抖动校正方法,但无法直接应用,必须考虑驾驶员的视点位置来校正。
本发明的目的在于,提供一种针对车辆的振动不会对驾驶员造成不协调感而适当地校正影像的显示位置的平视显示器系统。
在本发明的平视显示器系统中,为了检测车辆的振动而设置陀螺仪传感器。影像数据生成部根据由陀螺仪传感器取得的2轴方向的角速度信息,进行显示的目标的显示位置的颠簸校正。在车辆以倾斜的状态进行弯道行驶的情况下,关于在影像显示范围内的固定位置显示的始终显示目标,抑制或者中止颠簸校正。关于重叠于由前方感测装置检测到的特定的物体而显示的实景重叠目标,使显示的亮度变暗或者消失。
另外,在本发明的平视显示器系统中,为了检测旋转摇晃和移位摇晃作为车辆的振动分量,设置陀螺仪传感器和加速度传感器。影像数据生成部根据由陀螺仪传感器取得的角速度信息以及由加速度传感器取得的加速度信息,进行显示的目标的显示位置的校正。求出视为由于车辆的旋转摇晃而产生加速度传感器中的铅直变位时的旋转半径,根据由视点检测装置检测到的驾驶员的视点位置的信息,计算驾驶员的位置处的所述车辆的旋转摇晃和移位摇晃,进行目标的显示位置的校正。
根据本发明,能够提供针对车辆的振动不会对驾驶员造成不协调感而适当地校正影像的显示位置的平视显示器系统。
附图说明
图1是示出搭载于车辆的HUD系统1的概要的图。
图2A是示出HUD系统1的整体结构的框图。
图2B是示出HUD装置10的内部结构的框图。
图2C是示出视点检测装置20的内部结构的框图。
图2D是示出前方感测装置30的内部结构的框图。
图3是对显示的影像数据的种类进行说明的图。
图4A是示出车辆的振动的图。
图4B是示出与车辆的振动相伴的显示影像的摇摆的图。
图5A是示出颠簸摇摆的测定的图(实施例1)。
图5B是示出与颠簸摇摆相伴的显示位置的移动的图。
图5C是示出显示位置的校正的图。
图6是说明弯道行驶时的影像显示例的图。
图7A是说明车辆的3轴方向的旋转的图。
图7B是示出以车体未倾斜的状态在弯道转弯的情况的图。
图7C是示出以车体倾斜的状态在弯道转弯的情况的图。
图8A是说明利用处置方法1进行的始终显示目标的校正的图。
图8B是说明利用处置方法1进行的实景重叠目标的校正的图。
图8C是示出在处置方法1中使用的校正函数(衰减项)的图。
图9是示出利用处置方法1进行校正后的显示例的图。
图10是说明使实景重叠目标消失的效果的图。
图11是示出处置方法1的流程图的图。
图12是示出处置方法2的流程图的图。
图13A是示出2个振动分量(旋转摇晃)的图(实施例2)。
图13B是示出2个振动分量(移位摇晃)的图(实施例2)。
图14A是说明校正计算(支点S为车辆的后方)的图。
图14B是说明校正计算(支点S为车辆的前方)的图。
图15是示出传感器与驾驶员之间的距离L的测定方法的图。
图16是示出流程图的图。
图17是说明变形例中的校正计算的图。
图18是示出驾驶员的铅直变位hd的测定方法的图。
(符号说明)
1:平视显示器(HUD)系统;2:车辆;3:风挡(windshield);5、5’:驾驶员(驾驶员的眼睛);8:虚像;10:HUD装置;11、21、31:控制部;20:视点检测装置;30:前方感测装置;42:加速度传感器;43:陀螺仪传感器;51:影像显示装置;80:影像显示范围;81、82:显示目标;132:影像数据生成部。
具体实施方式
使用附图,说明本发明所涉及的平视显示器系统(以下记为HUD系统)的实施方式。
