一种清洁机器人系统
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及到智能清洁机器人领域,具体涉及到一种清洁机器人系统。
背景技术
现有的清洁机器人主要在地面上行走来进行吸尘清洁和拖地清洁,吸尘清洁主要通过设置风机来将地面的垃圾吸取到清洁机器人内的尘盒内进行收集,当清洁机器人工作一定时长时则需要倾倒处理尘盒内的垃圾;拖地清洁主要通过设置清洁件来对地面进行拖地清洁,清洁机器人工作一定时长是则需要对清洁件进行清洗。
为了提升用户体验效果,目前现有技术中针对尘盒内的垃圾倾倒和清洗清洁件的问题对应设置有基站,通过基站来实现吸取收集垃圾使得用户定期倾倒处理基站内的垃圾即可,通过基站来实现供水清洗清洁件并将清洗清洁件后的污水进行收集使得用户定期倾倒处理基站内的污水即可;但是还是存在用户要定期加清水和倾倒污水的问题;同时现有基站为了实现延长用户倾倒处理的周期,一般将基站内的清水箱和污水箱的容积设置较大,虽然可以延长用户添加清水和倾倒污水的频次,但是因清水箱和污水箱的容量较大导致重量大,不方便用户的提携使用;同时污水箱在收集污水中容易导致污水发臭进而污染室内环境,可见现有基站还存在上述缺陷待解决。
同时,现有基站将清洁件清洗完成后,清洁机器人会存在因电量不足而停止工作或位于基站上进行充电,或清洁机器人停靠在室内进行独立的充电,又或清洁机器人停止工作,在此过程中清洁件处于较为湿润的状态导致容易发霉、发臭,当清洁机器人停靠在基站时因清洗区内潮湿且清洁件上较为潮湿导致清洗区和清洁件很容易在高温环境中发臭、发霉,进而导致出现污染室内环境的问题,同时容易滋生细菌,当清洁件在室内地面上行走进行拖地时会污染室内地面,严重影响用户的使用效果。
同时,现有基站在收集污水和垃圾的过程中容易出现垃圾和污水不能充分混合的问题,导致容易出现扬尘的问题,同时需要在基站上的风机和污水箱之间设置过滤系统来对气流进行过滤,导致整体结构复杂且成本较高;以及存在在收集污水的过程中出现污水翻涌剧烈容易导致污水进入到风机内进而损坏风机的问题。
发明内容
本发明旨在至少在一定程度上解决上述相关技术中的技术问题之一。
为此,本发明的目的在于提供一种清洁机器人系统,主要解决现有清洁机器人清洁件容易发霉、发臭的问题,并解决现有基站收集污水中存在的容易扬尘和需要设置过滤系统的问题,以及解决收集污水中存在容易损坏风机的问题。
本发明的实施方式提供了一种清洁机器人系统,包括:清洁机器人,清洁机器人上设置有用于拖地的清洁件,还包括基站,基站上设置清洗区,当清洁机器人停靠在基站时清洁件位于清洗区且清洁件上吸附有清洗液或接触清洗液;还包括烘干模块,烘干模块至少用于对清洁件进行烘干,烘干模块至少包括发热件,发热件位于清洗区或清洁件的一侧来用于对清洁件进行烘干。
前述的一种清洁机器人系统,还包括水汽处理模块,水汽处理模块用于对清洁件在烘干过程中的至少部分水汽进行处理使得水汽进行流动。
前述的一种清洁机器人系统,水汽处理模块包括水汽排放通道,水汽排放通道的一端与清洗区或清洁件布相连通,水汽排放通道的另一端与基站的外部相连通来用于至少部分水汽通过水汽排放通道排出到基站外部;或水汽排放通道的另一端与清洁机器人的外部相连通来用于至少部分水汽通过水汽排放通道排出到清洁机器人外部。
前述的一种清洁机器人系统,水汽处理模块至少包括气流器,气流器位于清洁件或清洗区的一侧,当气流器工作时使得清洁件在烘干过程中的至少部分水汽进行流动来远离清洁件或清洗区。
前述的一种清洁机器人系统,水汽处理模块还包括气流通道,气流通道与气流器相连来用于对清洁件烘干过程中的至少部分水汽进行抽吸流动使得水汽远离清洁件或清洗区并进入到气流通道内;或气流通道与气流器相连来用于对清洁件烘干过程中的至少部分水汽进行吹动使得水汽远离清洁件或清洗区。
前述的一种清洁机器人系统,气流通道设置为至少部分朝向清洁件或朝向清洗区的开口结构,气流通道设置于清洁机器人上或设置于基站上。
前述的一种清洁机器人系统,当气流通道设置于清洁机器人上时,气流通道位于清洁件的上部或侧部,且当清洁机器人停靠在基站时气流通道与气流器对接相连通。
前述的一种清洁机器人系统,当气流通道设置于基站上时,气流通道位于清洗区上部或侧部,且气流器位于基站上与气流器相连通。
前述的一种清洁机器人系统,清洗区设置有悬杆,悬杆相对清洗区底部设置为悬空结构,当清洁机器人停靠在基站时悬杆接触拖布,当水汽处理模块工作时气流器与悬杆的下侧和清洗区底部的上侧之间的区域空间相连通来用于水汽的流动。
前述的一种清洁机器人系统,基站上设置有底壳,清洁件位于底壳的上侧,发热件安装于底壳上用于向底壳传导热量,底壳设置为导热材质制成的结构。
前述的一种清洁机器人系统,底壳上设置有凸起部,凸起部设置为相对底壳底部向上凸起的结构且当清洁件位于清洗区时形成凸起部接触清洁件的结构,发热件用于向凸起部传导热量并使得热量通过凸起部进入到清洁件上。
前述的一种清洁机器人系统,底壳设置为可拆卸地安装于清洗区上,且底壳与清洗区之间设置有软性结构的密封隔热件使得热量集聚在底壳上来对清洁件进行烘干。
前述的一种清洁机器人系统,清洗区上设置有接触清洁件的清洗件,发热件安装于清洗件上用于向清洗件传导热量使得热量通过清洗件进入到清洁件上,清洗件设置为导热材质制成的结构。
前述的一种清洁机器人系统,烘干模块还包括气流模块,气流模块位于清洗区的一侧,气流模块产生气流并使得气流朝向清洗区方向移动来对清洁件进行烘干。
前述的一种清洁机器人系统,清洗区上远离气流模块的一侧设置有气流排放通道,气流排放通道设置为向外与基站外部相连通的结构,或气流排放通道设置为与集污腔相连通的结构,或气流排放通道设置为通过动力机构与基站外部相连通的结构。
前述的一种清洁机器人系统,当清洁件位于清洗区上时清洁件与底壳及凸起部之间形成第一导流道来用于气流的通过。
前述的一种清洁机器人系统,清洗件设置为相对清洗区的底部向上伸出并接触清洁件的结构,清洗件上设置有分别接触清洁件不同位置的第一清洗部和第二清洗部,当清洁件位于清洗区上时清洁件、清洗区与第一清洗部和第二清洗部之间形成第二导流道来用于气流的通过。
前述的一种清洁机器人系统,清洗区上设置有气流道,气流道上设置有气流部,气流通过气流部至少朝向清洗区的侧部和/或上部方向移动。
前述的一种清洁机器人系统,气流道设置为沿清洁件外径方向延伸的通道结构,当清洁件设置为可旋转滚动的结构时气流道设置为至少贯穿清洁件长度方向上的一部分的通道结构使得气流通过气流部至少朝向清洁件长度方向上的两端和/或中端方向移动;或当清洁件设置为可水平旋转的结构时气流道设置为至少贯穿清洁件外沿至清洁件中心以内的清洁件区域呈通道结构使得气流通过气流部至少朝向清洁件外沿至清洁件中心之间的清洁件区域的部分区域方向移动。
前述的一种清洁机器人系统,发热件设置为管状结构的发热管或盘状结构的发热盘或发热丝结构其中的一种;或发热件设置为朝向清洁件方向安装并设置为可发热的灯珠结构,发热件设置为紫外线加热灯、红外线加热灯或陶瓷加热灯其中的一种。
前述的一种清洁机器人系统,烘干模块还包括温控单元,温控单元与控制模块电性连接,当温控单元检测到温度值达到预先设定的阈值A时则控制发热件停止加热或间歇加热。
