一种实验鼠监测系统
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及实验装置技术领域,尤其涉及一种实验鼠监测系统。
背景技术
在饲养实验鼠时,精确控制实验鼠的进食进水以及实时监控实验鼠的行为是保证试验精度的重要环节。
在相关技术中,通常通过对食物的称量来反向推测小鼠的进食量。然而,这种方法存在一定的误差。由于实验鼠的饮食习性,食物被实验鼠咀嚼后,部分食物成粉末状搂在垫料上,如果仅测量食物重量的差异来计算进食量会存在较大误差。此外,一些特殊试验料(比如高脂食物)需要进行低温保存,然而常规实验鼠龙一般处于常温,若不对特殊试验料进行更换,则特殊试验料容易产生变质;若对特殊试验料进行频繁更换,则会影响实验鼠的行为,进而不易控制试验变量。
在相关技术中,通常通过对饮水瓶的称量来反向推测小鼠的进食量。然而,这种方法存在一定的缺陷。由于需要对实验鼠的每小时和/或每天进水量进行计算,需要反复对饮水瓶进行称量,不仅增加了试验人员的工作量,而且还增加了影响实验鼠状态的变量。
此外,在对实验鼠进行代谢相关的试验中,试验人员一般会着重关注实验鼠的运动状态。然而目前的代谢笼价格昂贵,结构复杂,每个代谢笼仅能观测单支实验鼠,并且无法做到连续一周以上的检测。
目前,针对相关技术中,存在饮食饮水监测不准确、无法连续监测小鼠运动状态的问题,尚未提出有效的解决方案。
发明内容
本发明的目的是针对现有技术中的不足,提供一种实验鼠监测系统,以至少解决相关技术中饮食饮水监测不准确、无法连续监测小鼠运动状态的问题。
为实现上述目的,本发明采取的技术方案是:
一种实验鼠监测系统,包括:
箱体;
体重监测单元,所述体重测量单元设置于所述箱体的内部,所述体重测量单元包括:
至少一第一容纳空间,所述第一容纳空间设置有至少一第一开口,所述第一容纳空间的体积仅能容纳一只实验鼠;
至少一第一压力传感器,所述第一压力传感器设置于所述第一容纳空间的底部;
至少一第一通信传感器,所述第一通信传感器设置于所述第一容纳空间的顶部和/或侧部;
饮水单元,所述饮水监测单元设置于所述箱体,所述饮水单元包括:
至少一储水容器,所述储水容器设置于所述箱体的外部或所述箱体的内部;
至少一饮水管,所述饮水管的第一端与所述储水容器连接,所述饮水管的第二端位于所述箱体的内部,且所述饮水管的第二端低于所述饮水管的第一端设置;
至少一第二容纳空间,所述第二容纳空间设置于所述饮水管的第二端,且所述饮水管的第二端位于所述第二容纳空间的内部,所述第二容纳空间设置有至少一第二开口,所述第二容纳空间的体积仅能容纳一只实验鼠;
至少一第二压力传感器,所述第二压力传感器设置于所述第二容纳空间的底部;
至少一第二通信传感器,所述第二通信传感器设置于所述第二容纳空间的顶部和/或侧部;
饮食单元,所述饮食监测单元设置于所述箱体的内部,所述饮食单元包括:
储食容器,所述储食容器设置于所述箱体的外部或所述箱体的内部;
至少一第三容纳空间,所述第三容纳空间设置于所述箱体的内部,并与所述储食容器连接,所述第三容纳空间设置有至少一第三开口,所述第三容纳空间的体积仅能容纳一只实验鼠;
挡板,所述挡板转动地设置于所述第三容纳空间的底部;
至少一第三压力传感器,所述第三压力传感器设置于所述挡板的底部;
至少一第三通信传感器,所述第三通信传感器设置于所述第三容纳空间的顶部;
轨迹监测单元,所述轨迹监测单元设置于所述箱体的内部,所述轨迹监测单元包括:
若干第四通信传感器,若干所述第四通信传感器分布设置于所述箱体的内部;
若干图像传感器,若干所述图像传感器分布设置于所述箱体的内部,且一所述第四通信传感器的周围设置至少一所述图像传感器;
