一种电荷泵电路
文献发布时间:2023-06-19 11:05:16
技术领域
本发明涉及电荷泵电路技术领域,具体涉及一种电荷泵电路。
背景技术
随着新能源汽车、智能机器人以及智能家居的快速发展,出现了智能功率集成电路(SPIC)的设计,智能功率集成电路是集功率器件、控制电路、驱动电路、保护电路、传感器等模块为一体的新型集成电路。在某些SPIC中,采用N型功率管作为高侧驱动管,为了使高侧驱动管导通,需要产生一个比电源高的电平,电荷泵电路常用于产生这样一个高于电源电压的电压信号。然而传统电荷泵电路具有驱动能力差,充电时间慢等缺点。
发明内容
鉴于背景技术的不足,本发明是提供了一种充电快和驱动能力强的电荷泵电路,能够100%占空比全周期的驱动负载。
为解决以上技术问题,本发明提供了如下技术方案:一种电荷泵电路,包括死区控制模块、电荷泵模块和反馈模块,死区控制模块根据输入的第一时钟信号向电荷泵模块输入多路具有死区时间的第二时钟信号,电荷泵模块根据输入的第二时钟信号输出驱动电压,驱动电压输入到反馈模块,反馈模块根据驱动电压向死区控制模块输入反馈信号,反馈信号控制死区控制模块是否向电荷泵模块输入第二时钟信号。
可选地,在某种实施方式中,死区控制模块包括与门和逻辑处理单元,与门的两输入端分别输入第一时钟信号和反馈信号,与门的输出端依次串联有M级延时电路,第一级延迟电路至第N级延时电路的延时时间和第N+1级延时电路至第M级的延时电路的延时时间相同,逻辑处理单元根据第一时钟信号、第N级延时电路的输出信号和第M级延时电路的输出信号输出四路具有死区时间的第二时钟信号。
可选地,在某种实施方式中,延时电路包括RC延时单元和整形单元,整形单元对RC延时单元的输出信号进行整形,整形单元包括至少一个反相器,当整形单元包括两个以上的反相器时,所有反相器依次串联,整形单元的输出信号为该延时电路的输出信号。
可选地,在某种实施方式中,电荷泵模块包括场效应管M1、M2、M3和M4、电容C1和C2,场效应管M1、M2、M3和M4的栅极分别输入一路第二时钟信号,场效应管M4的源极、场效应管M2的漏极和电容C2一端分别与电源VM电连接,场效应管M4的漏极和场效应管M3的漏极分别和电容C1一端电连接,场效应管M2的源极和场效应管M1的漏极分别和电容C1另一端电连接,场效应管M1的源极接地,场效应管M3的源极与电容C2另一端电连接。
可选地,在某种实施方式中,场效应管M1、M2和M4为N型开关功率管,场效应管M3为P型开关功率管。
可选地,在某种实施方式中,场效应管M4的栅极与齐纳二极管Z1的负极电连接,场效应管M4的源极与齐纳二极管Z1的正极电连接,场效应管M2的栅极与齐纳二极管Z2的负极电连接,场效应管M2的源极与齐纳二极管Z2的正极电连接。
可选地,在某种实施方式中,本发明还包括电平转换模块,电平转换模块将四路第二时钟信号的电平进行转换,并输出第三时钟信号,第三时钟信号输入到电荷泵模块。
可选地,在某种实施方式中,电平转换模块包括第一转换单元、第二转换单元、第三转换单元和第四转换单元;
第一转换单元包括场效应管M5、M6和电阻R1,场效应管M5的栅极和场效应管M6的栅极分别输入第二时钟信号CP1,场效应管M5的源极与电源VDD电连接,场效应管M5的漏极通过电阻R1与场效应管M6的漏极电连接,场效应管M6的源极接地,场效应管M6的漏极输出第三时钟信号CLK1;
