一种基于Yolov3算法的钢包号检测识别方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及钢铁生产过程信息化技术领域,具体是一种基于Yolov3算法 的钢包号检测识别方法。
背景技术
钢包在炼钢车间流转过程中,为了正确匹配钢包与其所携带的钢水信息, 并监测钢包使用状态,需要对钢包进行跟踪管理;为确保钢包作业安全、有 序、高效的进行,使用钢包号自动识别技术尤为关键;由于炼钢车间的恶劣 环境,由于高温钢水的影响,采集到的图像的光照条件复杂,空中灰尘使得 图像噪声较大。
公告号为CN110321751A的中国发明专利公开了一种钢包号识别的方法, 是对钢包号进行二进制编码,再将编码焊接在钢包表面上,最后采集钢包图 像进行扫描识别;该方法同样是采集钢包图像,并不能消除图像中光照、噪 声等因素的影响;并且使用编码的方法具有不直观、难以维护等缺点。
早期的图像识别技术主要是基于人工选取特征的方法,再结合浅层神经 网络分类器,达到识别的效果;这类方法非常依赖专家的先验知识,并且这 种方法对图像特征选取的数量有限,不能完全适应不同的环境条件,识别的 准确率较低。
发明内容
本发明的目的在于提供一种基于Yolov3算法的钢包号检测识别方法,以 解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种基于Yolov3算法的钢包号检测识别方法,所述的方法包括以下步骤:
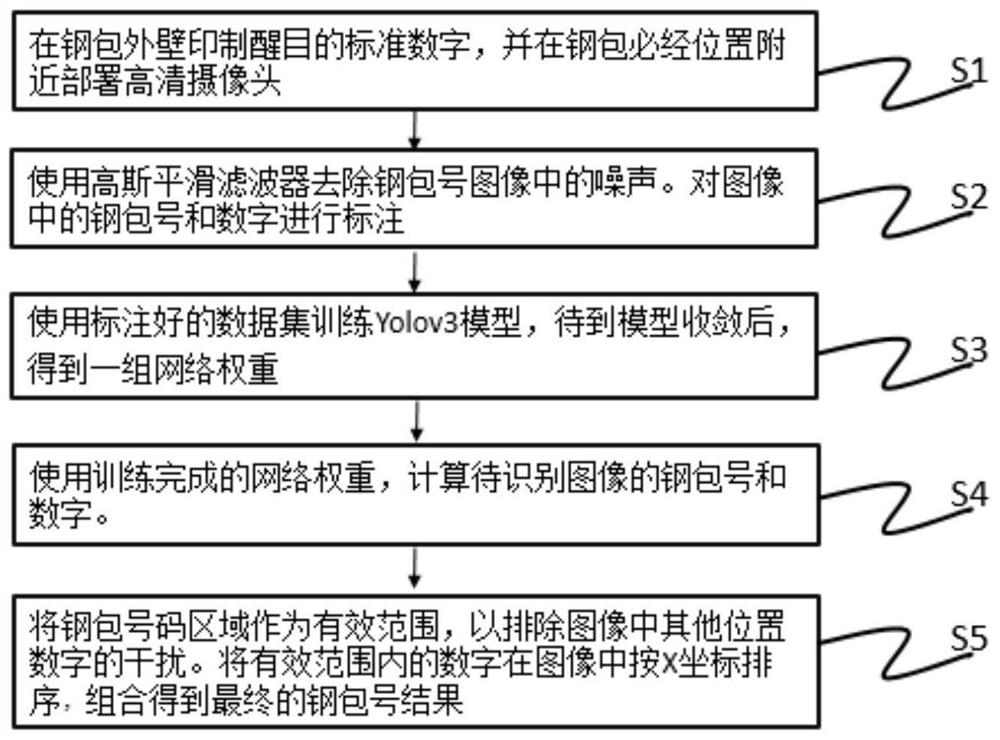
步骤1:在钢包外壁印制醒目的标准数字,并在钢包必经位置处部署高清 摄像头,以便识别钢包外壁所印制的数字;
步骤2:使用高斯平滑滤波器去除钢包号图像中的噪声,并对图像中的钢 包号和数字进行标注;
步骤3:使用标注好的数据集训练Yolov3模型,待到模型收敛后,得到 一组网络权重;
步骤4:使用训练完成的网络权重,计算待识别图像的钢包号和数字;
步骤5:将计算出钢包号码的有效区域范围,并将数字组合得出最终结果。
优选的,在钢包外壁印制醒目的标准数字,并且在号码外部加上外圈以 避免其他数字的干扰。
优选的,采集到的钢包图像首先使用高斯平滑滤波器进行去噪声预处理, 然后标注出每个数字和钢包号整体。
优选的,使用标注好的钢包号码数据集,不断地迭代优化Yolov3模型, 即代表图像特征的卷积神经网络。得到最终适用于钢包识别的网络模型。
优选的,首先找到钢包号整体,排除钢包号范围外的干扰数字;找到有 效范围的数字后,再根据x坐标进行排序,并组合为最终结果。
与现有技术相比,本发明的有益效果是:
1、无需对钢包号进行设计编码,可以准确地识别直观的数字;
2、可以很好的适应炼钢车间的复杂环境,提取到图像更深层的特征;
3、检测准确率较高,误检与漏检的情况较少。
附图说明
图1为本发明一种基于Yolov3算法的钢包号检测识别方法的流程图;
图2为本发明一种基于Yolov3算法的钢包号检测识别方法的钢包号印制 图;
图3为发明一种基于Yolov3算法的钢包号检测识别方法的对钢包号进行 识别的效果图;
图4为发明一种基于Yolov3算法的钢包号检测识别方法的Yolov3算法检 测效果图;
图5为发明一种基于Yolov3算法的钢包号检测识别方法的Yolov3算法程 序图;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而 不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做 出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种基于Yolov3算法的钢包号检测识别方法,方法包括以下步骤:
步骤1:在钢包外壁印制醒目的标准数字,并在钢包必经位置附近部署高 清摄像头。为了避免钢包上其他位置的数字和非钢包上的数字干扰,在钢包 号外画一个范围圈,在识别钢包号时,只选择圈内的数字;
步骤2:在接收到上位机发送的钢包到达信号时,调用相机拍摄,采集钢 包图像;接着使用高斯平滑滤波器对图像去噪;然后对图像中的钢包号码及 阿拉伯数字进行标注,构建适用于Yolov3训练的目标检测数据集;最后使用 k-means聚类算法计算出适应钢包号及数字的锚点框尺寸;
步骤3:配置适用于钢包检测数据集的网络模型训练超参数;训练卷积神 经网络Yolov3模型直到网络模型收敛;