食物回收单元,所述食物回收单元设置于所述箱体的内部,并位于所述储食单元的下部且对准所述挡板;
控制单元,所述控制单元设置于所述箱体的内部和/或所述箱体的外部,并与所述体重监测单元、所述饮水单元、所述饮食单元以及所述轨迹监测单元通信连接。
在其中的一些实施例中,所述饮水单元还包括:
球形体,所述球形体嵌设于所述饮水管的第二端的内部,且所述球形体的半径大于所述饮水管的第二端的半径;
其中,在施加外力于所述球形体的情况下,所述球形体沿所述饮水管由所述饮水管的第二端向所述饮水管的第一端滚动一段距离,以使所述饮水管的饮用水由所述饮水管的第二端流出;在施加于所述球形体的外力被撤销的情况下,所述球形体沿所述饮水管向所述饮水管的第二端滚动,并堵住所述饮水管的第二端,以使所述饮水管的饮用水无法由所述饮水管的第二端流出。
在其中的一些实施例中,所述饮食单元还包括:
温度控制模组,所述温度控制模组设置于所述储食容器,并与所述控制单元通信连接,用于调节所述储食容器的温度。
在其中的一些实施例中,所述饮食单元还包括:
推进模组,所述推进模组设置于所述储食容器的内部,并与所述控制单元通信连接,用于将所述储食容器的食物推送至所述第三容纳空间。
在其中的一些实施例中,所述饮食单元还包括:
坡道,所述坡道的第一端与所述箱体的内部的底面连接,所述坡道的第二端与所述的三容纳空间连接;
其中,所述坡道为网格状结构。
在其中的一些实施例中,所述食物回收单元还包括:
至少一第四压力传感器,所述第四压力传感器设置于所述食物回收单元的底部,并与所述控制单元通信连接。
在其中的一些实施例中,所述饮水单元还包括:
第五压力传感器,所述第五压力传感器设置于所述储水容器的底部。
在其中的一些实施例中,还包括:
通风系统,所述通风系统设置于所述箱体,所述通风系统包括:
至少一进风管,所述进风管的第一端贯穿所述箱体的侧壁设置,所述进风管的第二端设置于所述箱体的外部;
至少一排风管,所述排风管的第一端贯穿所述箱体的侧壁设置,所述排风管的第二端设置于所述箱体的外部,且所述进风管与所述排风管相对设置和/或错位设置。
在其中的一些实施例中,所述通风系统还包括:
至少一风扇,所述风扇设置于所述进风管的第二端和/或所述排风管的第二端,并与所述控制单元连接。
在其中的一些实施例中,所述通风系统还包括:
至少一气体传感器,所述气体传感器设置于所述箱体的内部,并与所述控制单元通信连接。
在其中的一些实施例中,所述垃圾回收系统还包括:
垃圾容器,所述垃圾容器设置于所述第三容纳空间以及所述坡道的正下方,且所述第四压力传感器设置于所述垃圾容器的底部;
其中,所述垃圾容器与所述箱体为可拆卸连接。
在其中的一些实施例中,所述垃圾容器为推拉式设置。
本发明采用以上技术方案,与现有技术相比,具有如下技术效果:
本发明的一种实验鼠监测系统,通过对饮食单元和食物回收单元的双重设置,可以精确测量箱体内部每只实验鼠每次饮食重量,减少测量误差;通过对饮水单元的称重改进,无须人工反复测量,即可精确获取箱体内部每只实验鼠每次饮水量,便于统计每小时和/或每天饮水量;通过轨迹监测单元监测实验鼠运动轨迹,结构简单,精确获取箱体内部每只实验鼠运动量。
附图说明
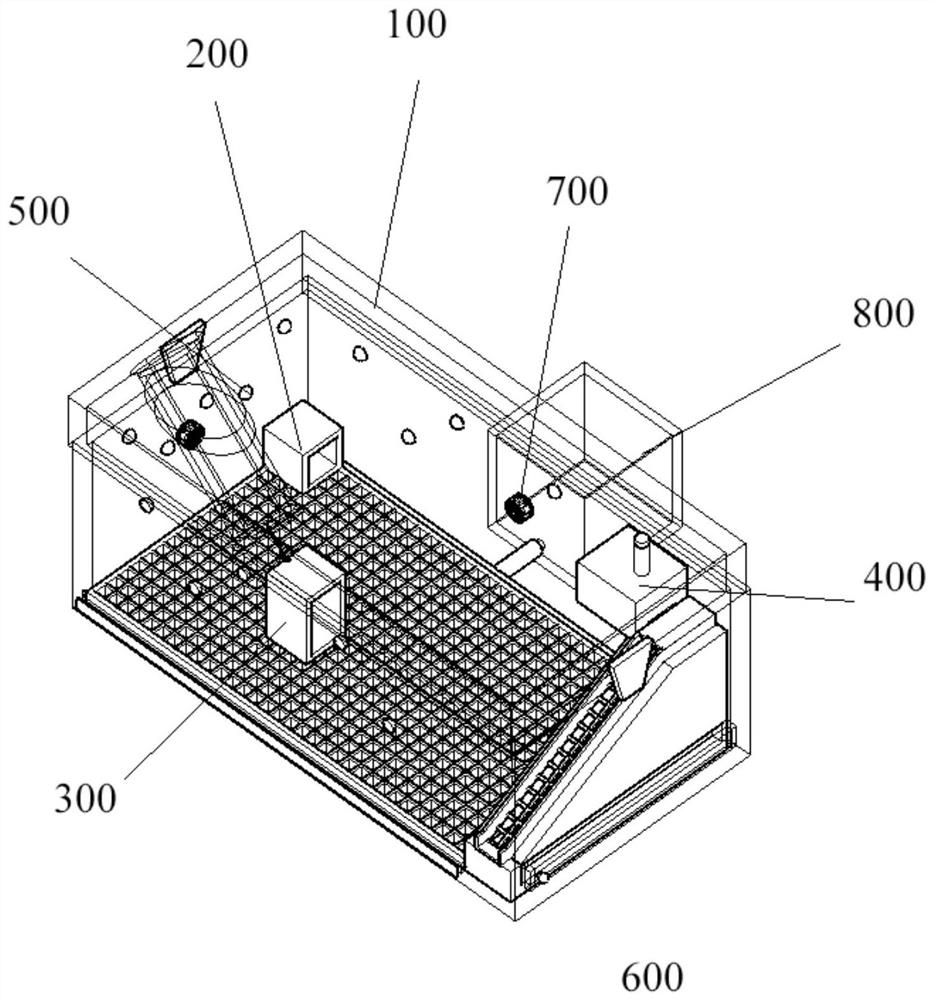
图1是本发明的一个示意性实施例的示意图;
图2是本发明的一个示意性实施例的电气元件的连接框图;
图3是本发明的一个示意性实施例的箱体的示意图;
图4是本发明的一个示意性实施例的饮水单元的示意图;
图5是本发明的一个示意性实施例的饮食单元的示意图;
图6是本发明的一个示意性实施例的饮食单元的部分剖面图;
图7是本发明的一个示意性实施例的食物回收单元的示意图;