第二转换单元包括第一电流镜电路和第二电流镜电路,第一电流镜电路对输入的基准电流进行比例调节,输出第一调节电流,第二电流镜电路对第一调节电流进行比例调节,输出第二调节电流,第二调节电流分别输入到电阻R2和场效应管M10的漏极,电阻R2输出第三时钟信号CLK2,第二时钟信号CP2输入到场效应管M10的栅极,场效应管M10的源极接地,第一电流镜电路与第二电流镜电路之间设有场效应管M9,第二时钟信号CP2经过反相器i1输入到场效应管M9的栅极;
第三转换单元包括场效应管M13、M14、M15、M16、M17、M18、M19和M20、反相器i3和反相器i4,场效应管M13的漏极、M44的漏极、反相器i3的电源端和反相器i4的电源端分别与电源VM电连接,场效应管M13的源极分别和场效应管M14的栅极、M15的栅极、M16的栅极、M16的漏极和M17的漏极电连接,场效应管M13的栅极分别和场效应管M15的漏极、场效应管M14的源极、场效应管M18的漏极和反相器i3的输入端电连接,反相器i3的输出端与反相器i4的输入端电连接,反相器i4的输出端输出第三时钟信号CLK3,场效应管M15的源极分别和场效应管M16的源极、反相器i3的接地端和电阻R3一端电连接,电阻R3另一端与反相器i4的接地端电连接,场效应管M17和M18的栅极分别输入电压Vbias,场效应管M17的源极与场效应管M19的漏极电连接,场效应管M18的源极与场效应管M20的漏极电连接,场效应管M19和M20的源极接地,第二时钟信号CP3输入到场效应管M19的栅极,第二时钟信号CP3输入到场效应管M20的栅极;
第四转换单元包括电阻R4、R5、场效应管M25、M26和第三电流镜电路,电阻R4一端与电源VM电连接,所述电阻R4另一端与场效应管M25的漏极电连接,场效应管M25的栅极输入第三时钟信号CLK3,场效应管M25的源极通过电阻R5与场效应管M26的漏极电连接,场效应管M26的栅极输入第二时钟信号CP4,场效应管M26的源极与第三电流镜电路电连接,第三电流镜电路对基准电流进行比例调节,比例调节后的基准电流大小与从场效应管M26流过的电流大小相同,场效应管M26的漏极输出第三时钟信号CLK4。
可选地,在某种实施方式中,本发明还包括浮动电压模块,浮动电压模块根据驱动电压输出第一电压、第二电压和基准电流,驱动电压与第一电压的差值恒定,第一电压输入到场效应管M15的源极,第二电压输入到场效应管M17的栅极。
可选地,在某种实施方式中,反馈模块在驱动电压比电源VM小于第一阈值时向死区控制模块输入高电平的反馈信号,在驱动电压比电源VM大于第二阈值时向死区控制模块输入低电平的反馈信号。
本发明与现有技术相比所具有的有益效果是:首先通过反馈模块检测电荷泵模块输出的驱动电压,能够在驱动电压过高或者过低时进行调节,确保输出的驱动电压的幅值能够始终满足驱动电路的要求,因此本发明能够100%占空比全周期的向负载提供驱动电压,能够在驱动电压的幅值过低时进行调节保护;其次本发明通过电容C1的正向充电和逆向泵电来输出驱动电压,而电容C1的正向充电和逆向泵电由场效应管M1、M2、M3和M4的通断控制,因此只需控制CLK1、CLK2、CLK3和CLK4的波形频率便能控制电容C1的正向充电和逆向泵电的速度。