图1是示出搭载于车辆的HUD系统1的概要的图。HUD系统1包括:HUD装置10,是影像显示功能的主体部;视点检测装置20,检测驾驶员的视点位置;以及前方感测装置30,检测车辆的前方的物体。
HUD装置10搭载于车辆2的仪表盘的下部,将由影像显示装置生成的影像经由镜(mirror)而投射到车辆2的挡风玻璃3(也称为风挡)。由风挡3反射的影像入射到驾驶员的眼睛5’,驾驶员能够看到影像。此时,驾驶员会观察在风挡3的前方存在的虚像8。HUD装置10内的镜驱动部53根据驾驶员的眼睛5’的高度(A、B、C)而使镜52绕轴旋转,调整虚像8的显示位置(高度方向)。通过该调整,驾驶员能够在易于观察的位置看到虚像8。
视点检测装置20例如设置于仪表盘上,测定驾驶员的眼睛5’的位置(距离和高度)。视点检测装置20被用于驾驶员监视系统(DMS)。前方感测装置30例如设置于风挡3的上部,检测车辆2的前方的物体(特定的对象物),测定直至物体为止的距离。HUD装置10根据视点检测装置20和前方感测装置30的检测信息,决定应显示的影像并且显示于驾驶员易于观察的位置。此外,将驾驶员看到的虚像8还简称为“影像8”。
图2A是示出HUD系统1的整体结构的框图。HUD系统1包括HUD装置10、视点检测装置20以及前方感测装置30。图2B~图2D示出各个装置的内部结构。各装置10、20、30具有包括信息取得部、CPU、存储器、接口的控制部(ECU:Electronic Control Unit,电子控制单元)11、21、31。另外,各装置10、20、30经由CAN(Controller Area Network,控制器局域网)等通信总线61而与车辆ECU60连接。
图2B是示出HUD装置10的内部结构的框图。信息取得部12取得来自安装于车辆的各种传感器的车辆信息。作为传感器,具备取得车辆2的速度信息的车速传感器41、取得加速度信息作为车辆2的振动、摇摆的状态的加速度传感器42、取得角速度信息(陀螺仪信息)的陀螺仪传感器43。另外,为了生成表示车辆2的位置、行进方向的地图信息,具备取得GPS(Global Positioning System:全球定位系统)信号的GPS接收机44、接收VICS(VehicleInformation and Communication System(车辆信息通信系统):道路交通信息通信系统,日本注册商标(以下同样))信号的VICS接收机45。此外,安装有未图示的引擎起动传感器、方向盘操舵角传感器、温度传感器、照度传感器等各种传感器。
HUD装置10的CPU13具有影像数据生成部132、声音数据生成部131,根据所输入的车辆信息而生成向驾驶员提供的影像数据、声音数据。存储器14储存CPU13执行的程序、各种控制数据,并且存储显示的影像数据。经由声音用接口15从扬声器54输出声音数据生成部131生成的声音数据。经由显示用接口16通过影像显示部50来显示影像数据生成部132生成的影像数据。影像显示部50具有:影像显示装置51,通过LED或激光器等光源、照明光学系统、液晶元件等显示元件来生成影像光;以及镜52,朝向风挡3射出生成的影像光。CPU13内的镜调整部133经由镜驱动部53来调整镜52的旋转。通信部134经由通信用接口17连接于通信总线61,与视点检测装置20、前方感测装置30之间进行检测数据、控制数据的发送接收。