步骤4:使用训练好的Yolov3模型来检测新的图像;计算出检测到的钢 包号和数字;
步骤5:根据计算的钢包号在图像中的坐标,确定钢包号在图像中的范围, 并且删除不在此范围的数字;将有效范围内的数字按中心点X坐标排序;最 后组合为最终的钢包号。
实施例1
本案例是将印制号的钢包号模板焊接在钢包外壁;如图2所示,钢包号 模板是一块圆形铁制模板,从中间扣出对应的号码数字,将模板焊接在合适 的位置后,使用白色耐高温蜡笔填图模板中的数字空隙,并在外圈画出圆; 这样做可以和钢包背景颜色形成较大的色差对比,同时焊制的模板可以保证 数字长久有效;在外部画圈的目的是为了只识别圈中的数字,防止其他位置 数字的干扰。
在接收到上位机发送的钢包到达信号时,调用相机拍摄图像,保存钢包 图像作为训练数据;上位机到达信号主要是根据天车吊钢包的位置和重量信 息来判断。
实施例2
本实施例在采集3000余张图像后,首先使用高斯平滑滤波器对图像进行 去噪,图像去噪声后的效果如图3;高斯平滑滤波器使整张图像均匀平滑,去 除细节,过滤掉噪声;不同于均值滤波器,高斯平滑滤波器的核内的数是呈 现高斯分布的,二维高斯分布公式如下:
G(x,y)=1/(2πσ^2)e^(-(x^2+y^2)/(2σ^2))
其中σ为高斯参数,它决定了高斯滤波器的宽度;σ值越大,模分布图 越扁平,模版越大。
然后使用标注工具labelImg对去噪后的图像集进行标注,每一个标注的 信息包括类别classes和对应像素框的“x”,“y”,“w”,“h”,x,y代 表图像中一个像素点的坐标,即像素框的左上角坐标。w,h代表像素框的宽 度和高度;标注的类别包含11类:ladle_num,0,1,2,3,4,5,6,7,8, 9。其中“ladle_num”表示整个钢包号加上外圈,各个数字代表对应的类别
实施例3
Yolov3算法使用darkNet53卷积神经网络作为特征提取的基础网络, darkNet53结构图如图5,Yolov3算法描述为:(1)首先按将图像划分为S*S 固定的网格,如果目标中心落在对应网格,该网格负责这个目标的检测;(2) 其中每个网格对落在网格中的B个物体进行分类,得到物体所属类别的概率, 然后回归预测其位置信息,最后将位置坐标和类别概率整合为一串信息;(3) 由于每个物体包含多个预测框,使用非极大值抑制算法,筛选出每个物体概 率最高的边框;(4)最后网络的输出是每个网格的对应类别和位置信息。
Yolov3损失函数如下:
其中,网格一共是S*S个,每个网格产生B个候选框,最终会得到S*S* B个边界框;I_ij^obj表示第i个网格的第j个边界框,如果边界框负责目 标物则为1,否则为0。
损失函数前两项为中心坐标误差和宽高坐标误差,两项坐标误差时为了 表示预测框的坐标位置;x^,y^,w^,h^分别代表预测框的(x,y)坐标 和宽高。
第三项和第四项时置信度误差,第三项是存在预测对象的候选框的置信 度误差,第四项是不存在预测对象的候选框的置信度误差;C^表示预测框物 体所代表的类别。
最后一项是分类误差,分类误差选择了交叉熵作为损失函数;p^表示预 测类别的概率。
训练Yolov3模型的过程,使用梯度下降法,安装一定的学习率一步步迭 代优化,求得损失函数得最优解。
模型训练完成后,在用于检测钢包号时,因为钢包或其他区域包含数字; 所以,首先找到ladle_num类的框,根据其坐标确定钢包号所在的范围,将 中心点不在这个范围的数字都排除掉;剩下检测到的数字,按照x坐标大小 排序,再组合为最终的钢包号结果;使用yolo算法检测效果如图4。
与印制编码和使用早期图像处理技术相比,本发明提出的一种基于 Yolov3算法的钢包号检测识别方法,在处理印制钢包号时更为简单易行,识 别准确率更高,误检和漏检的情况极少;推动了钢铁生产过程信息化的发展。
虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个 独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人 员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合, 形成本领域技术人员可以理解的其他实施方式。
故以上所述仅为本申请的较佳实施例,并非用来限定本申请的实施范围; 即凡依本申请的权利要求范围所做的各种等同变换,均为本申请权利要求的 保护范围。
- 一种基于Yolov3算法的钢包号检测识别方法
- 基于YOLOV3算法的二次检测口罩人脸识别方法