前述的一种清洁机器人系统,基站上还设置有杀菌模块,杀菌模块至少位于清洗区的一侧来对清洗区和清洁件进行杀菌;和/或杀菌模块位于集污腔的一侧来对集污腔进行杀菌。
前述的一种清洁机器人系统,清洁机器人上设置有排尘口,基站上设置有集尘口,当清洁机器人停靠在基站时排尘口与集尘口位置对接,且基站上还设置有与集尘口相连通的来用于收集垃圾的集污腔。
前述的一种清洁机器人系统,集污腔内设置有用于引导垃圾进入到集污腔内的导污通道,导污通道与集尘口相连通且与集污腔的内部盛放清洗液的空间区域相连通,且当集污腔内盛放有清洗液时导污通道至少部分位于清洗液液面以下被清洗液浸没。
前述的一种清洁机器人系统,集污腔内设置有混合腔和气流腔,导污通道与混合腔相连通用于垃圾和清洗液在混合腔内进行混合,气流发生器与气流腔相连通来用于气流集聚后排出。
前述的一种清洁机器人系统,混合腔和气流腔之间设置为相连通的结构且设置有第一流通道并设置通过第一通道相连通;混合腔与气流腔之间设置有隔挡部,当隔挡部设置为在竖直方向上垂直或倾斜分布结构时第一通道位于隔挡部的上侧位置,或当隔挡部设置为在水平方向上平行或倾斜分布结构时第一通道位于隔挡部的左侧或右侧位置。
前述的一种清洁机器人系统,集污腔内设置有用于阻挡清洗液的挡污部,并将挡污部设置为与隔挡部呈一角度A的结构且设置为相对隔挡部呈向外伸出的结构。
前述的一种清洁机器人系统,集污腔与集尘口之间还设置有用于对垃圾进行分离的分离箱,分离箱上设置有垃圾入口和垃圾出口且设置垃圾出口与集污腔相连通以及设置垃圾入口与集尘口相连通;并设置垃圾出口位于分离箱的内部盛放空间的底面的上侧或位于垃圾入口的上侧来实现对不同重量大小的垃圾进行分离;或设置分离箱内设置有分离件且分离件上设置有分离孔来实现对不同体积大小的垃圾进行分离。
前述的一种清洁机器人系统,基站上还设置有用于供给清洗液的对接进液通道和/或设置有用于排放清洗液的对接排液通道;当基站上设置有对接进液通道时,对接进液通道与清洗区之间设置有进液模块,当进液模块工作时清洗液通过进液模块来供给清洗液;对接进液通道与清洗区设置为相连来通过进液模块用于向清洗区供给清洗液;或对接进液通道与基站上的蓄液腔设置为相连来通过进液模块用于向蓄液腔供给清洗液且蓄液腔与清洗区设置为相连并设置供液模块相连来用于向清洗区供给清洗液。
前述的一种清洁机器人系统,集污腔与清洗区相连用于清洗区内的清洗液进入到集污腔内进行收集;当基站上设置有对接排液通道时,对接排液通道与清洗区或与集污腔设置为相连通的结构用于向外排放清洗液;或对接排液通道与清洗区之间或与集污腔之间设置排液模块相连且当排液模块工作时通过排液模块来用于向外排放清洗液。
与现有技术相比,本发明具有如下有益效果:
本方案的基站能够实现对接吸取清洁机器人内的垃圾进入到基站进行收集盛放,并能够对清洁机器人上的清洁件进行清洗,以及对清洗清洁件后形成的污水进行收集盛放,使得基站具备多功能的使用效果,解决用户频繁倾倒尘盒垃圾和手动拆卸清洁件清洗的问题。
本方案的基站内设置烘干模块,通过烘干模块来实现清洁机器人上的清洁件进行烘干处理,当清洁机器人完成拖地清洁任务后基站对清洁件进行清洗,清洗完成后的清洁件通过烘干模块进行及时的烘干处理,使得清洁件在清洗后能保持干燥状态,解决清洁件在湿润状态下发霉、发臭的问题,以及解决清洁件在长期湿润状态下可靠性降低变得易损坏,同时解决清洁件污染室内环境的问题。
本方案的烘干模块可以直接利用发热件来对清洁件进行烘干处理,同时还可以设置气流模块来实现对清洁件进行提供带热量的气流来实现对清洁件的加速烘干处理,实现解决清洁件潮湿的问题。
本方案还设置有水汽处理模块,通过水汽处理模块来实现对清洁件在烘干过程中形成的水汽进行排出处理,起到加速烘干清洁件的效果,通过可以防止清洁件在烘干过程中的水汽扩散到基站上或清洁机器人上导致电子元器件受潮被损坏或烧坏的问题,有效的解决清洁件在烘干过程中水汽扩散的问题。
本方案针对水汽的处理,主要将水汽排放到基站外,通过设置水汽排放通道来引导水汽进行排出,放置水汽集聚在清洗区或清洁件上导致降低烘干速度,同时还可以设置气流器来实现对水汽提供动力进行排放,将水汽进行移动来远离清洗区和清洁件,实现加速排放水汽的效果,提供基站和清洁机器人的可靠性和安全性。
本方案的基站充分利用吸取收集的污水和垃圾进行混合实现利用收集的污水对气流进行过滤,使得气流中带动的垃圾能够充分混合到污水中进行混合过滤效果,解决扬尘问题,同时气流发生器和集污腔之间无需再设置过滤系统,使得基站的整体结构简单,成本更低。
本方案的基站的集污腔结构能够实现对垃圾充分引导进入到集污腔内,实现垃圾进入到集污腔内时能够及时的与污水进行混合,实现污水和垃圾的混合过滤效果,能够有效的解决集污腔扬尘的问题,且无需设置过滤系统。
本方案中集污腔内导污通道的结构能实现将垃圾及时引导与集污腔内的污水进行混合,防止垃圾不能及时有效的和污水混合导致出现扬尘、混合不充分的问题,实现垃圾和污水混合的充分可靠。
本方案的基站能够设置对接进液通道来实现自动添加清洗液即清水,通过对接进液通道及进液模块能够实现来自动供给清水到清洗区内进行用于清洁件的清洗,对接进液通道可以对接水龙头或水管来实现自动加清水,基站整体结构更简单,无需用户手动加清水,方便用户使用且提升用户体验效果。
本方案的基站能够设置对接排液通道来实现自动排放清洗液即污水,通过对接排液通道、排液模块能够实现自动将清洗清洁件后形成的污水进行排放,对接排液通道与下水道或地漏对接来实现对污水的排放,解决用于手动倾倒污水的问题,同时可以及时对污水进行向外排放,无效对污水进行收集存储,可以解决收集污水存储导致的发臭污染室内环境的问题。
本方案的基站内的集污腔设置混合腔和气流腔,通过混合腔实现垃圾和污水的充分混合,通过气流腔实现气流集聚后排出,能够有效的解决垃圾和污水无法充分混合的问题,同时能够防止污水在气流的吸力下翻涌进入气流发生器内导致气流发生器损坏的问题发生,提高了基站的可靠性,工作更稳定。
本方案还可以对应设置分离箱,通过设置分离箱来实现对垃圾的分离处理,实现重量小的或体积小的垃圾进入到集污腔内与污水进行充分混合,实现混合过滤效果,即为使得容易扬尘的垃圾与污水混合,有效解决扬尘问题,同时重量大的或体积大的垃圾被收集在分离箱内,分离箱不会扬尘,且方便用户倾倒,同时容易扬尘的垃圾和污水混合后在通过对接排液通道向外排出时不会堵塞,更容易向外排出,使得基站可靠性更高。
附图说明
图1为清洁机器人上清洁件旋转滚动示意及整体结构示意图;
图2为清洁机器人上清洁件水平旋转示意及整体结构示意图;
图3为基站的立体示意图;
图4为清洁机器人停靠在基站上的立体示意图;
图5为对清洁件进行烘干和排出水汽的示意图;
图6为对清洁件进行烘干和排出水汽的立体结构示意图;
图7为烘干模块设置清洗件来烘干和排出水汽的示意图;
图8为设置气流器来排出水汽的示意图;
图9为烘干模块设置气流模块来进行烘干的示意图;
图10为设置气流模块来进行烘干且设置气流道来供给气流进行烘干的示意图;
图11为基站内部的后侧整体结构示意图;