图8是本发明的一个示意性实施例的垫料单元的示意图;
图9是本发明的一个示意性实施例的使用状态示意图。
其中的附图标记为:100、箱体;101、封闭元件;102、开槽;103、网格板;104、升降模组;105、盖板;
200、体重监测单元;201、第一压力传感器;202、第一通信传感器;
300、饮水单元;301、储水容器;302、饮水管;303、第二压力传感器;304、第二通信传感器;305、球形体;306、第五压力传感器;307、流量传感器;
400、饮食单元;401、储食容器;402、挡板;403、第三压力传感器;404、第三通信传感器;405、温度控制模组;406、推进模组;407、坡道;
500、轨迹监测单元;501、第四通信传感器;502、图像传感器;
600、食物回收单元;601、第四压力传感器;602、第一回收腔;
700、通风单元;701、进风管;702、排风管;703、风扇;704、气体传感器;
800、垫料单元;801、储料容器;802、清理元件;803、喷嘴;804、开关元件;
900、控制单元。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
本发明的一种实验鼠监测系统,如图1~2所示,包括箱体100、体重监测单元200、饮水单元300、饮食单元400、轨迹监测单元500、食物回收单元600、通风单元700、垫料单元800以及控制单元900。其中,体重监测单元200设置于箱体100的内部,饮水单元300设置于箱体100,饮食单元400设置于箱体100,轨迹监测单元500设置于箱体100的内部,食物回收单元600设置于箱体100的内部,通风单元700设置于箱体100,垫料单元800设置于箱体100,控制单元900设置于箱体100的内部和/或外部、并分别与体重监测单元200、饮水单元300、饮食单元400、轨迹监测单元500、通风单元700、垫料单元800通信连接。
如图3所示,箱体100为可开闭的封闭式饲养箱或培养箱,其可以全部由透明材料制成、可以全部由非透明材料制成、可以由透明材料和非透明材料混合制成(即箱体100的一部分由非透明材料制成,一部分由透明材料制成以便于观察)。
箱体100包括封闭元件101,封闭元件101设置于箱体100的侧部或顶部,以便于试验人员向箱体100内放入实验鼠或从箱体100内取拿实验鼠。
在其中的一些实施例中,封闭元件101与箱体100进行转动连接,包括但不限于合页连接。
在其中的一些实施例中,封闭元件101与箱体100进行卡合连接,通过若干卡合元件进行锁紧。
箱体100还开设有供食物回收单元600使用的开槽102,开槽102设置于箱体100的侧部。
箱体100还包括网格板103,网格板103紧贴设置于箱体100的内部的底部。
箱体100还包括升降模组104,升降模组104与网格板103连接,并与控制单元900通信连接,用于对网格板103进行抬升或降低。具体地,升降模组104设置于箱体100的内部的底部,网格板103与升降模组104的顶部连接,在无须对箱体100内的垫料进行清理的情况下,网格板103紧贴箱体100的内部的底侧设置;在对箱体100内的垫料进行清理的情况下,控制单元900控制升降模组104动作,使网格板103上升,以使实验鼠与垫料进行分离,进而可以在不影响实验鼠的情况下,对垫料进行清理以及更换。
在其中的一些实施例中,升降模组104为丝杆传动模组,包括电机以及若干伸缩丝杆,电机驱动若干伸缩丝杆动作,以使伸缩丝杆变长或变短,从而带动网格板103上升或下降。
在其中的一些实施例中,升降模组104为滑动传动模组,包括电机(设置在箱体100的侧壁中)以及若干滑动杆,若干滑动杆对称地设置在网格板103的侧壁。相对应地,箱体100的侧壁设置有若干滑动轨道以及限位元件,用于使滑动杆沿着滑动轨道滑动,并使滑动杆停留在特定位置。