图2C是示出视点检测装置20的内部结构的框图。信息取得部22通过安装于车辆的距离检测器46来取得直至驾驶员的视点位置为止的距离信息,并传送给CPU24。在距离检测器46中例如使用TOF(Time of Flight,飞行时间)传感器等。另外,由车内照相机47对车内的图像进行摄影,并经由照相机用接口23传送给CPU24,通过影像解析部241来检测驾驶员的视点。存储器25储存CPU24执行的程序,并且存储检测信息。通信部242经由通信用接口26将驾驶员的距离信息、视点信息发送给HUD装置10。
图2D是示出前方感测装置30的内部结构的框图。信息取得部32利用安装于车辆的距离检测器48取得直至车辆前方的物体(车辆、标识、行人等)为止的距离信息,并传送给CPU34。在距离检测器48中例如使用TOF(Time of Flight)传感器等。另外,由车外照相机49对前方的图像进行摄影,并经由照相机用接口33传送给CPU34,通过影像解析部341来检测物体。存储器35储存CPU34执行的程序,并且存储检测信息。通信部342经由通信用接口36将前方物体的距离信息、检测信息发送给HUD装置10。
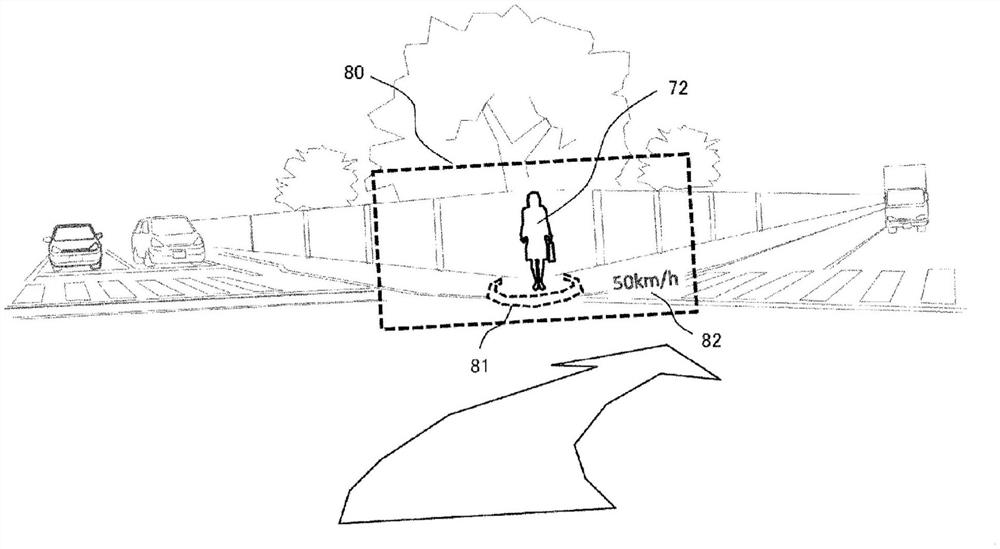
图3是对显示的影像数据的种类进行说明的图。在图3中,示出从驾驶席观察的车辆前方的实景70,在其中存在前方行驶的车辆71。虚线框80表示HUD装置10的影像显示范围,显示出2种目标。
实景重叠目标81是与处于实景的特定的物体(车辆、人、标识等)重叠地显示的目标。在此,显示有用于提醒注意前方车辆的警告(环)。作为其它的实景重叠目标81,将路径信息、白线/路肩、店铺信息(弹出信息)等与行驶路、建筑物等重叠地显示。
始终显示目标82是不与实景重叠而在影像显示范围80内的固定位置显示的目标。在此,将速度信息显示于影像显示范围80的右下位置。作为其它的始终显示目标82,将剩余燃料、气温、目的地信息等显示于各自的固定位置。
此外,由HUD装置10的影像数据生成部132使用3D描绘库来生成要显示的目标的影像数据,并且设定其显示位置。在显示实景重叠目标81的情况下,由前方感测装置30探测在实景70中存在的物体(车辆、人、标识等),计算其位置。然后,影像数据生成部132以与探测到的物体重叠的方式描绘目标。
图4A和图4B是说明与车辆的振动相伴的显示影像的摇摆的图。如果如图4A所示由于路面的凹凸等而车辆2向箭头方向振动,则与其相应地,驾驶员观看的影像8也摇摆。摇摆的方向取决于车辆2的上下振动。
图4B示出从车内观察的显示影像的摇摆。由于以车辆为基准来设定HUD装置10的影像显示范围80,所以如果车辆摇摆则影像显示范围80也上下变动,与其相伴地,所显示的目标81、82的位置也上下变动。目标的摇摆不仅会给驾驶员带来不适感,而且实景重叠目标81偏离实景70内的物体(例如车辆71)而被显示,所以不能令人满意。此外,实景重叠目标81本来与前方物体重叠地显示,但在前方感测装置30的物体检测性能无法追踪车辆的摇摆的速度的情况下,难以使目标重叠地显示。
以下,区分情况来说明针对车辆的振动(摇摆)的显示影像的校正方法。在实施例1中将颠簸摇摆(旋转分量)作为对象,在实施例2中将颠簸摇摆和移位摇摆(平行移动分量)作为对象。
实施例1
在实施例1中,说明将颠簸摇摆(旋转分量)作为校正对象并使用陀螺仪传感器进行校正处理的情况。
图5A~图5C是说明使用陀螺仪传感器的颠簸校正的基本动作的图。
