目标级车道线的平行处理方法、系统、车辆及存储介质
文献发布时间:2023-06-19 11:02:01
技术领域
本发明属于自动驾驶中的车道线处理技术领域,具体涉及一种目标级车道线的平行处理方法、系统、车辆及存储介质。
背景技术
在自动驾驶功能中,横向控制的安全性和体验感对车道线质量具有强依赖性。目前带有自动驾驶功能的汽车都至少配有一个前视智能摄像头,该智能摄像头会通过相机实时获取路况图像,通过一块图像处理芯片对图像进行实时处理,并输出目标级的障碍物目标和车道线。由于摄像头易受天气、光线、视野遮蔽等因素的影响,以及受限于或技术或成本的图像处理芯片的性能有限,输出的车道线准确性低、波动大或左右两侧线相差较大。几种主要的车道线异常状态包括:
(1)单侧车道线丢失;
(2)单侧车道线异常;
(3)双侧车道线呈发散或内扣状;
(4)车道线突变等。
智能摄像头输出的车道线无法直接用于横向控制。仅通过滤波处理无法消除这些异常,易造成横向控制中本车在车道内晃动体验感差,甚至偏离车道造成安全隐患。
因此,有必要开发一种新的目标级车道线的平行处理方法、系统、车辆及存储介质。
发明内容
本发明的目的是提供一种目标级车道线的平行处理方法、系统、车辆及存储介质,通过对摄像头输出的目标级车道线进行平行化处理,能对系统整体性能有较大提升。
第一方面,本发明所述的一种目标级车道线的平行处理方法,包括以下步骤:
步骤1、摄像头采集车道线信息,判断上一帧是否有有效车道线输出,若无,进入步骤2,若有,则进入步骤3;
步骤2、车道线初始化,则将摄像头输出的该帧车道线作为车道线的当前帧输出,并返回步骤1;
步骤3、观测线的选择,候选的观测线有当前帧的左车道线y
步骤4、若在步骤3中选择出了有效观测线,则进入步骤5,若没有观测线满足要求,则进入步骤6;
步骤5、跟踪车道宽度,根据观测线和车道宽度平移生成中心线,进入步骤7;
步骤6、根据上一帧输出的有效车道线的中心线,以及本车的运动姿态推算出当前帧的中心线,进入步骤7;
步骤7、根据跟踪的车道宽度对当前帧的中心线进行平移,生成最终输出的平行车道线。
进一步,所述步骤2中,初始化成功的条件如下:
左右两根车道线同时存在,且左右车道线基本平行或在直道上左右车道线基本对称。
进一步,所述左右车道线基本平行的判断方法为:
计算平行度:将车道线划分为n段,划分间隔为Δd;若左右车道线完全平行,则左车道线的三次曲线y
所述左右车道线基本对称的判断方法:
计算对称度:在直道上时,将车道线划分为n段,划分间隔为Δd;以y=(C
S
S
Th
进一步,所述步骤3中,相似度用平行度来表示,通过平行长度表示整条曲线的平行度Paral
第二方面,本发明所述的一种目标级车道线的平行处理系统,包括:
用于获取车道线的摄像头;
接收摄像头所获取的车道线的车道线平行处理模块,该车道线平行处理模块与摄像头连接;
所述车道线平行处理模块被编程以便执行如本发明所述的目标级车道线的平行处理方法所述的步骤。
第三方面,本发明所述的一种车辆,采用如本发明所述的目标级车道线的平行处理系统。
第四方面,本发明所述的一种存储介质,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述控制器调用计算机可读程序时能执行如本发明所述的目标级车道线的平行处理方法的步骤。
本发明具有以下优点:在工业产品中,由于摄像头硬件易受环境影响的特点获取的路况图像质量低,技术层面图像处理算法能力有限,或受限于成本的软硬件性能较差等原因,导致在应用层获取的目标级车道线无法直接应用于横向控制。基于在大多情况下道路左右车道线平行的基本认知,本发明提供了一种车道线平行处理方法,能够修复单侧车道线丢失,单侧车道线异常以及双侧车道线呈发散或内扣状等车道线异常情况,判断出并舍弃双侧车道线突变异常,提升了车道线质量。本发明的优点还在于阈值较少且易设置,即性能对阈值的敏感性较低,能够降低因阈值设置导致的误判漏判情况。本发明中的观测线选择可用于多源信息融合时观测线的选择。在实际的应用测试中证明该方法能够提升自动驾驶横向控制的稳定性。
