一种防止输送带跑偏的智能控制装置及控制方法
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及一种输送带,具体涉及一种防止输送带跑偏的智能控制装置及控制方法。
背景技术
输送带广泛应用于各厂矿的散料运输,通常存在一定的跑偏现象,这是由于各种因素引起的。如:皮带接头交接不正、机架不正、滚筒粘料、托辊运转不灵活等。针对上述的皮带跑偏情况,目前主要是机械式调心托辊或液压式纠偏托辊来治理皮带跑偏。机械式调心托辊是靠输送带两侧立辊推挡输送带边缘来达到治理跑偏的目的。液压式纠偏托辊是通过输送带边缘磨擦带动油泵转动,实现油缸推拉来达到治理跑偏的目的。两种方式都作用于输送带边缘,久而久之,输送带边缘会开裂情况,影响了输送带的正常使用寿命。同时这两种纠正输送带跑偏的方式也存在着纠偏不足或过度纠偏的问题,无法准确的对输送带跑偏量进行计算。
发明内容
本发明的目的是提供一种防止输送带跑偏的智能控制装置及控制方法,该产品具有智能化无接触检测跑偏量,对输送带边缘不磨损,智能化匹配纠偏量,可靠性高,无需维护等特点。
为了达到上述目的,本发明有如下技术方案:
本发明的一种防止输送带跑偏的智能控制装置,包括PLC、伺服电机、驱动器、两个超声波测距传感器、三支辊筒、摆动托架、辊筒支撑座、下托梁、旋转轴、齿轮组、两个保险限位装置;下托梁固定在输送机架上,轴承组与下托梁连接,摆动托架与旋转轴焊接连接后插入轴承组中紧固,旋转轴末端安装齿轮并固定,伺服电机水平安放在下托梁下面,伺服电机轴头装有齿轮,旋转轴末端齿轮与伺服电机轴头齿轮相对齿啮合,驱动器安放下托梁上面,PLC安放下托梁上面,两个超声波测距传感器分别安装在摆动托架两端;三支辊筒形成辊筒组,所述输送带在辊筒组上运行,所述辊筒支撑座与摆动托架连接,三支辊筒与辊筒支撑座连接,三支辊筒、辊筒支撑座、摆动托架形成一个整体,当摆动托架摆动时,辊筒组随之摆动;两个保险限位装置分别固定在下托梁两侧,保险限位装置用于防止PLC、伺服电机、驱动器出现故障时,能够限制摆动托架摆动幅度,从而防止摆动托架将输送带破坏,导致输送带不能正常工作;所述PLC分别与驱动器、两个超声波测距传感器电连接,驱动器与伺服电机电连接。
其中,所述摆动托架是由槽钢在两端2/3处折弯后制成,折弯后形成的摆动托架既能保护辊筒组,又能使摆动托架与辊筒组形成一个整体后具有一定的扭转强度,所述辊筒支撑座与槽钢栓接,设定辊筒到摆动托架之间的距离为48-52mm,该距离既能防止输送带上掉渣卡住输送带,又能便于维修。
其中,所述保险限位装置包括L型挡杆、底板、弹簧、挡板,所述L型挡杆的底部固定在下托梁侧面,底板固定在L型挡杆上部,弹簧与底板固定,挡板与弹簧固定。
本发明的一种防止输送带跑偏的智能控制装置的控制方法,其特征在于有以下步骤:
1)输送带向一侧发生跑偏后,摆动托架一端的超声波测距传感器检测到输送带边缘与超声波测距传感器之间距离小于设定值时,超声波测距传感器的测距信号传给PLC,经PLC处理后给驱动器发出开启指令,驱动器开启伺服电机正向转动,伺服电机通过齿轮传动使摆动托架摆动,摆动托架上的辊筒组正向偏转,这时辊筒组与输送带由原来的垂直角度发生正向位移,位移后的角度与原来垂直角度形成了一个夹角,这个夹角对输送带产生了横向复位力,输送带在横向复位力作用下,开始复位并居中,居中后的输送带边缘与超声波测距传感器之间距离等于设定值时,超声波测距传感器的测距信号传回PLC,经PLC处理后给驱动器发出关闭指令,驱动器关闭伺服电机,此时辊筒组对输送带产生的横向复位力与输送带外在的跑偏作用力相等,输送带居中正常运行。