图5A是示出颠簸摇摆的测定的图。利用设置于车辆2的陀螺仪传感器43,测定绕y轴的旋转速度、即颠簸方向(纵摇方向)的角速度ωpitch。CPU13对角速度ωpitch进行积分,求出角度变化量(纵摇角度)θpitch。
图5B是示出与颠簸摇摆相伴的显示位置的移动的图。驾驶员5观察的影像显示范围80根据纵摇角度θpitch而向上方向移动Δz(A位置→B位置)。与此相伴,驾驶员5观察的目标81、82的显示位置也向上方向移动Δz。
图5C是示出由影像数据生成部132进行的显示位置的校正的图。在B位置,使影像显示范围80内的目标81、82的显示位置向下方移位Δz。由此,使驾驶员5观察的目标的显示位置不变化。即,根据纵摇角度θpitch使目标的显示位置挪动,从而抑制与车辆振动相伴的目标的摇摆。
在此,本发明人等发现了在弯道行驶时影像显示范围向与颠簸摇摆无关的方向移动的现象。
图6是说明弯道行驶时的影像显示例的图。在该例子中,示出车辆在交叉点右转时车体向左方向倾斜地行驶的情况。在影像显示范围80中,与前方的行人72重叠地显示有目标81。但是,尽管路面平坦且车辆没有上下摇摆,但从本来希望显示的位置81’向上方向偏移地显示,所以变成不易观察的显示。
研究这个现象。如果在交叉点或弯道处车体以向左右方向倾斜的状态转弯,则由于后述的理由,陀螺仪传感器43检测出表观上的纵摇分量。认为原因在于,HUD装置的控制部11为了校正该纵摇分量而在上下方向上挪动显示的目标。
图7A~图7C是说明发生表观上的纵摇分量的理由的图。
首先,如图7A所示,如下那样定义车辆的3轴方向的旋转。在将车辆2的行进方向设为x轴、将左右方向设为y轴、将上下(铅直)方向设为z轴时,将绕x轴的旋转称为翻滚方向(roll direction),将绕y轴的旋转称为纵摇方向(pitch direction),将绕z轴的旋转称为横摆方向(yaw direction)。在此,考虑车辆2向左方向转弯的情况。
图7B示出以车体未倾斜的状态在弯道转弯的情况。在该情况下,在陀螺仪传感器43中仅检测横摆方向的角速度ω。
图7C示出以车体倾斜的状态在弯道转弯的情况。相对铅直轴,在翻滚方向上提供倾角θroll。此时,在陀螺仪传感器43中将车辆的3轴方向作为基准来检测角速度,所以不仅发生横摆方向的角速度ωyaw,而且还发生纵摇方向的角速度ωpitch。
纵摇方向的角速度ωpitch成为(1-1)式,出现ωpitch的分量。
ωpitch=ω·sinθroll (1-1)
另外,横摆方向的角速度ωyaw成为(1-2)式。
ωyaw=ω·cosθroll (1-2)
根据(1-1)式、(1-2)式,得到(1-3)式。
ωpitch=ωyaw·tanθroll (1-3)
这样,在陀螺仪传感器中,不仅检测横摆方向的角速度ωyaw,而且检测由翻滚方向的倾角θroll决定的纵摇方向的角速度ωpitch。其结果,HUD装置的控制部11为了校正该纵摇分量ωpitch而在上下方向上挪动显示的目标。
为了避免上述弯道行驶时的不需要的显示校正,实施以下叙述的[处置方法1]或者[处置方法2]。
[处置方法1]
在处置方法1中,将校正对象划分为始终显示目标和实景重叠目标,进行校正量的修正或者显示亮度的变更。
图8A~图8C是说明处置方法1中的目标的校正的图。首先,从图8A的始终显示目标82的校正开始说明。
在由陀螺仪传感器43检测到的纵摇角度是θpitch时,关于始终显示目标,使用(2)式将在校正中使用的纵摇角度修正为θc。
