垃圾收集点垃圾桶更换的方法及装置
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及垃圾收集技术,具体地说以一种垃圾收集点垃圾桶更换的方法及装置。
背景技术
目前设置在居民生活小区的一种垃圾收集站的基本结构形式为,在垃圾房上设置若干投放窗口(便于垃圾分类投放),垃圾房内每个投放窗口的后下方设有一垃圾桶。这种垃圾收集站存在的不足是:当每个投放窗口所对应的一个垃圾桶装满后,需要由人工及时的更换,对于管理垃圾站的工作人员来说,每天需要频繁的奔波于各小区的垃圾收集站之间,以便于及时更换垃圾桶,这样,一则要求有较多的工作人员,二则,工作人员的工作量较大。
发明内容
本发明的目的在于提供一种垃圾收集点垃圾桶更换的方法及装置,该垃圾桶更换的方法及装置可实现多个垃圾桶自动轮换盛装垃圾,大大提高垃圾收集点的储存量。
为了实现上述目的,本发明提供的垃圾收集点垃圾桶更换的方法采用如下方案:设置上下两层搁置平台,每层搁置平台上排列若干空垃圾桶,首先向下层搁置平台前端部上处于投放位置的垃圾桶中投放垃圾,当该垃圾桶中装满垃圾后,使上层搁置平台上的各垃圾桶向前方移动、下层搁置平台上的各垃圾桶向后方移动,并使上层搁置平台上排在第一位的垃圾桶落在下层搁置平台上的投放位置上,使下层搁置平台上排在最后一位的垃圾桶上升至上层搁置平台的最后一位,然后再次重复上述投放及移动过程,如此持续,直至所有垃圾桶装满垃圾后,用一批空的垃圾桶将装满垃圾的垃圾桶更换。
为了实现上述目的,本发明提供的垃圾桶更换装置采用以下方案:垃圾桶更换装置, 它具有上下对应布置的上层水平输送机构和下层水平输送机构,上层水平输送机构和下层水平输送机构安装于机架上,机架的前部及后部上分别设有一套夹持升降机构,机架上设有控制系统,上层水平输送机构、下层水平输送机构、夹持升降机构中具有的动力设备与控制系统相接。
本发明提供的方法可实现多个垃圾桶在占用空间较小的状况下,轮换盛装垃圾,且垃圾桶的更换容易操控。
本发明提供的垃圾桶更换装置在使用时,在上层水平输送机构和下层水平输送机构上排列若干空垃圾桶,首先向下层水平输送机构前端部上处于投放位置的垃圾桶中投放垃圾,当该垃圾桶中装满垃圾后,启动两套夹持升降机构,分别将上层水平输送机构上排在第一位的垃圾桶及下层水平输送机构上排在最后位的垃圾桶夹持悬空,然后启动上层水平输送机构及下层水平输送机构,使上层各垃圾桶向前方移动、下层的各垃圾桶向后方移动,然后接着由夹持升降机构将前方悬空的垃圾桶放在下层水平输送机构前端部上、将后方悬空的垃圾桶放在上层水平输送机构后端部上,即可再次向下层水平输送机构前端部上的垃圾桶投放垃圾,不断重复上述过程,即可使所有垃圾桶装满垃圾。
