一种管道修补机器人
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及管道修补技术领域,具体地涉及一种管道修补机器人。
背景技术
对现有的城市管网进行建设及更新改造,是城市发展过程中不可回避的问题,采取非开挖手段解决现代管网施工中的开挖问题,以减少开挖施工带来的负面影响是城市建设以及现代社会生活的强烈要求。
现有管道非开挖修复技术是采用人工拖拽修复材料进入管道破裂位置,然后进行管道修复,存在以下问题:(1)工程车辆占道,道路封闭施工,造成拥堵,增大城市交通压力;(2)采用钢板桩进行支护,存在道路整体发生侧移风险;(3)城市地下管网敷设复杂,必要时需要人员进入管道进行修复材料的布置,存在极大的安全隐患;(4)施工复杂,人工成本及修复成本较高;(5)遇到较为严苛的环境,无法进行施工,管道破裂问题越显严重。
发明内容
针对现有技术中存在的问题,本发明提供了一种管道修补机器人。该管道修补机器人避免了车辆占道,道路封闭,阻碍交通的问题,该管道修补机器人在修补管道时不需要任何路面辅助设备,避免对路面造成的影响;同时,管道修补机器人的体积小,轻松进入管道,不需要人工辅助修复材料的布置,没有人员安全隐患;此外,该管道修补机器人具有操作简单、施工成本低廉、环境适用性广,施工可靠性高的特点。
为实现上述目的,本发明采用如下技术方案:一种管道修补机器人,包括:电动推杆、驱动后座模块、驱动前座模块、气囊和气夹;所述电动推杆由固定杆和伸缩杆组成,所述伸缩杆与驱动后座模块连接,所述固定杆与驱动前座模块连接,所述驱动后座模块和驱动前座模块均与气囊、气夹连接。
进一步地,所述驱动后座模块上设有第一气泵、第三气泵、第一气阀,第二气阀、第三气阀、第四气阀、第一三通气管和第二三通气管;所述第一气泵的吸气口与第一三通气管的抽头端口连接,所述第一三通气管的第一直通端口与第一气阀的一端连接,第一三通气管的第二直通端口与第二气阀的一端连接,第二气阀的另一端与气囊连接,所述第一气泵的出气口与第二三通气管的抽头端口连接,所述第二三通气管的第一直通端口与第四气阀的一端连接,所述第二三通气管的第二直通端口与第三气阀的一端相连,第三气阀的另一端与气囊连接,所述第三气泵与气夹连接。
进一步地,所述第一气阀、第二气阀、第三气阀、第四气阀均为常闭型二位二通电磁阀。
进一步地,所述第一气阀、第二气阀、第三气阀、第四气阀的型号为WLF01-2V025-06-B。
进一步地,所述驱动前座模块上设有第二气泵、第四气泵、第五气阀、第六气阀、第七气阀,第八气阀、第三三通气管和第四三通气管,所述第二气泵的吸气口与第三三通气管的抽头端口连接,第三三通气管的第一直通端口与第五气阀的一端连接,第三三通气管的第二直通端口与第六气阀的一端连接,第六气阀的另一端与气囊连接,所述第二气泵的出气口与第四三通气管的抽头端口连接,所述第四三通气管的第一直通端口与第八气阀的一端连接,所述第四三通气管的第二直通端口与第七气阀的一端连接,第七气阀的另一端与气囊连接,所述第四气泵与气夹连接。
进一步地,所述第五气阀、第六气阀、第七气阀、第八气阀为常闭型二位二通电磁阀。
进一步地,所述第五气阀、第六气阀、第七气阀、第八气阀的型号为WLF01-2V025-06-B。