箱体100还包括盖板105,盖板105可拆卸地与开槽102进行连接,包括但不限于卡接、嵌入连接等。
在其中的一些实施例中,箱体100还包括防脱网板(图中未示出),防脱网板可拆卸地设置在箱体100的内部的上侧,用于防止实验鼠逃脱。
如图1~2所示,体重监测单元200设置于箱体100的内部,并位于网格板103的上侧。体重监测单元200包括至少一第一容纳空间(图中未示出)、至少一第一压力传感器201、至少一第一通信传感器202,其中,在每一第一容纳空间的底部设置一第一压力传感器201以及在每一第一容纳空间的内部设置一第一通信传感器202。
第一容纳空间设置至少一第一开口,以用于实验鼠经过该第一开口进入第一容纳空间的内部,或离开第一容纳空间。
此外,第一容纳空间的体积仅能容纳一只实验鼠。
在其中的一些实施例中,第一容纳空间设置至多两第一开口,其中,一第一开口用于供实验鼠进入第一容纳空间,另一第一开口用于供实验鼠离开第一容纳空间。
第一压力传感器201设置于第一容纳空间的底部,并与控制单元900通信连接,用于对进入第一容纳空间的实验鼠的体重进行检测,以将实验鼠的体重数据传输至控制单元900。
第一通信传感器202设置第一容纳空间的内部,并与控制单元900通信连接,用于对进入第一容纳空间的实验鼠进行识别,从而识别实验鼠的编号,并将实验鼠的编号传输至控制单元900,控制单元900将实验鼠的编号、实验鼠的体重数据进行一一对应存储并向外传输。
在其中的一些实施例中,实验鼠携带的通信芯片为射频芯片,包括但不限于射频识别芯片(Radio Frequency Identification芯片,RFID芯片)。相对应地,第一通信传感器202为射频传感器。
在其中的一些实施例中,实验鼠携带荧光标记,不同实验鼠的荧光标记不同。相对应地,第一通信传感器202为图像传感器。
在其中的一些实施例中,体重监测单元200包括多个第一容纳空间、多个第一压力传感器201、多个第一通信传感器202,以供同时测量多个实验鼠的体重数据。
如图4所示,饮水单元300包括至少一储水容器301、至少一饮水管302、至少一第二容纳空间(图中未示出)、至少一第二压力传感器303以及至少一第二通信传感器304。其中,储水容器301设置于箱体100的内部或外部;饮水管302的第一端与储水容器301连接,饮水管302的第二端位于箱体100的内部;第二容纳空间设置于箱体100的内部,并与饮水管302的第二端连接;第二压力传感器303设置于第二容纳空间的底部;第二通信传感器304设置于第二容纳空间的内部。
在其中的一些实施例中,储水容器301设置于箱体100的外部,并可拆卸地与箱体100连接,包括但不限于插接。
饮水管302倾斜设置,即饮水管302第二端所处的水平面低于饮水管302第一端所处的水平面,以便水沿着饮水管302向下流动。
在其中的一些实施例中,饮水单元300还包括球形体305,球形体305嵌入设置在饮水管302的第二端,且球形体305完全位于饮水管302的内部。球形体305的半径大于饮水管302的第二端的半径,从而球形体305无法从饮水管302的第二端掉落。
具体地,在使用过程中,在施加外力于球形体305的情况下(即实验鼠舔舐球形体305施加外力),球形体305沿饮水管302由饮水管302的第二端向饮水管302的第一端滚动一段距离,以使饮水管302的饮用水由饮水管302的第二端流出;在施加于球形体305的外力被撤销的情况下,球形体305沿饮水管302向饮水管302的第二端滚动,并堵住饮水管302的第二端,以使饮水管302的饮用水无法由饮水管302的第二端流出。