2)输送带向另一侧发生跑偏后,摆动托架另一端的超声波测距传感器检测到输送带边缘与超声波测距传感器之间距离小于设定值时,超声波测距传感器的测距信号传给PLC,经PLC处理后给驱动器发出开启指令,驱动器开启伺服电机反向转动,伺服电机通过齿轮传动使摆动托架摆动,摆动托架上的辊筒组反向偏转,这时辊筒组与输送带由原来的垂直角度发生反向位移,位移后的角度与原来垂直角度形成了一个夹角,这个夹角对输送带产生了横向复位力,输送带在横向复位力作用下,开始复位并居中,居中后的输送带边缘与超声波测距传感器之间距离等于设定值时,超声波测距传感器的测距信号传回PLC,经PLC处理后给驱动器发出关闭指令,驱动器关闭伺服电机,此时辊筒组对输送带产生的横向复位力与输送带外在的跑偏作用力相等,输送带居中正常运行。
由于采取了以上技术方案,本发明的的优点在于:
1、无接触检测跑偏量,对输送带边缘零磨损,延长了输送带的使用寿命。
2、采用了超声波测距传感器检测输送带跑偏量,能使跑偏量的读取更加精准,方便岗位工人做记录,及时发现问题。
3、可以合理准确的分配纠偏力,避免纠偏不足或过度纠偏的问题。
附图说明
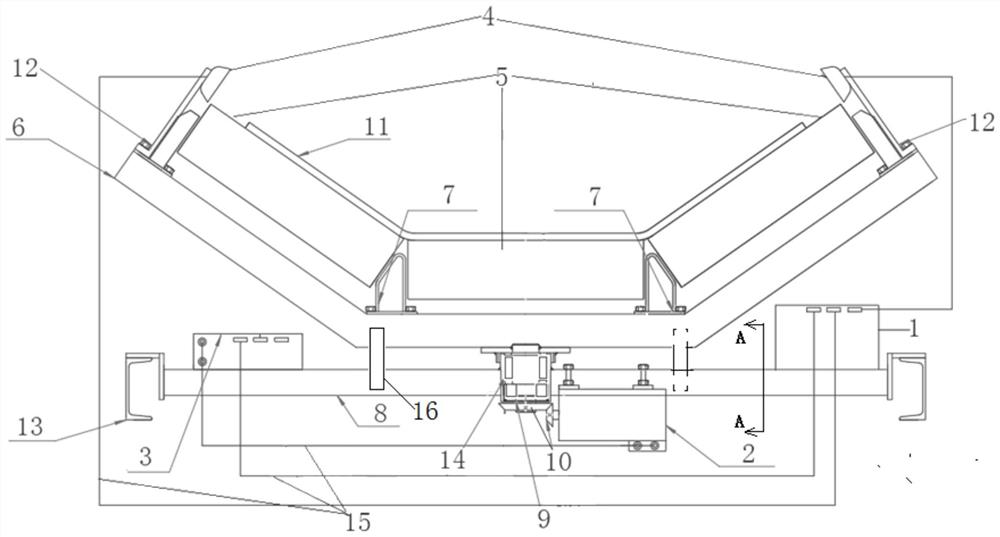
图1为本发明的结构示意图;
图2为图1的下托梁在A-A向的剖视图的示意图。
图中,1、智能控制器由PLC;2、伺服电机;3、驱动器;4、超声波测距传感器;5、三支辊筒;6、摆动托架;7、辊筒支撑座;8、下托梁;9、旋转轴;10、齿轮组;11、输送带;12、超声波测距传感器支架;13、输送机架;14、轴承组;15、电源线;16、L型挡杆;17、底板;18、弹簧;19、挡板。
具体实施方式
以下实施例用于说明本发明,但不用来限制本发明的范围。
本发明的一种防止输送带跑偏的智能控制装置,包括PLC、伺服电机、驱动器、两个超声波测距传感器、三支辊筒、摆动托架、辊筒支撑座、下托梁、旋转轴、齿轮组、两个保险限位装置;下托梁固定在输送机架上,轴承组与下托梁连接,摆动托架与旋转轴焊接连接后插入轴承组中紧固,旋转轴末端安装齿轮并固定,伺服电机水平安放在下托梁下面,伺服电机轴头装有齿轮,旋转轴末端齿轮与伺服电机轴头齿轮相对齿啮合,驱动器安放下托梁上面,PLC安放下托梁上面,两个超声波测距传感器分别安装在摆动托架两端;三支辊筒形成辊筒组,所述输送带在辊筒组上运行,所述辊筒支撑座与摆动托架连接,三支辊筒与辊筒支撑座连接,三支辊筒、辊筒支撑座、摆动托架形成一个整体,当摆动托架摆动时,辊筒组随之摆动;两个保险限位装置分别固定在下托梁两侧,保险限位装置用于防止PLC、伺服电机、驱动器出现故障时,能够限制摆动托架摆动幅度,从而防止摆动托架将输送带破坏,导致输送带不能正常工作;所述PLC分别与驱动器、两个超声波测距传感器电连接,驱动器与伺服电机电连接。