本发明提供的垃圾桶更换方法合理、可靠,本发明提供的垃圾桶更换装置结构合理、性能可靠,本发明提供的方法及装置可提高垃圾收集点的垃圾存储量,大大延长垃圾桶的更换周期,并减少管理人员及其工作量。
附图说明
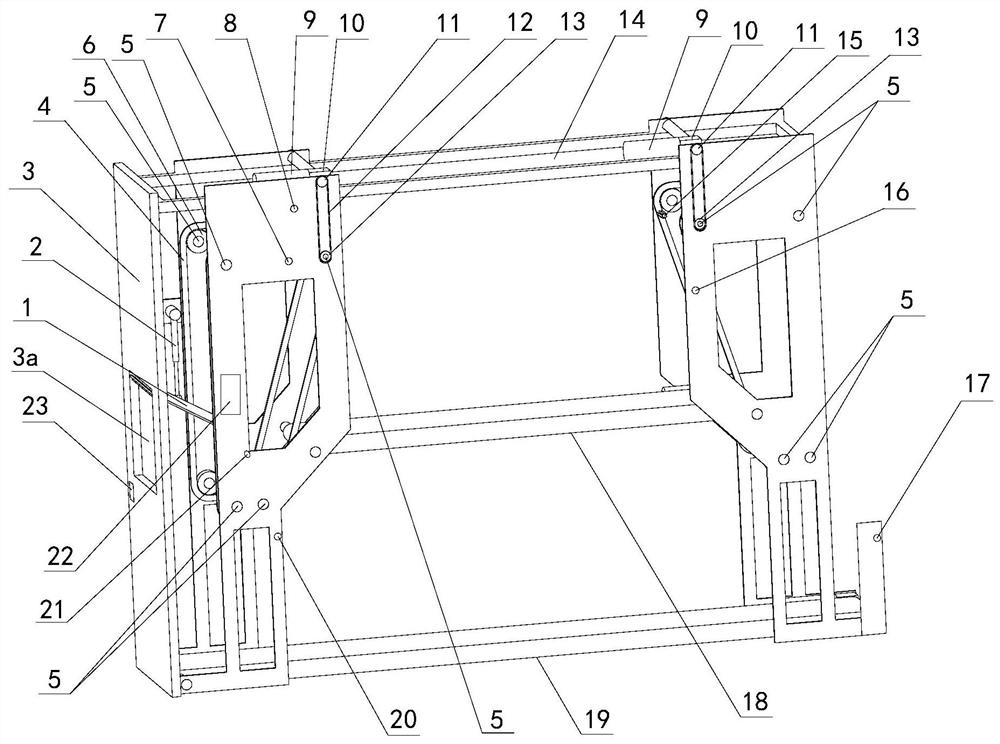
图1为本发明一实施例的结构示意图;
图2为图1的主视图;
图3为图2的俯视图;
图4为图3的A-A剖视图;
图5为本发明一实施例的使用状态示意图。
具体实施方式
以下结合实施例及附图进一步说明本发明。
参见图1、图2、图3、图4
本发明提供的垃圾桶更换装置具有上下对应布置的上层水平输送机构18和下层水平输送机构19,上层水平输送机构18和下层水平输送机构19安装于机架14上,机架14的前部及后部上分别设有一套夹持升降机构,机架14上设有控制系统,上层水平输送机构18、下层水平输送机构19、夹持升降机构中具有的动力设备与控制系统相接。
本实施例中,所述的控制系统具有六只传感器和一主控板,各传感器中,第一至第四传感器安装在机架的前部上,第五至第六传感器安装在机架的后部上,第一传感器8和第二传感器7的探测端朝向上层水平输送机构18前端部的上方区域,第三传感器21和第四传感器20的探测端朝向下层水平输送机构19前端部的上方区域,第五传感器16的探测端朝向上层水平输送机构18后端部的上方区域,第六传感器17的探测端朝向下层水平输送机构19后端部的上方区域,主控板22安装在机架14上,各传感器与主控板22相接,上层水平输送机构、下层水平输送机构、夹持升降机构中具有的动力设备与主控板相接。上述的各传感器均为光电传感器。
第一传感器8用于检测上层水平输送机构18上排在第一位的垃圾桶中是否装满垃圾,第二传感器7用于检测上层水平输送机构18前端部上是否有垃圾桶,第三传感器21用于检测下层水平输送机构19上排在第一位的垃圾桶中是否装满垃圾,第四传感器20用于检测下层水平输送机构19前端部上是否有垃圾桶,第五传感器16用于检测上层水平输送机构18后端部上是否有垃圾桶,第六传感器17用于检测下层水平输送机构19后端部上是否有垃圾桶。
本实施例中,机架14前部及后部上各有的一套夹持升降机构的组成相同,所述的每套夹持升降机构具有电机9、齿轮箱10、两条传动链4及两组转轴5,每组转轴5为四只,每套夹持升降机构具有的两组转轴5装于机架14上,两组转轴5对称布置在上层水平输送机构18及下层水平输送机构19的外侧,各转轴5上均装有链轮6,两传动链4分别装于两组转轴上的各链轮6上,传动链4的内侧上固定有挂杆15,齿轮箱10固定在机架14上,电机9的转轴与齿轮箱10的输入轴联接,齿轮箱10具有的两输出轴10a、10b上各装有一主动皮带轮11,每组转轴5中,有一转轴5上装有一从动皮带轮13,每一主动皮带轮10与一从动皮带轮13上装有传动皮带12,电机9与主控板22相接。