附图说明
本发明有如下附图:
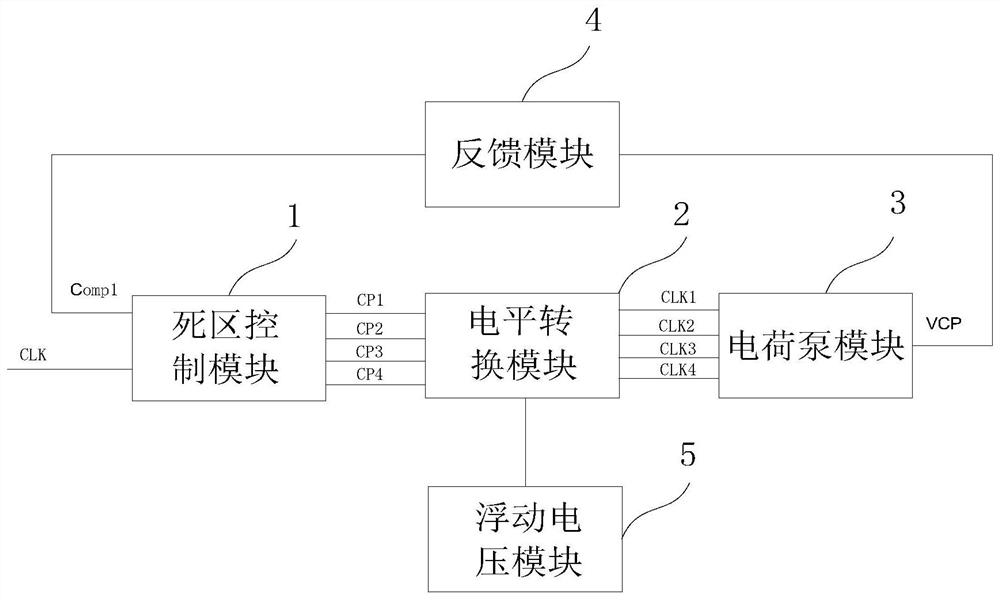
图1为本发明的结构框图;
图2为本发明的死区控制模块的电路图;
图3为本发明的第一转换单元和第二转换单元的电路图;
图4为本发明的第三转换单元和第四转换单元的电路图;
图5为本发明的四路第三时钟信号与驱动电压VCP的波形图;
图6为本发明的电荷泵模块的电路图;
图7为本发明的浮动电压模块的电路图;
图8为本发明的反馈模块的电路图;
图9为本发明的负载能力的仿真图;
图10为电荷泵模块输出的驱动电压VCP建立的波形图;
图11为本发明的电容C1的正向充电和逆向泵电波形图。
具体实施方式
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
如图1所示,一种电荷泵电路,包括死区控制模块1、电平转换模块2、电荷泵模块3、反馈模块4和浮动电压模块5,死区控制模块根据输入的第一时钟信号CLK向电平转换模块2输入四路具有死区时间的第二时钟信号,分别为第二时钟信号CP1、第二时钟信号CP2、第二时钟信号CP3和第二时钟信号CP4,电平转换模块2将四路第二时钟信号的电平进行转换,并输出四路第三时钟信号,分别为第三时钟信号CLK1、第三时钟信号CLK2、第三时钟信号CK3和第四时钟信号CLK4,四路第三时钟信号输入到电荷泵模块3,电荷泵模块3根据输入的第三时钟信号输出驱动电压VCP,驱动电压VCP输入到反馈模块4,反馈模块4根据驱动电压VCP向死区控制模块1输入反馈信号Comp1,反馈信号Comp1控制死区控制模块是否向电荷泵模块输入第二时钟信号,浮动电压模块5根据驱动电压VCP输出第一电压HVGND和第二电压HVGND_OK,第一电压HVGND和第二电压HVGND_OK输入到电平转换模块2,驱动电压与第一电压HVGND的差值恒定。
如图2所示,本实施例中,死区控制模块1包括与门和逻辑处理单元14,与门的两输入端分别输入第一时钟信号CLK和反馈信号Comp1,与门的输出端依次串联有四级延时电路,第一级延迟电路10至第二级延时电路11的延时时间和第三级延时电路12至第四级的延时电路13的延时时间相同,逻辑处理单元14根据第一时钟信号CLK、第二级延时电路11的输出信号和第四级延时电路13的输出信号输出四路具有死区时间的第二时钟信号。另外,延时电路包括RC延时单元和整形单元,整形单元对RC延时单元的输出信号进行整形,整形单元包括至少一个反相器,当整形单元包括两个以上的反相器时,所有反相器依次串联,整形单元的输出信号为该延时电路的输出信号。本实施例中,第一延时电路10包括一个反相器,第二延时电路11包括三个反相器,第三延时电路12和第四延时电路分别包括一个反相器。
当反馈信号Comp1为高电平型号时,死区控制模块1正常输出四路第二时钟信号,当反馈信号Comp1为低电平信号时,死区控制模块1不再输出四路第二时钟信号。
如图3和4所示,电平转换模块2包括第一转换单元20、第二转换单元21、第三转换单元22和第四转换单元23;
参照图3,第一转换单元20包括场效应管M5、M6和电阻R1,场效应管M5的栅极和场效应管M6的栅极分别输入第二时钟信号CP1,场效应管M5的源极与电源VDD电连接,场效应管M5的漏极通过电阻R1与场效应管M6的漏极电连接,场效应管M6的源极接地,场效应管M6的漏极输出第三时钟信号CLK1,其中,场效应管M5和M6组成反相器。