第二容纳空间设置至少一第二开口,以用于实验鼠经过该第二开口进入第二容纳空间的内部,或离开第二容纳空间。
此外,第二容纳空间的体积仅能容纳一只实验鼠。
在其中的一些实施例中,第二容纳空间设置至多两第二开口,其中,一第二开口用于供实验鼠进入第二容纳空间,另一第二开口用于供实验鼠离开第二容纳空间。
第二压力传感器303设置于第二容纳空间的底部,并与控制单元900通信连接,用于对进入第二容纳空间的实验鼠的体重进行检测,以将实验鼠的体重数据传输至控制单元900。其中,体重数据包括实验鼠进入第二容纳空间的体重数据、以及实验鼠离开第二容纳空间的体重数据。通过两次体重数据即可获取实验鼠每次的饮水量。
第二通信传感器304设置第二容纳空间的内部,并与控制单元900通信连接,用于对进入第二容纳空间的实验鼠进行识别,从而识别实验鼠的编号,并将实验鼠的编号传输至控制单元900,控制单元900将实验鼠的编号、实验鼠的体重数据进行一一对应存储并向外传输。
在其中的一些实施例中,实验鼠携带的通信芯片为射频芯片,包括但不限于射频识别芯片(Radio Frequency Identification芯片,RFID芯片)。相对应地,第二通信传感器304为射频传感器。
在其中的一些实施例中,实验鼠携带荧光标记,不同实验鼠的荧光标记不同。相对应地,第二通信传感器304为图像传感器。
在其中的一些实施例中,饮水单元300还包括第五压力传感器306,第五压力传感器306设置于储水容器301的底部,并与控制单元900通信连接,用于对储水容器301的重量进行监测。
在其中的一些实施例中,饮水单元300还包括流量传感器307,流量传感器307设置于球形体305或饮水管302的第二端,并与控制单元900通信连接,用于对实验鼠饮水的体积进行计算。
在其中的一些实施例中,球形体305为带有通信功能的计量齿轮,实验鼠推动球形体305时,球形体305转动的次数即可换算成饮水的体积(或流量)。
在其中的一些实施例中,饮水单元300包括一储水容器301、多个饮水管302(每一饮水管302均单独与储水容器301连接)、多个第二容纳空间(每个第二容纳空间均单独连接一饮水管302)、多个第二压力传感器303(每个第二容纳空间的底部设置一第二压力传感器303)、多个第二通信传感器304(每个第二容纳空间的内部设置一第二通信传感器304)、多个球形体305(每个饮水管302的第二端设置一球形体305)以及一第五压力传感器306,从而满足多个实验鼠同时饮水的需求。
如图5~6所示,饮食单元400包括储食容器401、至少一第三容纳空间(图中未示出)、至少一挡板402、至少一第三压力传感器403、至少一第三通信传感器404、至少一温度控制模组405、至少一推进模组406以及至少一坡道407。其中,储食容器401设置于箱体100的内部或箱体100的外部;第三容纳空间设置在箱体100的内部,并与储食容器401连接;挡板402转动地设置于第三容纳空间的底部;第三压力传感器403设置于挡板402的底部;第三通信传感器404设置于第三容纳空间的内部;温度控制模组405设置于储食容器401的内部;推进模组406设置于储食容器401的内部;坡道407设置于箱体100的内部,坡道407的第一端与储食容器401连接,坡道407的第二端与网格板103连接。
在其中的一些实施例中,储食容器401设置于箱体100的外部,并可拆卸地与箱体100连接,包括但不限于插接。
在其中的一些实施例中,储食容器401设置于箱体100的内部,其设置有输送管,输送管的第一端与储食容器401连接,输送管的第二端贯穿箱体100的侧壁(顶部或侧部);在输送管的第二端还设置有封盖元件,用于对输送管的第二端进行封闭。
