一种电动汽车无线精准充电系统和方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及无线充电技术领域,具体涉及一种电动汽车无线精准充电系统和方法。
背景技术
传统的充电桩自动化水平低且存在许多的安全隐患;比如:现有的无线充电方式不太成熟,存在原边线圈和副边线圈对接不精准的情况,会引起一定的安全隐患且充电效率不高;电动汽车无线充电系统线圈之间发生较大偏移及整流电路工作在断续导通模式时,会带来高频传导干扰;传导电磁干扰的存在也会大大降低无线充电效率。因此,行业内急需研发一种原边线圈和副边线圈对接精准、无线充电效率高的电动汽车无线充电系统或者方法。
发明内容
本发明的目的是为了克服以上现有技术存在的不足,提供了一种电动汽车无线精准充电系统和方法,以解决对接不精准、无线充电效率不高的问题,使得电动汽车副边与地端原边能够自动精准对接,提高了无线充电效率。
本发明的目的通过以下的技术方案实现:
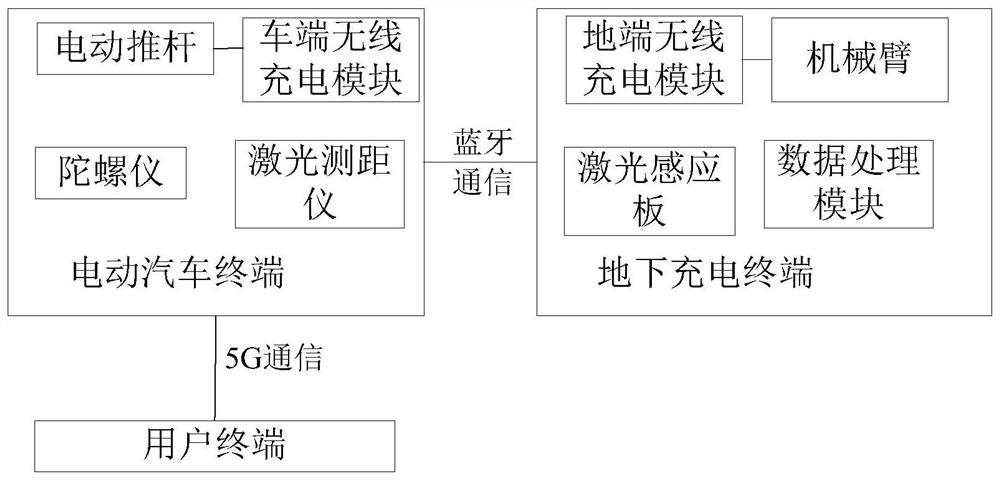
一种电动汽车无线精准充电系统,包括:电动汽车终端、地下充电终端和用于向电动汽车终端发送充电指令的用户终端;电动汽车终端和地下充电终端、用户终端均无线连接;电动汽车终端包括:角度距离测量模块、车端无线充电模块、电动推杆和储能电池;车端无线充电模块作为副边,车端无线充电模块安装在电动推杆的末端;车端无线充电模块和储能电池连接;地下充电终端包括:激光感应板、机械臂、数据处理模块和用于给电动汽车的储能电池充电的地端无线充电模块;地端无线充电模块作为原边,地端无线充电模块安装在机械臂的末端;角度距离测量模块,用于测量出车端无线充电模块到激光感应板的距离和电动推杆下降后的车端无线充电模块的位置信息;电动推杆,用于控制车端无线充电模块上升或者下降;数据处理模块,用于对位置信息和激光感应板检测的副边线圈中心的基准坐标进行处理,得到副边最佳充电位置;机械臂,用于根据副边最佳充电位置驱动地端无线充电模块的移动,使得车端无线充电模块和地端无线充电模块达到精准对接。
优选地,角度距离测量模块包括陀螺仪和激光测距仪;陀螺仪,用于测量副边在三个维度上的角度;激光测距仪,用于测量副边到激光感应板的距离、电动推杆下降后的副边到原边线圈的距离。
优选地,激光感应板包括光感矩阵组、编码器、译码器和复合板;光感矩阵组包括64个光电探测器,光电探测器和编码器、译码器均连接,复合板包括层叠设置的透光板与承重板,其中光电探测器均匀封装在透光板;激光感应板,用于检测副边线圈中心的基准坐标。
优选地,机械臂为六自由度机械臂,六自由度机械臂包括舵机和防堵转模块。
一种电动汽车无线精准充电方法,包括:
S1:用户将电动汽车车停在预设充电位置,用户通过用户终端发出充电指令至电动汽车终端;
S2:角度距离测量模块发出激光至地下充电终端的激光感应板,测量出车端无线充电模块到激光感应板的距离;
S3:闭环控制系统根据车端无线充电模块到激光感应板的距离控制电动推杆下降,电动推杆下降带动车端无线充电模块下降;电动推杆下降后,角度距离测量模块测量出车端无线充电模块的位置信息,并将位置信息发送到地下充电终端,同时激光感应板检测副边线圈中心的基准坐标;
S4:地下充电终端根据车端无线充电模块的位置信息和激光感应板检测的副边线圈中心的基准坐标,得到副边最佳充电位置;
S5:机械臂驱动地端无线充电模块到达副边最佳充电位置,开始充电,充电过程中实时监测是否存在安全隐患,充满后自动断电。
优选地,步骤S2包括激光测距仪发出激光至地下充电终端的激光感应板,测量副边到激光感应板的距离,陀螺仪测量副边在三个维度上的角度;步骤S3包括,电动推杆下降后,激光测距仪测量此时车端副边到地端原边的距离,结合陀螺仪测量副边在三个维度上的角度得到车端无线充电模块的位置信息。