本实施例中,所述的上层水平输送机构18、下层水平输送机19构为均皮带输送机。
本实施例中,在下层水平输送机构的前方设有门扇3,门扇3的一侧与机架14的前端铰接,门扇3上开有投放窗口3a,投放窗口3a的边沿上铰接有窗扇1,窗扇1与机架14之间铰接有电动推杆2,在门扇23上装有读码器,读码器23及电动推杆2与主控板22相接。
结合图1、图2、图4、图5可见,启动机架14后部的夹持升降机构,在电机10的驱动下,一对传动链4逆时转动时,两者具有的挂杆15可勾住下层水平输送机构19后端部上的垃圾桶24两端的边沿,并将其提升到上层水平输送机构18后端部上,启动机架14前部的夹持升降机构,在电机10的驱动下,一对传动链4逆时转动时,两者具有的挂杆15可将上层水平输送机构18前端部上的垃圾桶24放到到下层水平输送机构19的前端部上。
结合图1、图2、图4、图5可见,本发明提供的垃圾桶更换装置在上层水平输送机构18、下层水平输送机构19上排列若干空垃圾桶24后使用时,用户由读码器23扫码认证后,电动推杆2将窗扇1打开,即可投放垃圾,经过一端时间,若没有人再投放垃圾,电动推杆2将窗扇1关闭;当第三传感器21检测到下层水平输送机构18上排在第一位的垃圾桶装满垃圾后,发出信息给主控板22,主控板启动两套夹持升降机构,上层水平输送机构18上排在第一位的垃圾桶被夹持在该机构的前下方,下层水平输送机构19上排在最后位的垃圾桶被夹持在该机构的后上方;当第二传感器7检测到上层水平输送机构18前端部上没有垃圾桶,第六传感器17检测到下层水平输送机构19后端部上没有垃圾桶时,发出信号给主控板22,主控板22得到信号启动上层水平输送机构18及下层水平输送机构19,使上层各垃圾桶向前方移动、下层的各垃圾桶向后方移动;当第四传感器20检测到下层水平输送机构19前端部上没有垃圾桶,第五传感器16检测到上层水平输送机构18后端部上没有垃圾桶,它们发出信号给主控板22,主控板22再次启动两套夹持升降机构,将被夹持在前方的垃圾桶24放在下层水平输送机构19前端部上,将被夹持在后方的垃圾桶24上层水平输送机构18后端部上,即可由下层水平输送机构19前端部上的垃圾桶继续接收投放垃圾。不断重复上述过程,当第一传感器8检测到上层水平输送机构18上排在第一位的垃圾桶中装满垃圾时,说明所有垃圾桶均已装满垃圾,第一传感器发出信号给主控板,主控板报警提示,然后,打开门扇3,将装满的垃圾桶移出,并更换上空的垃圾桶。
- 垃圾收集点垃圾桶更换的方法及装置
- 提示更换停车点的方法、装置及终端设备