第三容纳空间通过导引管与储食容器401连接,且导引管倾斜设置,以使储食容器401的食物通过导引管向下滑动至第三容纳空间。
第三容纳空间设置至少一第三开口,以用于实验鼠经过该第三开口进入第三容纳空间的内部,或离开第三容纳空间。
此外,第三容纳空间的体积仅能容纳一只实验鼠。
挡板402转动地设置在第三容纳空间的底部,转轴为电控转轴,并与控制单元900通信连接,用于在控制单元900下达指令的情况下,进行翻转,以使位于挡板402上的食物掉入食物回收单元600。采用这种挡板的目的是,将不新鲜的食物抛弃,避免实验鼠误食,防止实验数据有误差。
第三压力传感器403设置于挡板402的底部,并与控制单元900通信连接,用于对位于挡板402上的食物重量进行检测,并将食物重量数据传输至控制单元900。
第三通信传感器404设置于第三容纳空间的内部,并与控制单元900通信连接,用于对进入第三容纳空间的实验鼠进行识别,从而识别实验鼠的编号,并将实验鼠的编号传输至控制单元900,控制单元900将实验鼠的编号、实验鼠的体重数据进行一一对应存储并向外传输。
在其中的一些实施例中,实验鼠携带的通信芯片为射频芯片,包括但不限于射频识别芯片(Radio Frequency Identification芯片,RFID芯片)。相对应地,第三通信传感器404为射频传感器。
在其中的一些实施例中,实验鼠携带荧光标记,不同实验鼠的荧光标记不同。相对应地,第三通信传感器404为图像传感器。
温度控制模组405设置于储食容器401的内部,并与控制单元900通信连接,用于对储食容器401的温度进行控制,以使储食容器401内的食物长期(至少15天)处于最佳储存环境,避免食物变质。
在其中的一些实施例中,温度控制模组405为半导体温度控制模组,能够进行制冷和制热,从而满足不同食物的保存要求。
在其中的一些实施例中,温度控制模组405设置于储食容器401的底部和/或侧部,从而使储食容器401内的温度分布均匀。
推进模组406设置于储食容器401的内部,其至少包括推进电机、推进挡板和推进轴,推进挡板通过推进轴与推进电机连接,在推进电机的作用下,推进轴进行往复运动,使推进挡板进行直线方向上的往复运动,以将储食容器内401内的食物推送至输送管,并从输送管掉入第三容纳空间中。
在其中的一些实施例中,推进模组406还包括封闭挡板,封闭挡板设置在输送管的第一端,在封闭挡板通过传动元件与推进电机连接,在推进电机驱动推进挡板向前运动时,封闭挡板敞开,以使食物进入输送管;在推进电机驱动推进挡板向后运动时,封闭挡板关闭,以避免食物进入输送管。
坡道407设置于箱体100的内部,其倾斜一定角度设置,用于供实验鼠沿坡道407向上爬动以进入第三容纳空间。
其中,坡道407为网格状结构,以使实验鼠咀嚼食物产生的残渣通过坡道407掉入食物回收单元600,避免食物残渣停留在坡道407上,影响实验鼠体重数据的监测。
此外,坡道407的两侧还设置有防护墙,避免实验鼠从坡道407掉落。
在其中的一些实施例中,饮食单元400包括若干储食容器401、若干第三容纳空间(每一储食容器401对应一第三容纳空间)、若干挡板402(每一第三容纳空间的底部设置一挡板402)、若干第三压力传感器403(每一挡板402的底部设置一第三压力传感器403)、若干第三通信传感器404(每一第三容纳空间的内部设置一第三通信传感器404)、若干温度控制模组405(每一储食容器401的内部设置一温度控制模组405)、若干推进模组406(每储食容器401的内部设置一推进模组406)以及若干坡道407(每一第三容纳空间设置一坡道407),从而满足多个实验鼠同时进食的要求。