图12为基站内部的前侧整体结构示意图;
图13为基站上气流发生器来吸取垃圾进入集污腔进行混合的示意图;
图14为设置蓄液腔及对接进液通道来供给清洗液的示意图;
图15为分离箱的立体结构示意图;
图16为垃圾在气流下进入到分离箱内的示意图;
图17为垃圾在气流下进入到分离箱后进行分离后部分垃圾向外排出的示意图;
附图标记:1-清洁机器人,100-垃圾腔,101-排尘口,102-清洁件,103-门盖,2-基站,200-工作仓,2001-清洗区,2002-集尘口,201-集污腔,2011-混合腔,2012-气流腔,2013-第一通道,2014-隔挡部,2015-挡污部,202-气流发生器,203-发热件,204-底壳,2041-凸起部,2042-第一导流道,2043-悬杆,205-清洗件,2051-第一清洗部,2052-第二清洗部,2053-第二导流道,206-气流模块,207-气流排放通道,208-动力机构,209-气流道,210-气流部,211-导污通道,212-蓄液腔,213-分离箱,2131-垃圾入口,2132-垃圾出口,2133-分离件,214-对接进液通道,215-对接排液通道,216-进液模块,217-供液模块,218-排液模块,301-水汽排放通道,302-气流器,303-气流通道。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本发明。
实施例:本发明的一种清洁机器人系统,如图1至图17构成所示,本方案主要包括清洁机器人1和基站2,清洁机器人1用于在地面上行走来进行拖地清洁和吸尘清洁,将地面的垃圾吸取到清洁机器人1内的垃圾腔100内进行收集,利用清洁机器人1上的清洁件102来对地面进行拖地清洁,进而实现对室内地面的清洁处理;对应的,为了实现对清洁机器人1的停靠来对接收集清洁机器人1收集的垃圾和对清洁件102进行清洗,以及收集清洗清洁件102后形成的污水,本方案设置基站2,通过基站2来实现维护清洁机器人1,主要实现对清洁机器人1的对接吸取垃圾进行收集和供给清水来清洗清洁件102,以及完成清洁件102清洗后形成的污水进行收集,实现清洁机器人1和基站2的协同处理室内地面的脏污,方便用户使用。
可选地,可以将清洁件102设置为可以运动的结构,清洁件102可以设置为相对地面旋转滚动的结构,也可以为贴合地面水平旋转的结构,利用清洁件102的运动来实现对地面的大摩擦力拖地清洁效果,同时还能利用清洁件102运动的动力来实现清洁件102的清洗,当清洁件102接触清洗液即清水时此时可以利用清洁件102的运动的动力来实现清洁件102的清洗效果,本方案主要为清洁机器人1位于基站2上时基站2供给清水且清洁件102利用自身运动的动力来实现完成清洁件102的清洗和甩干,实现基站2对清洁机器人1上的清洁件102进行清洗处理。
针对对清洁件102的清洗,主要在基站2上设置清洗区2001,当清洁机器人1停靠在基站2时清洁件102位于清洗区2001且清洁件102上吸附有清洗液或接触清洗液;清洗区2001用于清洁件102的放置,当清洁机器人1行走到基站2上进行停靠时,清洁件102直接位于清洗区2001内,此时清洁件102可以为经过拖地清洁后使得清洁件102本身吸附有一定的清洗液,此时清洗液为污水,也可以为清洁件102位于清洗区2001后基站2提供清洗液即清水来使得清洁件102接触清水实现对清洁件102的清洗,但是不论是清洁件102吸附清洗液还是接触清洗液后使得清洁件102吸附有清洗液均能使得清洁件102呈湿润结构,此时可以对清洁件102来进行烘干处理。
针对清洁件102的烘干处理,主要为本方案中还包括烘干模块,烘干模块至少用于对清洁件102进行烘干,烘干模块提供一定的温度来形成至少对清洁件102进行烘干处理,湿润结构的清洁件102在具有一定温度的环境中能够使得清洁件102中的水分被蒸发形成水汽进而被烘干,其中,烘干模块至少包括发热件203,发热件203位于清洗区2001或清洁件102的一侧来用于对清洁件102进行烘干。
具体地,为了对清洁件102、清洗区2001其中任一个进行烘干处理,防止清洁件102或清洗区2001上因污水发霉、发臭导致污染室内环境,本方案的系统还包括烘干模块,当清洁件102位于清洗区2001内时,烘干模块至少用于对清洁件102进行烘干,清洗区2001内主要用于清洁件102清洗,清洁件102在清洗区2001内清洗会形成污水,虽然污水回被收集到集污腔201内或被排出到基站2外,但是清洁件102和清洗区2001上还是会残留一部分的污水,特别是清洁件102上会吸附部分污水使得清洁件102保持湿润的状态,当清洁件102长时间在湿润状态下时会容易出现发霉、发臭的问题,同时清洁件102在长时间的湿润下容易老化而容易损坏,此时有必要对清洁件102进行烘干处理,本方案通过设置烘干模块来实现对清洁件102和清洗区2001的烘干处理,主要对清洁件102进行烘干处理。
具体地,烘干模块包括发热件203,发热件203位于清洗区2001的一侧来用于对清洁件102进行烘干,发热件203发热来提供热量对清洗区2001上的清洁件102进行烘干处理,发热件203可以位于清洗区2001的左右一侧或前后一侧方向来对清洁件102进行烘干处理。
清洁件102在烘干处理的过程中,会形成一定的水汽,如果水汽不及时被处理排出,水汽会进入到基站2内部或清洁机器人1内部,这样会导致水汽引起电子元器件容易被损坏,同时容易引起基站2或清洁机器人1内的部分部件在水汽的接触出现生锈进而导致工作失效的问题;另外水汽在集聚的情况下还会出现冷凝水导致清洁件102难以被有效的烘干,为了能够处理烘干清洁件102过程中的水汽问题,本方案还还包括水汽处理模块,水汽处理模块用于对清洁件102在烘干过程中的至少部分水汽进行处理使得水汽进行流动,清洁件102在烘干过程中,水汽主要集中在清洗区2001内或者清洁件102附件区域内,水汽集聚下容易形成冷凝水然后滴落在清洁件102上导致清洁件102难以及时被烘干,同时水汽集聚导致清洁件102附件的湿度大难以有效的快速将清洁件102进行烘干,本方案的水汽处理模块通过将水汽进行流动来远离清洁件102或清洗区2001,实现烘干模块能快速将清洁件102进行烘干处理。
具体地,水汽处理模块包括水汽排放通道301,水汽排放通道301的一端与清洗区2001或清洁件102布相连通,使得水汽能够在产生的过程中进入到水汽排放通道301内,形成水汽排放通道301对水汽的集中引导效果,水汽排放通道301的另一端与基站2的外部相连通来用于至少部分水汽通过水汽排放通道301排出到基站2外部或水汽排放通道301的另一端与清洁机器人1的外部相连通来用于至少部分水汽通过水汽排放通道301排出到清洁机器人1外部;即可实现在烘干过程中形成的水汽在烘干过程中会进入到水汽排放通道301然后通过水汽排放通道301被排出到基站2外或清洁机器人1外,可以有效的防止水汽被聚集在清洗区2001或清洁件102附近。