θc=θpitch·(1+exp(a(ωyaw+ω0)))
=θpitch·G (2)
在此,(2)式的衰减项G是图8C所示的校正函数,是在横摆方向的角速度|ωyaw|小于阈值ω0的情况下G=1、并在|ωyaw|大于阈值ω0的情况下渐进到G=0的函数。在此,通过调整衰减项G内的系数a,能够在G=1与G=0之间平滑地迁移。此外,函数G不限于上述式,只要是以阈值ω0为边界而在G=1与G=0之间平滑地迁移的函数即可。
在图8A中,示出使用(2)式的校正的例子。在横摆方向的角速度ωyaw小的情况下,将检测到的纵摇角度θpitch直接用作校正用的纵摇角度θc,但在横摆方向的角速度ωyaw大的情况下,使校正用的纵摇角度θc接近0。即,在车辆在弯道处想要急转弯的情况下,即便通过陀螺仪传感器检测到纵摇角度θpitch,也抑制或者中止目标的显示位置的校正。
接下来,说明图8B的实景重叠目标81的校正。实景重叠目标的显示位置与实景内的物体重叠,所以与由陀螺仪传感器43检测到的纵摇角度θpitch无关。取而代之,根据由陀螺仪传感器43检测到的横摆方向的角速度ωyaw,变更实景重叠目标的显示的亮度。
在将目标的变更前的亮度设为P时,用(3)式来修正变更后的亮度Pc。
Pc=P·(1+exp(a(ωyaw+ω0)))
=P·G (3)
在此,(3)式的衰减项G是与所述(2)式的衰减项G相同的函数,在横摆方向的角速度|ωyaw|小于阈值ω0的情况下G=1,在|ωyaw|大于阈值ω0的情况下渐进到G=0。
在图8B中,示出使用(3)式的校正的例子。在横摆方向的角速度ωyaw小的情况下,目标的显示的亮度Pc成为本来的亮度P,但在横摆方向的角速度ωyaw大的情况下,使显示的亮度Pc接近0。即,在横摆方向的角速度大的情况下,使目标显示变暗或者消失。这是因为,在车辆在弯道处想要急转弯的情况下,实景的应重叠的物体向左右方向移动的可能性高,因此认为恰当的做法是中止目标的重叠显示自身。
图9是示出利用处置方法1进行校正后的显示例的图。在横摆方向的角速度ωyaw大于阈值ω0的情况下,始终显示目标82(速度显示等)不会根据颠簸摇摆来移动而是成为固定显示。另一方面,关于实景重叠目标81(警告等),将亮度变更为接近0的值,使显示中止(消失)。
图10是说明使实景重叠目标消失的效果的图。示出从驾驶席看到的车外的风景。在弯道或交叉点处急剧改变车体的朝向的过程中,驾驶员并非注视车辆的前方73,而是注视行进方向74。在该过程中,如果在影像显示范围80中显示动态的目标(警告等)81,则驾驶员会分心,成为分神状态而危险。另外,在前方感测装置30的检测速度性能低的情况下,无法应对车体的朝向的急剧变化,有可能由于检测延迟而在与对象物不同的部位显示警告81。因此,在使朝向急剧变化的情况下,通过使实景重叠目标81消失,能够避免这个问题。
图11是示出处置方法1的流程图的图。HUD装置的控制部11通过以下的流程来执行校正处理。
S101:从陀螺仪传感器43取得横摆方向和纵摇方向的角速度(ωyaw、ωpitch)。
S102:关于纵摇方向的角速度ωpitch,实施滤波处理。具体而言,利用HPF来去除偏移量,利用LPF来去除高频噪声。
S103:对滤波处理后的ωpitch进行积分,计算纵摇角度θpitch。进而乘以一定的衰减系数,防止发散。
S104:用所述(2)式来修正纵摇角度θpitch,计算θc。即,在横摆方向的角速度|ωyaw|大于阈值ω0的情况下,使纵摇角度θc接近0。