轨迹监测单元500包括若干第四通信传感器501以及若干图像传感器502。其中,若干第四通信传感器501分布设置于箱体100的内部,若干图像传感器502设置于箱体100的内部。
若干第四通信传感器501分别与控制单元900通信连接,用于对箱体100内的实验鼠进行识别,从而识别实验鼠的编号,并将实验鼠的编号传输至控制单元900。
在其中的一些实施例中,实验鼠携带的通信芯片为射频芯片,包括但不限于射频识别芯片(Radio Frequency Identification芯片,RFID芯片)。相对应地,第四通信传感器501为射频传感器。
若干图像传感器502分别与控制单元900通信连接,用于对箱体100内的实验鼠的轨迹进行记录,并将实验鼠的轨迹图像传输至控制单元900。
一般地,在每一第四通信传感器501的旁侧设置一图像传感器502,在实验鼠经过第四通信传感器501的情况下,图像传感器502获取实验鼠的图像数据(包括静态图像数据和动态图像数据)。
如图7所示,食物回收单元600包括第四压力传感器601以及第一回收腔602。其中,第一回收腔602设置于饮食单元400的下方,第四压力传感器601设置于第一回收腔602的底部。
第一回收腔602可拆卸地设置于饮食单元400的下方,用于承接挡板402掉落的食物以及坡道407掉落的食物。
第四压力传感器601与控制单元900通信连接,用于监测第一回收腔602的重量数据,并传输重量数据至控制单元900。
其中,第一回收腔602对应于一开槽102。
通风单元700包括至少一进风管701、至少一排风管702、至少一风扇703以及至少一气体传感器704。其中,进风管701设置于箱体100的一侧,排风管702与进风管701相对应设置,风扇703设置于进风管701一侧,气体传感器704设置于箱体100的内部。
进风管701贯穿箱体100的侧壁设置,且进风管701的两端均设置有过滤网。
排风管702贯穿箱体100的侧壁设置,且排风管702的两端均设置有过滤网。
在其中的一些实施例中,排风管702与进风管701对称设置,即进风管701设置于箱体100的左侧壁,则排风管702设置于箱体100的右侧壁;排风管702与进风管701非对称设置,即进风管701设置于箱体100的左侧壁,则排风管702设置于箱体100的前侧壁/后侧壁/上侧壁。
风扇703设置于箱体100的外侧,对准进风管701设置,并与控制单元900通信连接,用于在特定情况下,提高向箱体100的气体流动速度。
气体传感器704设置于箱体100的内部,并与控制单元900通信连接,用于监测箱体100内的气体数据,包括但不限于二氧化碳浓度,并将气体数据传输至控制单元900。
如图8所示,垫料单元800包括储料容器801、清理元件802、喷嘴803以及开关元件804。其中,储料容器801设置于箱体100的外部,清理元件802设置于箱体100的内部,喷嘴803设置于清理元件802并与储料容器801连接,开关元件804设置于箱体100的内部的底侧。
清理元件802设置于箱体100的内部,位于网格板103与箱体100的内部的底部之间,并与控制单元900通信连接,其用于在网格板103升起的情况下,将箱体100的垫料推送至箱体100的一侧;并在推送完成的情况下,返回至初始位置。
在其中的一些实施例中,清理元件802为T形清理推板,包括横板和竖杆,其中竖杆为伸缩结构。
进一步地,清理元件802的横板嵌入设置在箱体100的侧壁内,竖杆位于箱体100的外侧。
喷嘴803设置于清理元件802的前侧,即设置于清理元件802的横板,并与控制单元900通信连接,用于在清理垫料完成后,吸取储料容器801的垫料,并喷洒到箱体100的内部。