为了进一步引导水汽远离清洗区2001或清洁件102,本方案的水汽处理模块至少包括气流器302,气流器302位于清洁件102或清洗区2001的一侧,当气流器302工作时使得清洁件102在烘干过程中的至少部分水汽进行流动来远离清洁件102或清洗区2001,气流器302可以为风机,气流器302产生气流的来带动水汽进行移动实现水汽远离清洗区2001或清洁件102,进而实现加水对清洁件102的烘干处理,及时将水汽进行排出处理。
可选地,为了更好的引导进入到水汽排放通道301内然后被排出,可以将气流器302设置为与水汽排放通道301相连通的结构,通过气流器302将水汽引导进入水汽排放通道301内然后向外排出,气流器302可以为提供产生气流的吸力来对水汽进行吸取进入到水汽排放通道301内后再进行向外排出,实现及时有效的处理水汽。
本方案的水汽处理模块还可以为设置包括气流通道303,气流通道303一端与清洗区2001或清洁件102位置相连通,另一端与基站2外部或清洁机器人1的外部相连通,气流通道303与气流器302相连来用于对清洁件102烘干过程中的至少部分水汽进行抽吸流动使得水汽远离清洁件102或清洗区2001并进入到气流通道303内;气流器302为风机来提供气流的吸力将水汽吸取到气流通道303内后然后通过气流通道303向外进行排出水汽;或气流通道303与气流器302相连来用于对清洁件102烘干过程中的至少部分水汽进行吹动使得水汽远离清洁件102或清洗区2001域,即为气流器302提供吹动的气流进入到气流通道303内后在气流通道303内形成集聚的吹动气流然后吹向清洗区2001或清洁件102方向使得集聚在清洗区2001或清洁件102附近的水汽被吹动来远离清洗区2001或清洁件102,吹动的水汽被排放到基站2外或清洁机器人1外,实现有效的通过吹动方式实现排放水汽;均可实现对水汽的处理效果。
可选地,气流通道303设置为至少部分朝向清洁件102或朝向清洗区2001的开口结构,气流通道303设置于清洁机器人1上或设置于基站2上,为了有利于水汽进入到气流通道303内,或者有利于气流通过气流通道303来对水汽进行吹动,将气流通道303设置为朝向清洁件102或清洗区2001的开口结构,实现更好的对水汽的处理效果,并可以将气流通道303设置在基站2上或清洁机器人1上,可以根据需要来设定具体的位置,只需满足有利于对水汽的处理即可。
优选的,气流通道303位于清洁件102的上部或侧部,更有利于通过气流通道303来对水汽进行引导或吹动处理进行排出。
其中,当气流通道303设置于清洁机器人1上时,气流通道303位于清洁件102的上部或侧部,气流通道303位于清洁件102的上部或侧部更有利于对水汽进行引导或吹动,因水汽在烘干模块的烘干处理下会朝向上方或朝向斜上方进行移动,且当清洁机器人1停靠在基站2时气流通道303与气流器302对接相连通,此时气流器302可以设置在基站2上,气流通道303设置在清洁机器人1上,当清洁机器人1停靠在基站2上时实现气流器302与气流通道303之间的对接相连通来实现对水汽的处理效果,更有利于对水汽的处理。
其中,当气流通道303设置于基站2上时,气流通道303位于清洗区2001上部或侧部,且气流器302位于基站2上与气流器302相连通,将气流通道303和气流器302均设置在基站2上实现相连通的结构,整体结构更简单,同时有利于对水汽的处理,因水汽在烘干模块的烘干处理下会朝向上方或朝向斜上方进行移动,气流通道303位于清洗区2001的上部或侧部更有利于对水汽进行引导或吹动,更有利于对水汽的处理。
为了提升气流器302对清洗区2001或清洁件102附近的水汽,清洗区2001设置有悬杆2043,悬杆2043相对清洗区2001底部设置为悬空结构,当清洁机器人1停靠在基站2时悬杆2043接触拖布,悬杆2043可以设置为柱形结构,悬杆2043位于清洗区2001上但是与清洗区2001的底部之间形成相互隔开的间隙结构,即为悬杆2043相对清洗区2001的底部为悬空结构,当水汽处理模块工作时气流器302与悬杆2043的下侧和清洗区2001底部的上侧之间的区域空间相连通来用于水汽的流动;即为悬杆2043的下侧和清洗区2001的底部的上侧之间可以用于气流的流动间隙,当气流器302工作时使得气流带动水汽可以通过悬杆2043的下侧与清洗区2001的底部的上侧之间来进行水汽的流动,减少对水汽流动的阻挡,有利于气流器302及时将水汽进行移动排放,实现清洗区2001内与清洁件102之间能够形成气流通过的循环路径,实现在气流器302的作用下整体排出水汽的效果更好。
烘干模块通过发热件203来进行烘干的一种结构为,基站2上设置有底壳204,底壳204上设置有软性结构的密封隔热件,清洁件102位于底壳204的上侧,发热件203安装于底壳204上用于向底壳204传导热量,底壳204设置为导热材质制成的结构,主要为底壳204安装在工作仓200上,底壳204通过密封隔热件安装在工作仓200上,底壳204形成清洗区2001来放置清洁件102,并将发热件203安装在底壳204上,发热件203发热后对底壳204传导热量使得底壳204整体形成具有一定热量来对清洁件102进行烘干处理,同时底壳204也是形成清洗区2001来盛放清洗液即为盛放清水,清洁件102在底壳204上进行清洗后形成污水,污水排放后清洁件102位于底壳204上,此时启动发热件203来对底壳204进行加热进而实现对清洁件102的烘干处理效果。
其中,清洁件102可以设置为接触底壳204的一部分的结构,实现底壳204对清洁件102的刮擦清洗效果,同时能够实现接触的部分进行热传导来对清洁件102进行接触传热烘干处理,同时有利于热量进入到清洁件102的内侧进行深度烘干处理,当清洁件102运动时,此时更有利于对清洁件102进行烘干处理。
可选地,底壳204设置为圆弧形的凹槽结构,此时清洁件102设置为旋转滚动的柱形结构,底壳204包覆清洁件102的侧部部分并形成包覆结构,能够使得底壳204形成对清洁件102的环形部分包覆来进行多方向的烘干处理效果,有利于快速对清洁件102进行烘干,同时烘干的温度更均匀、烘干面积更大,有利于提升清洁件102烘干的效率。
可选地,底壳204可以设置为容易传导热量的铝材质制成或铜材质制成。
烘干模块通过发热件203来进行烘干的另一种结构为,清洗区2001上设置有接触清洁件102的清洗件205,清洗件205与清洁件102接触形成刮擦结构,清洁件102运动时,清洁件102与清洗件205刮擦来进行清洗,使得清洁件102上的脏污更容易分离出到清水中形成污水,同时将发热件203安装于清洗件205上用于向清洗件205传导热量,清洗件205设置为导热材质制成的结构,发热件203加热对清洗件205传导热量,使得清洗件205接触清洁件102来进行直接传导热量对清洁件102进行烘干,同时因清洗件205会伸入到清洁件102中使得热量能深度进入到清洁件102内形成烘干效果,有利于提升将清洁件102烘干的时间。
可选地,清洗件205可以设置为容易传导热量的铝材质制成或铜材质制成。