S105:用所述(3)式来修正目标的亮度P,计算Pc。即,在横摆方向的角速度|ωyaw|大于阈值ω0的情况下,使目标的亮度Pc接近0。
S106:影像数据生成部132根据修正后的纵摇角度θc,使始终显示目标的位置移动。
S107:根据修正后的亮度Pc,变更实景重叠目标的亮度。实施这些校正后的目标被影像显示部50显示。
S108:判定影像的显示是否结束,在继续的情况下返回到S101,重复上述处理。
[处置方法2]
接下来,作为处置方法1的变形例,说明处置方法2。在处置方法2中,用陀螺仪传感器43测定3轴方向的角速度,还考虑角速度的翻滚分量ωroll来计算实质的颠簸角度θc’。针对由陀螺仪传感器43测定出的角速度的纵摇分量ωpitch、横摆分量ωyaw、翻滚分量ωroll,关于翻滚分量ωroll进行时间积分而设为翻滚角度θroll。
在颠簸校正中使用的角速度ωc’根据以下的式来求出。
ωc’=ωpitch-ωyaw·tanθroll (4)
通过(4)式得到的角速度ωc’考虑了横摆分量ωyaw和翻滚角度θroll的影响,所以成为实质的纵摇分量。
对上述ωc’进行时间积分,求出实质的纵摇角度θc’。根据该θc’来改变显示目标的位置,从而进行校正。在该情况下,关于实景重叠目标,也不进行亮度的变更(消失),而与始终显示目标同样地处理。
图12是示出处置方法2的流程图的图。
S111:从陀螺仪传感器43取得翻滚方向、横摆方向以及纵摇方向的角速度(ωroll、ωyaw、ωpitch)。
S112:关于各方向的角速度(ωroll、ωyaw、ωpitch)实施滤波处理。具体而言,用HPF来去除偏移量,用LPF来去除高频噪声。
S113:对滤波处理后的ωroll进行积分,计算翻滚角度θroll。进而乘以一定的衰减系数,防止发散。
S114:根据所述(4)式来计算角速度ωc’。此时,调整ωpitch、ωyaw、θroll的相位。
S115:对角速度ωc’进行时间积分,计算实质的纵摇角度θc’。进而乘以一定的衰减系数,防止发散。
S116:影像数据生成部132根据纵摇角度θc’,使始终显示目标以及实景重叠目标的位置移动。
S117:判定影像的显示是否结束,在继续的情况下返回到S111,重复上述处理。
比较处置方法1和处置方法2。在处置方法1中无需考虑翻滚方向,所以能够利用2轴陀螺仪传感器来实施。在执行处置方法1的情况下,用户能够结合喜好而自由地变更阈值ω0和系数a。在处置方法2中需要3轴陀螺仪传感器,但根据实质的颠簸角度,始终对目标进行显示。
在HUD装置10安装有3轴陀螺仪传感器的情况下,构成为用户能够选择处置方法1和处置方法2。另外,也可以根据实景重叠目标的种类来分配处置方法1和处置方法2。例如,在是包含店铺信息等文字的弹出信息目标的情况下,用户会注视而危险,所以分配处置方法1,在是不包含文字的目标的情况下,分配处置方法2为宜。
根据实施例1,能够避免车辆在弯道行驶时显示目标向与颠簸摇摆无关的方向移动的现象。由此,在车辆进行急剧的方向转换时避免驾驶员成为分神状态,具有对安全驾驶的维持作出贡献的效果。
实施例2
在实施例1中,作为车辆的振动的校正对象,处置颠簸摇摆,但在车辆的振动中存在旋转分量和平行移动分量。在实施例2中,处置两者的分量。为此,使用陀螺仪传感器43和加速度传感器42作为车辆的摇摆传感器。