优选地,步骤S4包括:根据激光测距仪、陀螺仪与激光感应板收集到的数据信息,初步定位原边线圈中心的坐标范围为(X+a,Y+b,Z+c),其中a,b,c为偏角移差,X、Y、Z分别为以感应板为XOY面建立的直角坐标系三个坐标轴;
根据陀螺仪测量的副边在三个维度上的角度计算出偏角移差,得到激光测距仪发出的激光射入到激光感应板的位置;
将双层介质以及空气的方向修正量设为δ,从感应板向下方的偏角为(θ+δ);则原边放置角度为
其中ΔP为经过两层介质的磁损耗,J、K分别为ΔX与θ的成分系数;初始条件下,ΔX=0,θ为已知角度;
初始磁损耗为
对上述方程组求解,解出修正量δ与间隙距离ΔX;
数据处理模块对得到的修正量δ与间隙距离ΔX进行处理,得到副边最佳充电位置。
优选地,根据陀螺仪测量的副边在三个维度上的角度计算出偏角移差的公式为:
c=LsinΩ;
本发明相对于现有技术具有如下优点:
本发明的原边线圈连接到电源并且通过电源进行供电;车端副边线圈安装在电动推杆上,接到充电指令后,电动推杆通过闭环控制系统下降到合适位置,激光测距仪和陀螺仪获取副边线圈的位置信息,通过蓝牙将位置信息发送到地端,地端信号处理模块结合副边线圈的位置信息和激光感应板传回数据,计算得出最佳充电位置,机械臂根据最佳充电位置驱动原边线圈到达指定位置。本发明能够使车端副边和地端原边自动精准对接后进行无线充电,有效提高了电动汽车无线充电的效率,更能符合无线充电领域自动化与智能化的发展趋势和市场需求。
本发明利用激光测距仪、激光感应定位板和陀螺仪,在精准定位系统的控制下,配合各种传感器,实现精准定位,极大的提高了电动汽车无线充电效率。且考虑了传导电磁干扰对无线充电的影响,地下充电终端根据车端无线充电模块的位置信息和激光感应板检测的副边线圈中心的基准坐标的过程中,提出矫正算法,通过多次自动校正,改变地端无线充电模块的位置,寻找最佳充电位置,实现精准对接。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为本实施例的电动汽车无线精准充电系统的整体结构示意图。
图2为本实施例的车端结构示意图。
图3为本实施例的激光感应板的结构示意图。
图4为本实施例的电动汽车无线精准充电方法的流程示意图。
图5为本实施例的激光感应板检测副边线圈中心的基准坐标的示意图;
具体实施方式
下面结合附图和实施例对本发明作进一步说明。
参见图1-3,一种电动汽车无线精准充电系统,包括:电动汽车终端、地下充电终端和用于向电动汽车终端发送充电指令的用户终端;电动汽车终端和地下充电终端、用户终端均无线蓝牙连接;
电动汽车终端包括:角度距离测量模块2、车端无线充电模块、电动推杆1和储能电池3;车端无线充电模块作为副边,车端无线充电模块安装在电动推杆1的末端;车端无线充电模块和储能电池3连接;4为能量转换与控制装置。
地下充电终端包括:激光感应板、机械臂、数据处理模块和用于给电动汽车的储能电池3充电的地端无线充电模块;地端无线充电模块作为原边,,地端无线充电模块安装在机械臂的末端;激光感应板包括光感矩阵组、编码器、译码器和复合板;光感矩阵组包括64个光电探测器,光电探测器和编码器、译码器均连接,复合板包括层叠设置的透光板与承重板,承重板是非磁性板。其中光电探测器均匀封装在透光板;激光感应板,用于检测副边线圈中心的基准坐标。其中,编码器用于接收光电感应矩阵组传回的高低电平信号,将其编译为十六进制数,再通过相应电路使得副边线圈定位坐标化。