具体地,喷嘴803为若干个,均布于清理元件802的横板,且清理元件802为中空结构。
开关元件804设置于箱体100的底部,并与控制单元900通信连接。相对应地,箱体100的底部设置有垫料排出口(图中未示出),开关元件804封闭垫料排出口设置。
在其中的一些实施例中,开关元件804为磁力开关。
控制单元900设置于箱体100的内部或外部,其为安装有若干电气元件的电路板,用于接收体重监测单元200、饮水单元300、饮食单元400、轨迹监测单元500、通风单元700传输的相关数据,并控制饮食单元400以及通风单元700。
本发明的具体实施方式如下:
食物保存:控制单元900向饮食单元400的温度控制模组405发送温度控制信号,以调节储食容器401的温度,确保储食容器401内的食物可以长期保存(至少为15天);
饮食监测:实验鼠采食时,其身份标签会被第三通信传感器404读取,且第三容纳空间仅能容纳一只实验鼠进行采食,通过对挡板402上的食物重量的监测,以及第一回收腔602的重量监测,可以获取挡板402上食物重量的减少量、第一回收腔602内食物重量的增加量,两个数据之差为实验鼠的饮食量;
易腐食物更新:在挡板402上的食物消失或减少至一定重量的情况下,控制单元900向推进模组406发送控制信号,以控制推进模组406工作,进而使储食容器401内的食物进入第三容纳腔室的挡板402上;
过期食物收集以及称重:在挡板402上的食物暴露于空气一定时间后,控制单元900控制挡板402进行转动,以使挡板402上的食物掉入第一回收腔602,并使挡板402复位;
食物残渣收集以及称重:实验鼠有啃食食物的习惯,啃食过程中形成的碎渣一般不会被实验鼠食用,坡道407以一定的倾斜角与挡板402上的食物相联,浪费的食物碎渣会掉入第一回收腔602并称量,不计入实验鼠实际用食量;
饮水监测:在实验鼠进入第二容纳空间的情况下,第二压力传感器303对实验鼠的体重数据进行第一次监测,在实验鼠离开第二容纳空间的情况下,第二压力传感器303对实验鼠的体重数据进行第二次监测;两个数据之差即为实验鼠的饮水量;或者,利用流量传感器307对实验鼠每次的饮水量进行监测,利用饮水前后流量传感器307传输的流量数据进行计算(即利用流量与时间之间的关系计算饮水量体积);
加水监测:第五压力传感器306对储水容器301的重量进行监测,在储水容器301的重量达到一定阈值时,控制单元900会向外界传输信号,以提醒试验人员对储水容器301进行加水操作;
体重监测:实验鼠进入第一容纳空间时,其身份标签会被第一通信传感器202读取,其体重数据会被第一压力传感器201监测,且第一容纳空间仅能容纳一只实验鼠进行体重监测;
运动监测:通过轨迹监测单元500对每只实验鼠的轨迹监测,利用第四通信传感器501读取每只实验鼠的身份标签,图像传感器502获取箱体100内实验鼠的图像数据,且每只实验鼠还设置有荧光标记,利用双重身份认证,即可获取每只实验鼠每日/每周/每月的运动量;
垫料清理:通过升降模组104对网格板103进行定期抬升,使位于网格板103上的实验鼠被抬起,以与垫料进行分离;如图9所示,控制单元900控制清理元件802进行运动,使箱体100的垫料被推送到垫料排出口,此时,开关元件804动作使垫料排出口露出,废弃垫料从垫料排出口排出;在垫料排出完成后,清理元件802复位,开关元件804封闭垫料排出口;控制单元900控制喷嘴803动作,将储料容器801内的垫料被均匀喷射到箱体100的底部。
以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
- 一种实验鼠监测系统
- 一种实验鼠饲养单元、实验鼠饲养装置及实验鼠工作站