烘干模块通过发热件203来进行烘干的再一种结构为,烘干模块还包括气流模块206,气流模块206为风机,气流模块206位于清洗区2001的一侧,气流模块206产生气流并使得气流朝向清洗区2001方向移动来对清洁件102进行烘干,气流模块206产生气流从清洗区2001的一侧即为清洁件102的一侧来对清洁件102进行吹动,同时和发热件203一起来形成热风对清洁件102进行吹动,具有温度的气流起到对清洁件102的流动烘干处理效果,有利于快速烘干清洁件102。
具体地,清洗区2001上远离气流模块206的一侧设置有气流排放通道207,气流排放通道207设置为向外与基站2外部相连通的结构,或气流排放通道207设置为与集污腔201相连通的结构,或气流排放通道207设置为通过动力机构208与基站2外部相连通的结构,通过气流排放通道207来将烘干清洁件102的过程中形成的蒸汽进行排放,防止蒸汽集聚进入到基站2内或清洁机器人1内导致电子元器件被损坏;可以有效的将烘干过程中的蒸汽排出到基站2外。
其中,可以为气流排放通道207直接设置为管道结构,并位于清洗区2001的另一侧与气流模块206形成相对的两侧,气流模块206对清洗区2001进行提供气流来吹动进行烘干,气流在气流模块206的作用下朝向气流排放通道207方向移动并使得气流带动蒸汽朝向气流排放通道207方向移动,进而实现蒸汽被排放到基站2外。
其中,还可以为气流排放通道207与集污腔201相连通,实现在烘干过程中的蒸汽沿管道进入到集污腔201内,蒸汽在集污腔201内遇到污水然后被冷凝,进而实现防止蒸汽集聚进入到基站2内或清洁机器人1内导致电子元器件被损坏。
其中,还可以为设置动力机构208,动力机构208为抽吸风机,通过风机来将蒸汽吸取到气流排放通道207并向基站2外排出,风机先将蒸汽抽吸到气流排放通道207内,然后在风机的动力下被排放到基站2外,进而实现防止蒸汽集聚进入到基站2内或清洁机器人1内导致电子元器件被损坏。
可选地,可以在底壳204上设置有凸起部2041,底壳204形成清洗区2001来放置清洁件102进行清洗,当清洁件102位于清洗区2001上时清洁件102与底壳204及凸起部2041之间形成第一导流道2042来用于气流的通过,因清洁件102的一部分接触凸起部2041,使得清洁件102和底壳204以及底壳204上的凸起部2041之间形成通道结构,该通道结构即为第一导流道2042,形成第一导流道2042为中通的结构,使得气流模块206产生的气流能够在第一导流道2042内集中对清洁件102进行吹动并在发热件203提供热量的情况下实现对清洁件102的集中烘干处理,同时第一导流道2042还用于在烘干过程中的蒸汽在第一导流道2042内移动被引导至气流排放通道207内向基站2外排出,不仅有利于提升烘干时间,还有利于防止烘干过程中的蒸汽扩散,整体取得更好的烘干效果,该方案中发热件203可以位于底壳204上,也可以设置发热件203位于清洗区2001的一侧来实现结合气流模块206提供气流的情况下形成热风吹向清洁件102方向。
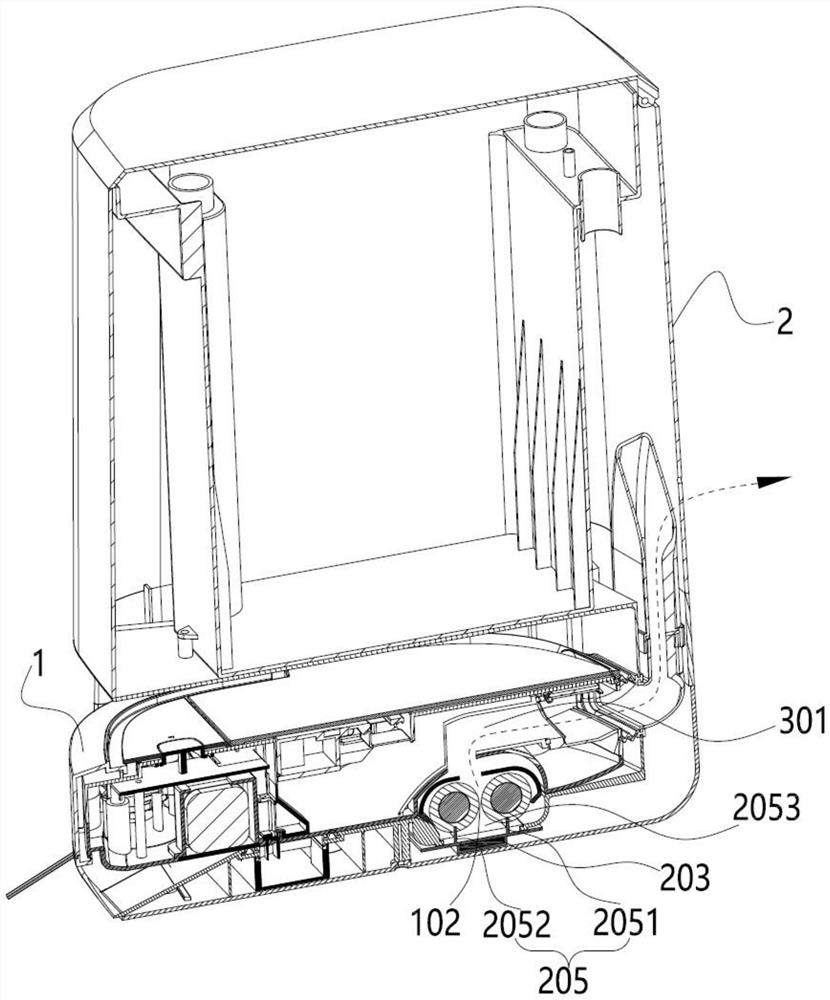
可选地,可以将清洗件205设置为相对清洗区2001的底部向上伸出并接触清洁件102结构,清洗件205上设置有分别接触清洁件102不同位置的第一清洗部2051和第二清洗部2052,当清洁件102位于清洗区2001上时清洁件102、清洗区2001与第一清洗部2051和第二清洗部2052之间形成第二导流道2053来用于气流的通过,清洗区2001用于盛放清水,清洗件205相对清洗区2001向上凸起来接触清洁件102形成刮擦清洗结构,当清洗完成后,清洁件102一直是与清洗件205接触,主要为清洁件102分别与第一清洗部2051和第二清洗部2052接触,此时清洁件102和清洗区2001以及第一清洗部2051和第二清洗部2052之间形成通道结构,该通道结构即为第二导流道2053,此时形成第二导流道2053为中通的结构,使得气流模块206产生的气流能够在第二导流道2053内集中对清洁件102进行吹动并在发热件203提供热量的情况下实现对清洁件102的集中烘干处理,同时第二导流道2053还用于在烘干过程中的蒸汽在第二导流道2053内移动被引导至气流排放通道207内向基站2外排出,不仅有利于提升烘干时间,还有利于防止烘干过程中的蒸汽扩散,整体取得更好的烘干效果,该方案中发热件203可以位于底壳204上,也可以设置发热件203位于清洗区2001的一侧来实现结合气流模块206提供气流的情况下形成热风吹向清洁件102方向。
为了更好的引导气流模块206产生的气流来吹向清洗区2001和清洁件102,本方案在清洗区2001上设置有气流道209,气流道209可以位于清洗区2001的左右一侧或前后一侧,气流道209设置为通道结构,气流道209上设置有气流部210,气流部210可以设置为孔状结构,多个气流部210分布在气流道209上,气流通过气流部210至少朝向清洗区2001的侧部和/或上部方向移动,气流进入到气流道209内后通过气流部210向清洗区2001和清洁件102方向进行吹动,实现能够更大范围的来对清洗区2001的侧部、上部方向形成吹动效果,并结合发热件203来实现烘干效果,该方案中发热件203可以位于底壳204上,也可以设置发热件203位于清洗区2001的一侧来实现结合气流模块206提供气流的情况下形成热风吹向清洁件102方向。
具体地,气流道209设置为沿清洁件102外径方向延伸的通道结构,使得气流能更大范围的来吹动清洁件102,当清洁件102设置为可旋转滚动的结构时气流道209设置为至少贯穿清洁件102长度方向上的一部分的通道结构使得气流通过气流部210至少朝向清洁件102长度方向上的两端和/或中端方向移动;即为当清洁件102为柱形结构,此时清洁件102可以在地面上旋转滚动,气流道209沿清洁件102的长度方向贯穿来形成一定长度范围内的通道结构,实现能对清洁件102的整个长度方向上的两端、中端进行吹动,实现对清洁件102的大面积方向进行吹动,在结合发热件203提供热量的前提下,实现对清洁件102的多方向的烘干处理效果,有利于提升烘干时间,同时能够及时吹动烘干过程中的蒸汽被排出。
具体地,又或当清洁件102设置为可水平旋转的结构时气流道209设置为至少贯穿清洁件102外沿至清洁件102中心以内的清洁件102区域呈通道结构使得气流通过气流部210至少朝向清洁件102外沿至清洁件102中心之间的清洁件102区域的部分区域方向移动;即为清洁件102为柱形结构且贴合地面水平旋转,气流道209沿清洁件102的外沿周向方向贯穿,并至少贯穿清洁件102外沿至清洁件102中心区域位置呈通道结构,气流进入到气流道209内并通过气流部210朝向清洁件102的外沿至中心之间的至少部分区域位置进行吹动,实现大面积吹动效果,结合发热件203提供热量的前提下,实现对清洁件102的多方向的烘干处理效果,有利于提升烘干时间,同时能够及时吹动烘干过程中的蒸汽被排出。
可选地,针对发热件203的结构,发热件203设置为管状结构的发热管或盘状结构的发热盘或发热丝结构其中的一种;如发热件203可以设置为发热管、发热盘、发热片,如PET发热片等能够发热的元件,通过发热件203来提供热量进行烘干处理。