角度距离测量模块2,用于测量出车端无线充电模块到激光感应板的距离和电动推杆1下降后的车端无线充电模块的位置信息;角度距离测量模块2包括陀螺仪和激光测距仪;陀螺仪,用于测量副边在三个维度上的角度;激光测距仪,用于测量副边到激光感应板的距离、电动推杆1下降后的副边到原边线圈的距离。车端副边到激光感应板的距离作为电动推杆1下降距离的参照;电动推杆1下降到合适的位置后,测量此时车端副边到地端原边的距离,并结合陀螺仪得到的角度确定车端原边线圈坐标化的位置;电动推杆1,用于控制车端无线充电模块上升或者下降;数据处理模块,用于对位置信息和激光感应板检测的副边线圈中心的基准坐标进行处理,得到副边最佳充电位置;
机械臂,用于根据副边最佳充电位置驱动地端无线充电模块的移动,使得车端无线充电模块和地端无线充电模块达到精准对接。机械臂包括舵机和防堵转模块。机械臂可以选择合适的自由度来完成所需要实现的动作,且需要有通信功能,实现位置信息的获取。基于控制方法和控制运动范围,采用的是六自由度机械臂来实现原边线圈的驱动。
参见图3,适用于上述电动汽车无线精准充电系统的一种电动汽车无线精准充电方法,包括:
S1:用户将电动汽车车停在预设充电位置,用户通过用户终端发出充电指令至电动汽车终端;
S2:角度距离测量模块2发出激光至地下充电终端的激光感应板,测量出车端无线充电模块到激光感应板的距离和电动推杆1下降后的车端无线充电模块的位置信息,并将位置信息发送到地下充电终端,同时激光感应板检测副边线圈中心的基准坐标;其中激光测距仪发出激光至地下充电终端的激光感应板,测量副边到激光感应板、副边到原边线圈的距离;其中副边到激光感应板的距离作为电动推杆1推动副边下降的距离;陀螺仪测量副边在三个维度上的角度。
S3:闭环控制系统根据车端无线充电模块到激光感应板的距离控制电动推杆1下降,电动推杆1下降带动车端无线充电模块下降;本发明的原边线圈和副边线圈对接过程中,电动推杆1采用闭环控制系统下降,角度距离测量模块2实时传回电动推杆1到激光感应板距离(车端无线充电模块到激光感应板的距离),闭环控制系统根据反馈的距离调整电动推杆1下降的速度,直至到达最佳位置为止。
S4:地下充电终端根据车端无线充电模块的位置信息和激光感应板检测的副边线圈中心的基准坐标,得到副边最佳充电位置;
S5:机械臂驱动地端无线充电模块到达副边最佳充电位置,开始充电,充电过程中实时监测是否存在安全隐患,充满后自动断电。
在本实施例,步骤S4包括:
根据激光测距仪、陀螺仪与激光感应板收集到的数据信息,初步定位原边线圈中心的坐标范围为(X+a,Y+b,Z+c),其中a,b,c为偏角移差,X、Y、Z分别为以感应板为XOY面建立的直角坐标系三个坐标轴;激光光源射在感应板上形成激光点,其基准坐标(X,Y)。
利用从陀螺仪传回的角度数据,经上位机编译后,在三个维度的数据中可得到,由陀螺仪转轴与水平面XOY,垂直面XOZ,垂直面YOZ的夹角组成的向量
感应板包括高为H1的光电感应透光板(PVC材料及封装在内的光电探测器),以及高为H2的铁氧体磁芯(承重板)组成。由于磁力传播存在介质损耗与偏向传播等问题,因此原边线圈的放置位置需要进行再修正。E为磁场,L为测距距离。
将双层介质以及空气的方向修正量设为δ,从感应板向下方的偏角为(θ+δ);则原边放置角度为
初始磁损耗为
对上述方程组求解,解出修正量δ与间隙距离ΔX;
数据处理模块对得到的修正量δ与间隙距离ΔX进行处理,得到副边最佳充电位置。
需要说明的是,闭环控制系统就是自动控制原理里面常用的控制系统,利用激光测距仪和数据处理模块进行闭环控制。激光测距测到的距离越近推杆的下降越缓慢。
本方案可应用在各种电动汽车中,通过在地下建设无线充电原边线圈,能够实现车端副边线圈与地端原边线圈精准对接并进行无线充电,解决了无线充电无法精准对接的问题,提高了电动汽车无线充电效率。
上述具体实施方式为本发明的优选实施例,并不能对本发明进行限定,其他的任何未背离本发明的技术方案而所做的改变或其它等效的置换方式,都包含在本发明的保护范围之内。
- 一种精准定位的电动汽车无线充电系统及方法
- 一种精准定位的电动汽车无线充电系统及方法