图13A和图13B是示出作为校正对象的2个振动分量的图。图13A示出旋转分量,用颠簸角度θpitch来表示,称为“旋转摇晃”。图13B示出上下方向的平行移动分量,用变位h表示,称为“移位摇晃”。均为目标的显示位置在上下方向上偏移的要因。
由于将它们作为校正对象,因此使用陀螺仪传感器43和加速度传感器42,应用照相机的手抖动校正的技术。但是,在照相机的手抖动校正中,求出摄像面中的摇晃,但由于传感器和摄像面的位置关系是固定的,所以无需考虑驾驶员的位置。相对于此,在实施例2的情况下,需要求出驾驶员的位置(视点)处的摇晃。此时,驾驶员的位置根据身高、姿势而不同,所以使用视点检测装置20实时地测定。
图14A和图14B是说明实施例2中的校正计算的图。陀螺仪传感器43和加速度传感器42(合起来也称为陀螺仪/加速度传感器)设置于驾驶员5的前方。在此,示出2个摇摆状态,图14A是旋转摇晃的支点S处于车辆的后方的情况,图14B是支点S处于车辆的前方的情况。为了处置车辆的旋转摇晃和移位摇晃这两方,在校正计算中使用的参数如以下那样。
对从陀螺仪传感器43求出的角速度的纵摇分量ωpitch进行积分,计算纵摇角度θpitch。将陀螺仪/加速度传感器43、42与驾驶员5之间的距离设为L。将陀螺仪/加速度传感器43、42位置处的铅直变位设为hg。将驾驶员5位置处的铅直变位设为hd。将视为由于旋转摇晃而产生hg的情况下的旋转半径设为R。在校正计算中,求出与旋转摇晃量对应的纵摇角度θpitch以及与移位摇晃量对应的驾驶员5位置处的变位hd。
在各参数之间,下面的关系式成立。
hg=R·θpitch(其中,θpitch<<1) (5-1)
dhg/dt(=Vz)=R·(dθpitch/dt) (5-2)
d
根据(5-2)式或者(5-3)式求出旋转半径R,通过代入到(5-1)式来求出hg。
在使用(5-2)式的情况下,速度dhg/dt是通过滤波处理(HPF等)从加速度传感器42的z分量(αz)中去除重力加速度并进行时间积分而得到的值(设为Vz)。dθpitch/dt是陀螺仪传感器43的纵摇分量(ωpitch)。
在使用(5-3)式的情况下,加速度d
图15是示出陀螺仪/加速度传感器43、42与驾驶员5之间的距离L的测定方法的图。距离L根据驾驶员5的身高、姿势而不同,所以使用视点检测装置20的测距功能(距离检测器46)实时地测定。在该图中,测定针对驾驶员5a、5b的距离La、Lb。
在根据以上而求出各参数hg、R、L的值时,通过(5-4)式来计算驾驶员5的位置处的铅直变位hd。
hd=hg·(R-L)/R (5-4)
在目标的显示位置的校正中,根据作为旋转摇晃量的θpitch和作为移位摇晃量的hd,挪动并显示目标位置。
图16是示出实施例2的流程图的图。
S201:从陀螺仪传感器43取得3轴方向的角速度(ωroll、ωyaw、ωpitch)。
S202:对纵摇分量ωpitch进行滤波处理(用HPF来去除偏移量,用LPF来去除高频噪声),对滤波处理后的ωpitch进行积分,计算纵摇角度θpitch(乘以衰减系数,防止发散)。
S203:对滤波处理后的ωpitch进行微分,计算dωpitch/dt。
S204:从加速度传感器42取得3轴方向的加速度(αx、αy、αz)。
S205:对铅直分量的加速度αz进行滤波处理(用HPF来去除重力加速度,用LPF来去除高频噪声),进而进行积分来计算铅直方向的速度Vz(乘以衰减系数,防止发散)。