针对发热件203的一种结构,针对发热件203的一种结构,发热件203设置为朝向清洁件102方向安装并设置为可发热的灯珠结构,发热件203设置为紫外线加热灯、红外线加热灯或陶瓷加热灯其中的一种。
为了控制烘干模块的烘干温度,防止过热导致基站2损坏,本方案的烘干模块还包括温控单元,温控单元与控制模块电性连接,当温控单元检测到温度值达到预先设定的阈值A时则控制发热件203停止加热或间歇加热,烘干模块工作来进行烘干处理,发热件203启动工作持续升温来提供进行烘干的温度,温控单元持续检测温度,当检测到温度达到设定的阈值A温度数值时,则控制发热件203停止加热或者变更为间歇加热的模式来进行加热,防止发热件203因加热温度过高导致出现过热引起基站2损坏。
可选地,阈值A设置为40-70摄氏度之间的温度数值,可以有效的来进行烘干处理的过程中防止过热导致出现损坏基站2的问题。
可选地,温控单元可以为检测发热件203的温度数值,或者设置为检测清洗区2001内的温度数值,当检测到的温度数值达到设定的阈值A温度数值时,则控制发热件203停止加热或者变更为间歇加热的模式来进行加热。
本方案的基站2除了具备来针对清洁件102进行清洗的功能外,即为提供清洗区2001来放置清洁件102并提供清洗液来清洗清洁件102的功能外,还可以具备吸取垃圾进行收集的功能,主要为基站2工作将清洁机器人1内的垃圾吸取到基站2内进行收集,用户定期处理基站2内的垃圾即可,减少用于倾倒处理垃圾的频次。
针对基站2的对接集尘功能部分,清洁机器人1结构部分具体为,本方案的一种清洁机器人系统,清洁机器人1上设置有收集垃圾的垃圾腔100,垃圾腔100的一侧连接设置有排尘口101,清洁机器人1上还设置有用于拖地的清洁件102,垃圾腔100用于收集吸取的地面垃圾,垃圾腔100和排尘口101设置为相通的结构,排尘口101上设置门盖103来可旋转地开闭排尘口101,可以设置弹性件来实现门盖103的复位效果来关闭排尘口101,当基站2工作时门盖103旋转来打开排尘口101即可实现垃圾在气流的吸力作用下从垃圾腔100随气流移动来通过排尘口101向外排出,主要通过排尘口101进入到基站2上的集尘口2002内进而实现对接垃圾进行收集。
基站2结构部分具体为,基站2用于清洁机器人1的停靠,基站2设置为相对清洁机器人1为独立的部分;其中,基站2上设置有工作仓200,工作仓200用于支撑清洁机器人1来用于清洁机器人1的停靠,工作仓200可以设置凹陷的槽型结构来容纳清洁机器人1,工作仓200上设置有清洗区2001和集尘口2002,清洗区2001用于放置清洁机器人1的清洁件102,当清洁机器人1停靠在基站2上时,排尘口101与集尘口2002位置对接,清洁件102位于清洗区2001内;此时基站2启动工作可以来对接吸取垃圾进行收集和供给清洗液来清洗清洁件102。
针对垃圾的收集,在基站2上还设置有集污腔201,集污腔201分别与气流发生器202和集尘口2002相连用于垃圾在气流的吸力下从集尘口2002进入到集污腔201内进行收集;集污腔201与气流发生器202相连通来用于气流从集污腔201进入到气流发生器202内后排出,集污腔201与集尘口2002通过管道连通来用于垃圾从集尘口2002进入到集污腔201内进行收集,气流发生器202工作产生较大的气流的吸力来吸取垃圾从集尘口2002进入进而实现对垃圾的对接吸取收集效果。
可选地,集污腔201设置为包覆的腔体结构,或者箱体结构,只需要实现集污腔201收集盛放清洗液即可。
其中,基站2中的气流发生器202设置为大功率的风机,大功率的风机能够产生较大的气流的吸力来吸取垃圾并带动垃圾移动进入到基站2内,提升基站2吸取垃圾的可靠性。
为了解决清洁件102或集污腔201导致污染室内环境的问题,基站2上还设置有杀菌模块,杀菌模块至少位于清洗区2001的一侧来对清洗区2001和清洁件102进行杀菌,即为杀菌模块与控制模块电性连接来控制杀菌模块的启动、停止和工作时间,进而实现杀菌模块来对清洗区2001和清洁件102进行杀菌,防止清洗区2001和清洁件102上残留污水导致滋生细菌而发霉发臭污染环境,可以将杀菌模块安装在清洗区2001的底部或侧部位置,杀菌模块朝向清洁件102方向和清洗区2001内的方向,实现对清洁件102和清洗区2001的有效杀菌效果。和/或杀菌模块位于集污腔201的一侧来对集污腔201进行杀菌,使得杀菌模块朝向集污腔201方向进行杀菌。
可选地,可以在设置多个杀菌模块,其中的部分杀菌模块位于清洗区2001的一侧来对清洗区2001和清洁件102进行杀菌,其中的另外部分的杀菌模块位于集污腔201的一侧来对集污腔201进行杀菌,因集污腔201内要收集污水和垃圾,可以有效的将集污腔201内的污水和垃圾混合物进行杀菌,防止集污腔201发霉、发臭,体验用户的使用体验效果。
其中,杀菌模块可以为UV灯或UV灯管或红外灯或紫外灯其中的一种。
可选地,杀菌模块可以为臭氧发生器,利用臭氧进行杀菌处理。
为了更好的引导垃圾进入到集污腔201内后及时与清洗液进行混合,本方案还可以为在集污腔201内设置有用于引导垃圾进入到集污腔201内的导污通道211,导污通道211与集尘口2002相连通且与集污腔201的内部盛放清洗液的空间区域相连通,且当集污腔201内盛放有清洗液时导污通道211至少部分位于清洗液液面以下被清洗液浸没;导污通道211与集尘口2002通过管道相连通,导污通道211可以位于集污腔201内的侧部位置,垃圾从集尘口2002进入进入到导污通道211内后能够及时与清洗液进行接触混合,实现清洗液对垃圾的接触混合和对气流的过滤效果,并使得垃圾在进入到集污腔201内时先在导污通道211内与清洗液进行接触混合,可以有效地防止垃圾分散或者飞扬的问题,防止出现垃圾无法及时与清洗液混合导致扬尘的问题,使得垃圾和清洗液能够及时有效的进行充分混合,以及充分对气流进行过滤。
可选地,本方案可以设置为清洗区2001通过导污通道211与集污腔201相连通来用于清洗区2001内的清洗液通过导污通道211进入到集污腔201内,清洗区2001可以通过管道与集污腔201相连通,主要清洗区2001通过管道与导污通道211相连通并通过导污通道211实现与集污腔201相连通来用于吸取清洗区2001内的污水进入到集污腔201内;实现通过导污通道211来将清洗区2001内的清洗液即污水吸取到集污腔201内进行收集,气流发生器202在工作时能够实现同时吸取清洁机器人1内的垃圾腔100内的垃圾和吸取清洗区2001内的污水一起朝向集污腔201内进行收集,实现垃圾和污水的充分及时混合效果。