第二转换单元21包括由场效应管M7和M8组成的第一电流镜电路和场效应管M11和M12组成的第二电流镜电路,场效应管M7和M8的宽长比之比为N:1,场效应管M11和M12的宽长比之比为N:1,第一电流镜电路对输入的基准电流Ibias进行比例调节,将其放大N倍,输出第一调节电流,第二电流镜电路对第一调节电流进行比例调节,将其放大N倍,输出第二调节电流,第二调节电流分别输入到电阻R2和场效应管M10的漏极,电阻R2输出第三时钟信号CLK2,第二时钟信号CP2输入到场效应管M10的栅极,场效应管M10的源极接地,第一电流镜电路与第二电流镜电路之间设有场效应管M9,第二时钟信号CP2经过反相器i1输入到场效应管M9的栅极;通过第一电流镜电路和第二电流镜电路可以将第三时钟信号CLK2的电平设置到合适的电位上,当场效应管M10处于截止状态时,第三时钟信号CLK2电压为:VCLK2=VCPL+VBV;当M10处于导通状态时,第三时钟信号CLK2电压为:VCLK2=VDS10,其中VCPL为电容C1的下极板电压,VBV为齐纳二极管Z1的稳压电压,VDS10为场效应管M10的源漏电压。
参照图4,第三转换单元22包括由场效应管M13、M14、M15、M16、M17、M18、M19和M20组成的高低压转换电路、由场效应管M21和M22组成的反相器i3和由场效应管M23和M24组成的反相器i4,反相器i3和反相器i4用于对第三时钟信号CLK3进行整形和提高驱动能力,场效应管M13的漏极、M44的漏极、反相器i3的电源端和反相器i4的电源端分别与电源VM电连接,场效应管M13的源极分别和场效应管M14的栅极、M15的栅极、M16的栅极、M16的漏极和M17的漏极电连接,场效应管M13的栅极分别和场效应管M15的漏极、场效应管M14的源极、场效应管M18的漏极和反相器i3的输入端电连接,反相器i3的输出端与反相器i4的输入端电连接,反相器i4的输出端输出第三时钟信号CLK3,场效应管M15的源极分别和场效应管M16的源极、反相器i3的接地端和电阻R3一端电连接,电阻R3另一端与反相器i4的接地端电连接,场效应管M17和M18的栅极分别输入电压Vbias,场效应管M17的源极与场效应管M19的漏极电连接,场效应管M18的源极与场效应管M20的漏极电连接,场效应管M19和M20的源极接地,第二时钟信号CP3输入到场效应管M19的栅极,第二时钟信号CP3输入到场效应管M20的栅极;其中场效应管M13、M14、M15、M16、M17、M18、M19和M20组成高低压转换电路;在实际使用时,当场效应管M19处于截止状态,第三时钟电压CLK3电压为VCLK3=VCP;当场效应管M19处于导通状态时,第三时钟信号CLK3电压为VCLK3=VCP-5V=HVGND,场效应管M17和M18受浮动电压模块5产生的第二电压HVGND_OK控制,当浮动电压模块5工作异常时,第二电压HVGND_OK会上升到驱动电压VCP的高电位,从而导致场效应管M17和场效应管M18管的过驱动电压小于阈值电压,从而被偏置到截止状态,此时第三转换单元22输出的第三时钟信号CLK3将一直为逻辑高电平,电荷泵模块3将不再正常工作。