附图说明
图1为本实施例中计算基于的本车坐标系;
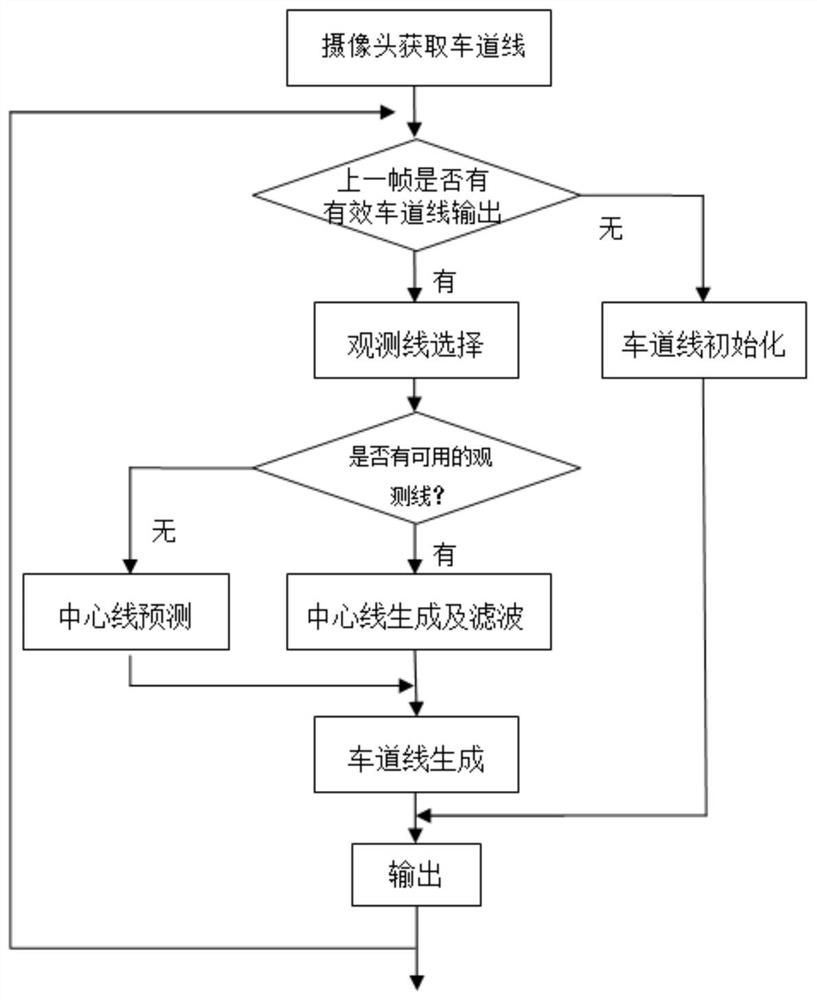
图2为本实施例中的车道线平行处理流程图。
具体实施方式
下面结合附图对本发明作进一步说明。
如图1和图2所示,一种目标级车道线的平行处理方法,包括以下步骤:
步骤1、摄像头采集车道线信息,判断上一帧是否有有效车道线输出,若无,进入步骤2,若有,则进入步骤3;
步骤2、车道线初始化,则将摄像头输出的该帧车道线作为车道线的当前帧输出,并返回步骤1。
本实施例中,初始化成功的条件如下:
左右两根车道线同时存在,且左右车道线基本平行或在直道上左右车道线基本对称,若车道线初始化成功,则摄像头输出的该帧车道线直接作为车道线平行处理模块的当前帧输出,若初始化失败,则输出默认值(无效值),下一帧循环中将重新初始化。
本实施例中,所述左右车道线基本平行的判断方法为:
计算平行度:将车道线划分为n段(比如:每10米一段),划分间隔为Δd;若左右车道线完全平行,则左车道线的三次曲线y
所述左右车道线基本对称的判断方法:
计算对称度:在直道上且本车与车道线的相对航向可忽略不计时,左右车道线不平行但基本对称也可初始化成功。将车道线划分为n段,划分间隔为Δd;以y=(C
S
S
Th
若车道线初始化成功,即每段都满足Paral
步骤3、由于摄像头输出的车道线前后帧可能发生突变,或当前左右线的斜率、曲率相差较大,无法直接使用。车道线选择的基本思想是根据车道线前后帧的相似性,选择与前一帧处理后的车道线形状更相近的线作为当前帧的观测值。当前的观测值有三种选择:(1)左车道线;(2)右车道线;(3)中心线;其中的中心线可以很好地应对单纯左线或右线都不可用,但两者较为对称的情况。
观测线的选择:候选的观测线有当前帧的左车道线y
S
S
Paral
本步骤与步骤2的区别是:步骤2判断是否平行,本步骤需选出平行度最好的线。在本步骤中分段平行度的阈值可适度放宽,仅用于滤除异常的线。通过平行长度表示整条曲线的平行度Paral
步骤4、若在步骤3中选择出了有效观测线,则进入步骤5,若没有观测线满足要求,即max(Paral
步骤5、中心线生成及滤波:跟踪车道宽度,根据观测线和车道宽度平移生成中心线,并对中心线进行滤波,本实施例中,采用低通滤波或卡尔曼滤波等对中心线进行滤波处理,进入步骤7。
本实施例中,车道宽度更新策略:
(1)观测线为中心线,且双侧车道线质量较高时更新车道宽度;
(2)本车变道时更新车道宽。
步骤6、中心线预测:根据上一帧输出的有效车道线的中心线,以及本车的运动姿态推算出当前帧的中心线,进入步骤7。
步骤7、车道线预测:根据跟踪的车道宽度对当前帧的中心线进行平移,生成最终输出的平行车道线。
本实施例中所述的目标级车道线的平行处理系统,包括:
用于获取车道线的摄像头;
接收摄像头所获取的车道线的车道线平行处理模块,该车道线平行处理模块与摄像头连接;
所述车道线平行处理模块被编程以便执行如本实施例中所述的目标级车道线的平行处理方法所述的步骤。
本实施例中所述的一种车辆,采用如本实施例中所述的目标级车道线的平行处理系统。
本实施例中所述的一种存储介质,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述控制器调用计算机可读程序时能执行如本实施例中所述的目标级车道线的平行处理方法的步骤。
- 目标级车道线的平行处理方法、系统、车辆及存储介质
- 车道线融合方法、车道线融合装置、车辆和存储介质