为了实现在收集垃圾和污水的过程中实现垃圾和污水的充分混合,以及为了实现对气流的充分过滤和防止污水翻涌剧烈导致进入气流发生器202而损坏气流发生器202,本方案的集污腔201内设置有混合腔2011和气流腔2012,导污通道211与混合腔2011相连通用于垃圾和清洗液在混合腔2011内进行混合,气流发生器202与气流腔2012相连通来用于气流集聚后排出,气流腔2012主要用于气流从混合腔2011进入到气流腔2012内积聚后排出以及用于盛放清洗液即垃圾和污水的混合物,其中,主要将导污通道211与混合腔2011相连通用于垃圾和清洗液在混合腔2011内进行混合,垃圾在气流的吸力作用下主要进入到混合腔2011内进行充分的混合,此时混合腔2011内的垃圾和污水会出现一定的翻涌状态,但是翻涌的污水均被限制在混合腔2011内进行充分的混合,翻涌的污水在翻涌的状态下不会翻涌进入到气流腔2012内,还主要将气流发生器202与气流腔2012相连通来用于气流集聚后排出,实现气流腔2012内虽然盛放有污水和垃圾的混合物,但是因气流在气流腔2012内集且位于垃圾和污水混合物的上部分集聚,不会因气流引起污水的翻涌,可见通过设置混合腔2011和气流腔2012实现混合腔2011内翻涌进行充分混合,而气流腔2012内不会出现翻涌状态,气流在气流腔2012内集聚后会通过气流发生器202向外排出,排出的气流因在混合腔2011内混合过滤,使得气流中的垃圾或灰尘被污水混合,气流排出到基站2外不会污染室内环境。
其中,气流腔2012内因污水不会出现翻涌状态,则不会出现污水翻涌进入到气流发起器内导致气流发生器202损坏的问题,提高了基站2的可靠性和安全性。
具体地,混合腔2011和气流腔2012之间设置为相连通的结构且设置有第一通道2013并设置通过第一通道2013相连通,实现气流将垃圾吸取到混合腔2011内与污水混合后以及气流在污水中过滤后气流分离出通过第一通道2013从混合腔2011内进入到气流腔2012;其中,在混合腔2011与气流腔2012之间设置有隔挡部2014,隔挡部2014将集污腔201分为两个独立的腔体结构,一个腔体为混合腔2011,一个腔体为气流腔2012,混合腔2011与气流腔2012为独立的腔体结构但是又相互连通;当隔挡部2014设置为在竖直方向上垂直或倾斜分布结构时第一通道2013位于隔挡部2014的上侧位置,使得气流在污水中过滤后向上移动通过第一通道2013进入到气流腔2012内进行集聚后排出;当隔挡部2014设置为在水平方向上平行或倾斜分布结构时第一通道2013位于隔挡部2014的左侧或右侧位置,使得气流在污水中过滤后沿隔挡部2014方向移动并通过左侧或右侧的第一通道2013向上进入到气流腔2012内集聚后排出,方便气流从混合腔2011进入到气流腔2012内,同时能够实现气流在混合腔2011内的污水中被充分过滤。
其中,混合腔2011与气流腔2012之间的底部设置为相通的结构,可以设置通孔来实现相连通,使得混合腔2011内的清洗液能够通过通孔进入到气流腔2012内,实现气流腔2012存储清洗液,使得混合腔2011能够和气流腔2012保持一致的液位高度,混合腔2011实现垃圾和污水充分混合,气流从第一通道2013内进入到气流腔2012内,同时混合腔2011内的污水从通孔进入到气流腔2012内进行盛放,但是气流腔2012内的气流均位于气流腔2012内的液面以上,气流不对污水形成冲击,这样使得气流腔2012内的污水能够保持平稳不翻涌,进而将污水的翻涌限制在混合腔2011内。
为了防止在收集污水的过程中污水在气流的吸力下翻涌进入到气流发起器内导致气流发生器202损坏的问题发生,本方案的集污腔201内设置有用于阻挡清洗液的挡污部2015,即阻挡污水的挡污部2015,并将挡污部2015设置为与隔挡部2014呈一角度A的结构且设置为相对隔挡部2014呈向外伸出的结构;角度A大于小于度,使得挡污部2015与隔挡部2014呈一定角度的夹角,集污腔201内的清洗液即污水在气流的吸力下翻涌,翻涌的污水会被隔挡部2014隔挡并形成沿隔挡部2014翻涌移动,当翻涌的污水遇到挡污部2015时会被挡污部2015阻挡并形成回落,使得有利于降低污水翻涌的状态,并防止污水朝向气流发生器202方向移动导致进入到气流发生器202内,可以有效地防止气流发生器202出现因污水进入而损坏的问题出现。
可选地,挡污部2015设置为朝向集污腔201的下部和/或侧部方向延伸的凸起结构,有利于挡污部2015对污水的阻挡效果并形成回落效果。
其中,当隔挡部2014设置为在竖直方向垂直或倾斜分布结构时,此时挡污部2015沿水平方向平行或倾斜分布,使得挡污部2015与隔挡部2014呈一角度A来形成对污水的阻挡效果。
其中,当隔挡部2014设置为在水平方向上平行或倾斜的分布结构时,此时挡污部2015沿在竖直方向垂直或倾斜分布,使得挡污部2015与隔挡部2014呈一角度A来形成对污水的阻挡效果。
可选地,为了实现对垃圾腔100进入到基站2内的垃圾进行分离,主要防止较大的垃圾堵塞对接排液通道215或堵塞下水道问题发生,本方案的基站2上的集污腔201与集尘口2002之间还设置有用于对垃圾进行分离的分离箱213,分离箱213上设置有垃圾入口2131和垃圾出口2132且设置垃圾出口2132与集污腔201相连通以及设置垃圾入口2131与集尘口2002相连通;垃圾入口2131可以通过管道与集尘口2002相连通,垃圾出口2132可以通过管道与集污腔201相连通,可以为垃圾出口2132与导污通道211相连通进而实现与集污腔201相连通,实现当清洁机器人1停靠在基站2上对接吸取垃圾时,垃圾从清洁机器人1内的垃圾腔100内在气流发生器202的气流的吸力下被气流带动移动,然后垃圾通过排尘口101进入到集尘口2002并通过垃圾入口2131进入到分离箱213内,垃圾在分离箱213内进行分离后,部分垃圾(体积小的或重量小的垃圾)在气流的吸力作用下通过垃圾出口2132进入到集污腔201内进行与污水混合,部分垃圾(体积大的或重量大的垃圾)被收集在分离箱213内,使得集污箱内主要将容易扬尘的垃圾和污水进行混合,集污腔201内的垃圾和污水的混合物可以直接通过堆积排液通道向外排出,且不会出现堵塞问题,因集污腔201内没有收集体积大的或者重量大的垃圾,因此集污腔201内的垃圾和污水很容易通过对接排液通道215向外排出。
针对分离箱213具体的分离结构,一种结构方式为,设置垃圾出口2132位于分离箱213的内部盛放空间的底面的上侧或者垃圾出口2132位于垃圾入口2131的上侧来实现对不同重量大小的垃圾进行分离;即为垃圾在气流的吸力作用下从垃圾入口2131进入到分离箱213内,因垃圾出口2132位于分离箱213的内部盛放空间的底面的上侧或者垃圾出口2132位于垃圾入口2131的上侧,此时垃圾需要在气流的吸力下向上移动一定的距离位移来到达垃圾出口2132进而通过垃圾出口2132,其中,重量小的垃圾在气流的吸力下较为容易的向上运动来通过垃圾出口2132向外进入到集污腔201内,而重量大的垃圾在气流的吸力下且因受到自身重力的限制导致无法向上运动至垃圾出口2132位置,进而在重力作用下掉落在分离箱213内的内部盛放空间区域的底部区域被收集在分离箱213内,进而实现分离箱213对垃圾的分离效果,使得容易扬尘的垃圾进入到集污腔201内与污水混合,方便集污腔201内的垃圾和污水的混合物更容易通过对接排液通道215向外排出,同时分离箱213和集污腔201都不会出现扬尘的问题,方便用户使用。
针对分离箱213具体的分离结构,另一种结构方式为,设置分离箱213内设置有分离件2133且分离件2133上设置有分离孔来实现对不同体积大小的垃圾进行分离。