第四转换单元23包括电阻R4、R5、场效应管M25、M26和由场效应管M27和M28组成的第三电流镜电路,场效应管M25和M26的宽长比之比为M:1,电阻R4一端与电源VM电连接,电阻R4另一端与场效应管M25的漏极电连接,场效应管M25的栅极输入第三时钟信号CLK3,场效应管M25的源极通过电阻R5与场效应管M26的漏极电连接,场效应管M26的栅极输入第二时钟信号CP4,场效应管M26的源极与第三电流镜电路电连接,第三电流镜电路对基准电流进行比例调节,比例调节后的基准电流大小与从场效应管M26流过的电流大小相同,场效应管M26的漏极输出第三时钟信号CLK4;在实际使用时,当场效应管M26处于导通状态时,第三时钟信号CLK4电压为:VCLK4=VM-VF;当场效应管M26处于截止状态时,第三时钟信号CLK4电压为:VCLK4=VCP,其中VM为电源电压,VF为齐纳二极管Z1的正向导通电压。
本实施例中,第三时钟信号CLK1、第三时钟信号CLK2、第三时钟信号CK3和第四时钟信号CLK4和电路泵模块输出的驱动电压VCP的波形图参照图5。
参照图6,本实施例中,电荷泵模块3包括场效应管M1、M2、M3和M4、电容C1和C2,场效应管M1、M2、M3和M4的栅极分别输入一路第二时钟信号,场效应管M4的源极、场效应管M2的漏极和电容C2一端分别与电源VM电连接,场效应管M4的漏极和场效应管M3的漏极分别和电容C1一端电连接,场效应管M2的源极和场效应管M1的漏极分别和电容C1另一端电连接,场效应管M1的源极接地,场效应管M3的源极与电容C2另一端电连接。
其中,场效应管M1、M2和M4为N型开关功率管,场效应管M3为P型开关功率管,功率管M3的尺寸为功率管M1,M2,M4的2-3倍。功率管M1、M2和M4的尺寸相同,功率管M3的尺寸为功率管M1的2-3倍。
作为改进,场效应管M4的栅极与齐纳二极管Z1的负极电连接,场效应管M4的源极与齐纳二极管Z1的正极电连接,场效应管M2的栅极与齐纳二极管Z2的负极电连接,场效应管M2的源极与齐纳二极管Z2的正极电连接。在实际使用时,通过齐纳二极管Z1和Z2可以对场效应管M2和M4的栅极信号的电平做钳位处理,防止场效应管M2和M4因压降过大而被损坏。
参照图7,本实施例中,场效应管M29-M34和二极管Z3、Z4组成了浮动电压模块5。在实际使用时,二极管Z3两端压降达到稳压电压即第一电压HVGND_OK=VCP-VBV,其中VBV为二极管的稳压电压,二极管Z3产生的第一电压HVGND_OK电压用来作为场效应管M31的偏置,场效应管M29和M30连接组成电流镜结构,场效应管M29和M30的宽长比之比为K:1,场效应管M32采用自偏置的连接方法,场效应管M33、M34与M44连接组成电流镜结构用以产生偏置电流,从而使第一电压HVGND稳定在VCP-5V的电平上。通过浮动电压模块2可以使第三转换单元20中的场效应管M15和M16的栅源电压始终在其额定范围内,防止场效应管M15和M16因为其栅源电压过高而损坏。