所述摆动托架是由槽钢在两端2/3处折弯后制成,折弯后形成的摆动托架既能保护辊筒组,又能使摆动托架与辊筒组形成一个整体后具有一定的扭转强度,所述辊筒支撑座与槽钢栓接,设定辊筒到摆动托架之间的距离为48-52mm,该距离既能防止输送带上掉渣卡住输送带,又能便于维修。
所述保险限位装置包括L型挡杆、底板、弹簧、挡板,所述L型挡杆的底部固定在下托梁侧面,底板固定在L型挡杆上部,弹簧与底板固定,挡板与弹簧固定。
本发明的一种防止输送带跑偏的智能控制装置的控制方法,其特征在于有以下步骤:
1)输送带向一侧发生跑偏后,摆动托架一端的超声波测距传感器检测到输送带边缘与超声波测距传感器之间距离小于设定值时,超声波测距传感器的测距信号传给PLC,经PLC处理后给驱动器发出开启指令,驱动器开启伺服电机正向转动,伺服电机通过齿轮传动使摆动托架摆动,摆动托架上的辊筒组正向偏转,这时辊筒组与输送带由原来的垂直角度发生正向位移,位移后的角度与原来垂直角度形成了一个夹角,这个夹角对输送带产生了横向复位力,输送带在横向复位力作用下,开始复位并居中,居中后的输送带边缘与超声波测距传感器之间距离等于设定值时,超声波测距传感器的测距信号传回PLC,经PLC处理后给驱动器发出关闭指令,驱动器关闭伺服电机,此时辊筒组对输送带产生的横向复位力与输送带外在的跑偏作用力相等,输送带居中正常运行。
2)输送带向另一侧发生跑偏后,摆动托架另一端的超声波测距传感器检测到输送带边缘与超声波测距传感器之间距离小于设定值时,超声波测距传感器的测距信号传给PLC,经PLC处理后给驱动器发出开启指令,驱动器开启伺服电机反向转动,伺服电机通过齿轮传动使摆动托架摆动,摆动托架上的辊筒组反向偏转,这时辊筒组与输送带由原来的垂直角度发生反向位移,位移后的角度与原来垂直角度形成了一个夹角,这个夹角对输送带产生了横向复位力,输送带在横向复位力作用下,开始复位并居中,居中后的输送带边缘与超声波测距传感器之间距离等于设定值时,超声波测距传感器的测距信号传回PLC,经PLC处理后给驱动器发出关闭指令,驱动器关闭伺服电机,此时辊筒组对输送带产生的横向复位力与输送带外在的跑偏作用力相等,输送带居中正常运行;
为了防止PLC、伺服电机、驱动器出现故障时,能够限制摆动托架摆动幅度,从而防止摆动托架将输送带破坏,导致输送带不能正常工作;在下托梁两侧分别设有两个保险限位装置;当PLC、伺服电机、驱动器出现故障时,摆动托架超过设定的摆动幅度时,保险限位装置会挡住摆动托架继续摆动;而且在保险限位装置上设有挡板和弹簧,摆动托架碰到保险限位装置时,不会硬撞,而是柔性止位,能够避免机械的损坏。
PLC:厂家:西门子,型号:S7-300;
伺服电机及驱动器:北京超同步科技,型号:Z18-40P7;
超声波测距传感器:深圳电进联科技,型号:DJLK-CB-001。
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无法对所有的实施方式予以穷举。凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
- 一种防止输送带跑偏的智能控制装置及控制方法
- 一种防止汽车制动跑偏的控制装置及其控制方法