与现有技术相比,本发明具有如下有益效果:该发明修补机器人采用电动推杆实现驱动后座模块的伸展与缩回,缩回时该修补机器人的体积减小,方便修补机器人进入管道,该修补机器人在管道修补处进行伸展,同时通过气囊的膨胀,使涂覆在气囊表面的保鲜膜、玻纤布、环氧树脂胶与待修补的管道紧密贴合,从而实现管道的修补。该管道修补机器人避免了修补时需要封闭道路,引起交通堵塞的问题,具有施工简便、施工成本低廉、环境适用性较广、施工可靠性高的特点。
附图说明
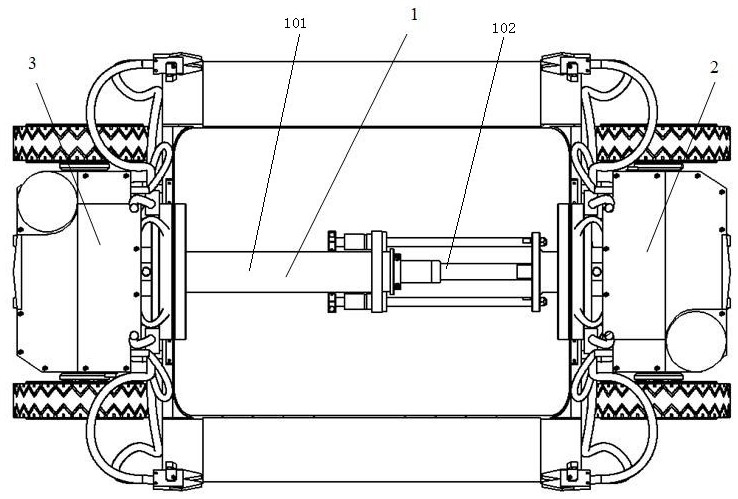
图1为本发明管道修补机器人的正面结构示意图;
图2为本发明管道修补机器人的背面结构示意图;
图3为本发明中气囊与第一气泵连接的结构示意图;
图4为本发明中气囊与第二气泵连接的结构示意图;
图中,1-电动推杆,2-驱动后座模块,3-驱动前座模块,4-气囊,5-气夹,6-第一三通气管,7-第二三通气管,8-第三三通气管,9-第四三通气管,101-固定杆,102-伸缩杆,201-第一气泵,202-第三气泵,203-第一气阀,204-第二气阀,205-第三气阀,206-第四气阀,301-第二气泵,302-第四气泵,303-第五气阀,304-第六气阀,305-第七气阀,306-第八气阀,601-第一三通气管的抽头端口,602-第一三通气管的第一直通端口,603-第一三通气管的第二直通端口,701-第二三通气管的抽头端口,702-第二三通气管的第一直通端口,703-第二三通气管的第二直通端口,801-第三三通气管的抽头端口,802-第三三通气管的第一直通端口,803-第三三通气管的第二直通端口,901-第四三通气管的抽头端口,902-第四三通气管的第一直通端口,903-第四三通气管的第二直通端口。
具体实施方式
参见图1-2,本发明的管道修补机器人包括:电动推杆1、驱动后座模块2、驱动前座模块3、气囊4和气夹5;电动推杆1由固定杆101和伸缩杆102组成,伸缩杆102与驱动后座模块2连接,固定杆101与驱动前座模块3连接,本发明通过电动推杆1的伸缩来实现管道修补机器人的长度变化,当电动推杆1处于缩回状态时,管道修补机器人的长度变短,有益于管道机器人进入管道中;当电动推杆1处于伸展状态时,一方面有利于修补涂料的添加,另一方面修补时有利于修补涂料与破损管道的紧密贴合,顺利完成修补工作。驱动后座模块2和驱动前座模块3均与气囊4、气夹5连接,如图3,驱动后座模块2上设有第一气泵201、第三气泵202、第一气阀203,第二气阀204、第三气阀205、第四气阀206、第一三通气管6和第二三通气管7;第一气泵201的吸气口与第一三通气管6的抽头端口601连接,第一三通气管6的第一直通端口602与第一气阀203的一端连接,第一气阀203的另一端直接与空气相连,第一三通气管6的第二直通端口603与第二气阀204的一端连接,第二气阀204的另一端与气囊4连接,第一气泵201的出气口与第二三通气管7的抽头端口701连接,第二三通气管7的第一直通端口702与第四气阀206的一端连接,第四气阀206的另一端与空气连接,第二三通气管7的第二直通端口703与第三气阀205的一端相连,第三气阀205的另一端与气囊4连接,第三气泵202与气夹5连接。