参照图8,反馈模块由场效应管M35-M43、三极管T1、T2、电阻R6-R8组成,其中R6:R7:R8=X:Y:Z,用于设置比较器的跳闸点;场效应管M38、M39和M40栅极连接到V_EN,当正常工作时,V_EN为逻辑高,场效应管M38-M40导通的同时,将场效应管M41-M43的漏极电压限制到了5V-VTH的低压上,场效应管M41-M43与M45连接组成电流镜结构,提供偏置电流,三极管T1和T2用做稳压管,保护场效应管M35、M36和M37;
本实施例中,图3中的Ibias电气节点、图4中的Vbias电气节点和Ibias电气节点、图7中的Ibias电气节点和图8中的Ibias电气节点在实际电路中为电连接状态,每个电气节点的电压幅值相同。
本实施例中,当驱动电压VCP相对于电源VM降低2.25V时,场效应管M37由于过饱和电压大于阈值电压而导通,Comp2跳变为逻辑高;当驱动电压VCP充电到大于该跳闸点后,场效应管M37关断,Comp2跳变为逻辑低电平;当驱动电压VCP相对于电源VM降低约400mV时,场效应管M35由于过饱和电压大于阈值电压而导通,Comp1跳变为逻辑高;当驱动电压VCP的充电电压大于第二阈值时,达到电源VM+5V的电平时,场效应管M35关断,Comp1跳变为逻辑低电平,本实施例中的第二阈值为电源VM的电压与上5V电压的和为第二阈值;因此反馈模块在驱动电压比电源VM小第一阈值时向死区控制模块输入高电平的反馈信号,在驱动电压比电源VM大第二阈值时向死区控制模块输入低电平的反馈信号。
可选地,在某种实施方式中,第一阈值和第二阈值的值相同。
本发明的工作流程如下:电容C1的上极板压降为VM,下极板为地电位,此时电荷泵模块通过场效应管M4和M1的寄生二极管D4和D1为电容C1正向充电,电容C1上积累的电荷为:QC1=C1×VM;电容C1在正向充电一段时间后,电荷泵模块路进入下一状态,此时电容C1的下极板压降为VM,上极板连接到VCP上,同时C2的也接入电路中,与C1串联连接到VM上,此时电荷泵模块通过场效应管M2和M3的寄生二极管D2和D3为电容C1逆向泵电,由于电荷守恒定律,在C1逆向泵电的过程中,多出的电荷会保存到C2上,由于C2的下极板压降为VM,故C2的上极板电平被泵到高于VM的电位上。此时C2上积累的电荷量约等于上一相C1上积累的电荷量QC1,驱动电压VCP的大小参照如下公式:
从而完成电荷泵升高电压的功能。其中电荷泵模块的状态改变由场效应管M1、M2、M3和M4的通断控制,因此只需通过控制第三时钟信号CLK1、第三时钟信号CLK2、第三时钟信号CLK3和第三时钟信号CLK4的高电平占空比和频率便能控制电荷泵模块的状态改变频率,即调节电容C1的正向充电和逆向泵电的频率。
综上,本发明通过反馈模块检测电荷泵模块输出的驱动电压,能够在驱动电压过高或者过低时进行调节,确保输出的驱动电压的幅值能够始终满足驱动电路的要求,因此本发明能够100%占空比全周期的向驱动电路提供驱动电压,能够在驱动电压的幅值过低时进行调节保护;其次本发明通过电容C1的正向充电和逆向泵电来输出驱动电压,而电容C1的正向充电和逆向泵电由场效应管M1、M2、M3和M4的通断控制,因此只需控制CLK1、CLK2、CLK3和CLK4的波形频率便能控制电容C1的正向充电和逆向充电的速度。
上述依据本发明为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
- 电荷泵电路以及包括该电荷泵电路的内部电压产生电路
- 电荷泵电路的参考电压产生电路及电荷泵电路