优选地,分离箱213设置为可拆卸地安装在基站2上,方便用户取放分离箱213来进行倾倒处理分离箱213内的垃圾。
为了实现对基站2的自动加清水和自动排污水的功能,解决人为手动加清水和手动倾倒污水的问题,本方案的基站2上还设置有用于供给清洗液的对接进液通道214和/或设置有用于排放清洗液的对接排液通道215,对接进液通道214可以与水龙头或水管对接来实现自动加入清水,对接排液通道215可以与下水道或地漏对接来实现自动排放污水,实现基站2的自动加水和自动排污效果,方便用户使用。
针对基站2上来实现加清洗液即加清水的结构部分,本方案的基站2上设置有对接进液通道214,当基站2上设置有对接进液通道214时,对接进液通道214与清洗区2001之间设置有进液模块216,当进液模块216工作时清洗液通过进液模块216来供给清洗液;主要在对接进液通道214与清洗区2001之间设置有进液模块216,当进液模块216工作时清洗液从对接进液通道214进入并通过进液模块216,对接进液通道214用于对接水龙头或水管来实现供给清水,进液模块216设置在对接进液通道214与清洗区2001之间,进液模块216可以设置为电磁阀,当进液模块216工作时实现对接进液通道214与清洗区2001相连通,此时水龙头或水管内的清水能够通过进液模块216进入到清洗区2001内实现对清洗区2001内供给清水来用于清洁件102的清洗。
具体地,对接进液通道214与清洗区2001设置为相连来通过进液模块216用于向清洗区2001供给清洗液;可以设置对接进液通道214与清洗区2001相连且当进液模块216工作时使得对接进液通道214与清洗区2001之间相连通来对清洗区2001供给清洗液;即为对接进液通道214直接与清洗区2001相连,当进液模块216工作时直接使得清洗区2001与对接进液通道214相连通来用于将清水供给到清洗区2001内,即为基站2内不设置储存清水的其他部分,针对清洁件102的单次清洗对应进液模块216工作单次实现供给清水到清洗区2001内,可以实现基站2的整体结构简单。
具体地,对接进液通道214与基站2上的蓄液腔212设置为相连来通过进液模块216用于向蓄液腔212供给清洗液且蓄液腔212与清洗区2001设置为相连并设置供液模块217相连来用于向清洗区2001供给清洗液,当进液模块216工作时使得对接进液通道214与蓄液腔212之间相连通来对蓄液腔212供给清洗液,即为在基站2上设置蓄液腔212,蓄液腔212用于盛放清水,蓄液腔212内清水的清水可以用于清洁件102的多次清洗,对接进液通道214与蓄液腔212相连,蓄液腔212与清洗区2001相连,进液模块216工作时实现清水通过对接进液通道214进入到蓄液腔212内,实现对蓄液腔212内自动加水效果,当基站2需要对清洁件102进行清洗时,此时再将蓄液腔212内的清水供给到清洗区2001内,可以实现定期自动添加清水的效果,降低进液模块216的工作频次,方便用户使用。
其中,针对蓄液腔212与清洗区2001之间设置有供液模块217,当供液模块217工作时蓄液腔212与清洗区2001之间相连通使得蓄液腔212内的清洗液供给到清洗区2001内,即为对接进液通道214将清水供给到蓄液腔212内实现对蓄液腔212定期加清水,当基站2需要清洗清洁件102时,此时供液模块217启动工作将蓄液腔212内的清水供给到清洗区2001内,蓄液腔212内的清水可以实现对清洁件102的多次清洗效果,供液模块217可以设置为电磁阀或水泵来实现对清洗区2001进行供给清水。
可选地,进液模块216设置为电磁阀结构,供液模块217可以设置为水泵结构或电磁阀结构,可以控制供给清洗液的时间和启动停止。
针对对清洗区2001内清洗清洁件102后形成的污水的排放部分,基站2上设置有对接排液通道215,集污腔201与清洗区2001相连用于清洗区2001内的清洗液进入到集污腔201内进行收集;当基站2上设置有对接排液通道215时,对接排液通道215与清洗区2001或与集污腔201设置为相连通的结构用于向外排放清洗液;对接排液通道215与清洗区2001或与集污腔201相连通用于清洗区2001内的清洗液通过对接排液通道215向外排出,对接排液通道215用于与下水道对接来用于清洗区2001内的污水通过对接排液通道215排排入到下水道内,对接排液通道215能够将清洗区2001内的污水或集污腔201内的污水直接排放到下水道内,污水可以在自然状态下进行流动进入到对接排液通道215内,清洁件102在清洗的过程中实现污水流动进入到对接排液通道215内,实现清洁件102与污水的及时分离,实现清洗区2001内形成污水后能够及时排放到下水道内,用户无需单独来针对污水进行倾倒处理,方便用户使用,因污水能够及时排到下水道内被排走,基站2上不储存污水这样使得基站2不会污染室内环境,解决现有基站2上收集污水在较长时间存放下会发臭导致污染室内环境的问题。
其中,针对污水的排放,还可以在对接排液通道215与清洗区2001之间或与集污腔201之间设置排液模块218相连且当排液模块218工作时通过排液模块218来用于向外排放清洗液,对接排液通道215与清洗区2001之间或与集污腔201之间安装有排液模块218,当排液模块218工作时使得清洗区2001或集污腔201与对接排液通道215之间相连通来使得清洗液通过对接排液通道215向外排出,通过设置排液模块218来对污水提供动力进行排出,排液模块218可以设置为电磁阀结构或水泵结构,有利于设置清洗区2001与对接排液通道215之间的位置布局,形成排液模块218对污水提供动力来进行污水排出,有利于有效排出污水,防止污水残留或积液问题出现。
工作原理:本方案的清洁机器人系统,包括清洁机器人1和基站2,清洁机器人1在地面上行走进行吸尘清洁来吸取收集垃圾和进行拖地清洁来处理地面脏污,基站2用于清洁机器人1的停靠,当清洁机器人1停靠在基站2上时此时基站2启动工作来对接吸取垃圾进行收集和针对脏污的清洁件102进行清洗并将清洗后形成的污水进行收集,同时还能启动烘干模块来对清洁件102进行烘干处理,通过烘干模块的烘干处理能有效的防止清洁件102在湿润状态下发霉、发臭,防止清洁件102在长期湿润状态下可靠性降低变得易损坏,防止清洁件102污染室内环境,有效的实现对清洁件102的烘干处理,同时通过水汽处理模块来实现对清洁件102烘干过程中的水汽进行处理,基站2在收集污水和垃圾的过程中充分利用污水来实现对气流的过滤,实现气流发生器202与集污腔201之间无需设置任何过滤系统即可将气流排出到基站2外且不会污染室内环境;同时基站2内可设置的对接进液通道214来对清洗区2001加清水,以及基站2内的污水和垃圾可以通过对接排液通道215向外排出,实现基站2的自动加清水和自动排污水的功能,基站2无需人为参与加清水或倒污水,方便用户使用进而提升用户体验效果。
本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围,均在本发明的保护范围内。
- 清洁机器人基站、清洁机器人以及清洁机器人系统
- 一种清洁机器人控制系统及控制清洁机器人的方法