如图4,驱动前座模块3上设有第二气泵301、第四气泵302、第五气阀303、第六气阀304、第七气阀305、第八气阀306、第三三通气管8和第四三通气管9,第二气泵301的吸气口与第三三通气管8的抽头端口801连接,第三三通气管8的第一直通端口802与第五气阀303的一端连接,第五气阀303的另一端与空气相连,第三三通气管8的第二直通端口803与第六气阀304的一端连接,第六气阀304的另一端与气囊4连接,第二气泵301的出气口与第四三通气管9的抽头端口901连接,第四三通气管9的第一直通端口902与第八气阀306的一端连接,第八气阀306的另一端直接与空气相连,第四三通气管9的第二直通端口903与第七气阀305的一端连接,第七气阀305的另一端与气囊4连接,第四气泵302与气夹5连接。本发明中通过第一气泵201、第二气泵301、第一气阀203、第二气阀204、第三气阀205、第四气阀206、第五气阀303、第六气阀304、第七气阀305和第八气阀306来实现气囊4的膨胀与收缩,通过在膨胀的气囊上依次包裹保鲜膜和玻纤布,再通过第三气泵202与第四气泵302来控制气夹5夹紧玻纤布,可以实现环氧树脂胶在玻纤布表面的均匀涂覆,随后再通过气囊4的收缩以及电动推杆1的缩回,减小管道修补机器人的体积与长度,方便管道修补机器人将修补涂料带入管道中,并在管道破损处膨胀气囊4、拉伸电动推杆1,使得修补涂料与管道破损处紧密贴合,实现管道修补。
本发明中的第一气阀203、第二气阀204、第三气阀205、第四气阀206、第五气阀303、第六气阀304、第七气阀305和第八气阀306均为常闭型二位二通电磁阀,型号为WLF01-2V025-06-B,当第二气阀204与第四气阀206通电时,第一气泵201从气囊4中吸气,气囊4收缩;当第一气阀203与第三气阀205通电时,第一气泵201给气囊4充气,气囊4膨胀。当第六气阀304与第八气阀306通电时,第二气泵301从气囊4中吸气,气囊4收缩;当第五气阀303与第七气阀305通电时,第二气泵301给气囊4充气,气囊4膨胀。
本发明的工作过程如下:当检测有管道破损时,推动管道修补机器人的电动推杆1,使伸缩杆伸展,推动驱动后座模块2移动,使管道修补机器人展开,给第一气阀203、第三气阀205、第五气阀303和第七气阀305通电,第一气泵201和第二气泵301给气囊4充气,使气囊4完全膨胀,在气囊4的外侧先包裹保鲜膜,然后再包裹玻纤布,启动第三气泵202和第四气泵302,收缩气夹5,夹紧玻纤布后,在玻纤布表面均匀的涂上环氧树脂胶;随后给第二气阀204、第四气阀206、第六气阀304和第八气阀306通电,第一气泵201和第二气泵301从气囊4中抽气,收缩电动推杆1,收缩气囊4及整车长度;将管道修补机器人放入管道中,并在管道破损处停下,再次展开电动推杆1并给气囊4充气,使气囊4完全膨胀,此时玻纤布与管道紧密贴合,关掉第三气泵202和第四气泵302,气夹5打开,保持此形态50-90分钟后,玻纤布与管道通过环氧树脂胶紧密粘接在一起;再次收缩气囊4和电动推杆1,缩短机器人,使管道修补机器人行驶出管道,完成对管道的修补。
该管道修补机器人避免了修补时需要封闭道路,引起交通堵塞的问题,具有施工简便、施工成本低廉、环境适用性较广、施工可靠性高的特点。
- 一种用于管道内表面修补机器人及修补方法
- 一种管道损伤修补机器人