S206:使用在上述中求出的αz、Vz、ωpitch、dωpitch/dt,计算旋转半径R和传感器的铅直变位hg。此时,根据(5-2)式或者(5-3)式来计算R,根据(5-1)式来计算hg。
S207:用视点检测装置20来测定陀螺仪/加速度传感器43、42与驾驶员5之间的距离L。
S208:使用在上述中求出的R、hg、L,根据(5-4)式来计算驾驶员5的铅直变位hd。
S209:根据旋转摇晃量θpitch和移位摇晃量hd,变更目标的显示位置。
S210:判定显示是否结束,在继续的情况下返回到S201,重复上述处理。
在此,在实施例2中能够实现以下的变形例。在变形例中,设置陀螺仪传感器43和2个加速度传感器42,用其它方法来求出旋转半径。
图17是说明变形例中的校正计算的图。在车辆的前后位置分别安装加速度传感器42a和42b。将2个加速度传感器42a、42b之间的距离设为D(固定)。将从陀螺仪传感器43求出的纵摇角度设为θpitch。将前方的加速度传感器42a的位置处的铅直变位设为hga,将后方的加速度传感器42b的位置处的铅直变位设为hgb。在设为与旋转摇晃对应的支点S时,将针对变位hga的旋转半径设为Ra,将针对变位hgb的旋转半径设为Rb。
各参数的关系用以下的式来表示。
hga=Ra·θpitch(其中,θpitch<<1) (6-1a)
hgb=Rb·θpitch(其中,θpitch<<1) (6-1b)
dhga/dt=Ra·(dθpitch/dt) (6-2a)
dhgb/dt=Rb·(dθpitch/dt) (6-2b)
d
d
Ra-Rb=D (6-4)
根据(6-2a)式、(6-2b)式或者(6-3a)式、(6-3b)式来求出旋转半径Ra、Rb。
首先,在使用(6-2a)式、(6-2b)式的情况下如下。
(dhga/dt)/Ra=(dhgb/dt)/Rb (6-5)
在此,如果速度分量为(dhga/dt)=Va、(dhgb/dt)=Vb,则从(6-4)式、(6-5)式成为(6-6a)式、(6-6b)式,求出旋转半径Ra、Rb。
Ra=D·Va/(Va-Vb) (6-6a)
Rb=D·Vb/(Va-Vb) (6-6b)
另一方面,在使用(6-3a)式、(6-3b)式的情况下如下。
(d
在此,如果加速度分量为(d
Ra=D·αa/(αa-αb) (6-8a)
Rb=D·αb/(αa-αb) (6-8b)
此外,关于旋转半径Ra、Rb的符号,由加速度传感器42a、42b和支点S的位置关系来决定正负。根据(6-1a)式、(6-1b)式,如果θpitch和变位hgx(x:a,b)的极性(方向)相同则Rx(x:a,b)为正,如果不同则为负。在图17的情况下,Ra、Rb都是正的值。
图18是示出驾驶员的铅直变位hd的测定方法的图。使用视点检测装置20的测距功能(距离检测器46),测定前方的加速度传感器42a和驾驶员5间的距离L。
在根据以上求出各参数hga、Ra、L的值时,通过(6-9)式来计算驾驶员5的位置处的铅直变位hd。
hd=hga·(Ra-L)/Ra (6-9)
在目标的校正中,根据旋转摇晃量θpitch和移位摇晃量hd,挪动并显示目标位置。根据上述变形例,无需每当求出旋转半径R时使用陀螺仪传感器43的值。
根据实施例2,作为车辆的振动,检测旋转摇晃和移位摇晃这两方,并且考虑驾驶员的视点位置,从而能够高精度地校正显示目标的显示位置。
- 平视显示器、平视显示器系统、移动体以及平视显示器的设计方法
- 用于运行平视显示器系统的方法、平视显示器系统