一种花生芽生产工艺
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及花生芽培养领域,特别是涉及一种花生芽生产工艺。
背景技术
现有的花生芽生产工艺生产出的花生芽质量参差不齐,良品率不高,存在很多次品,影响生产效益。
发明内容
针对上述问题,本发明提供了一种花生芽生产工艺,具有成品率良好,生产效益高的优点。
本发明的技术方案是:
一种花生芽生产工艺,包括以下步骤,
S1、将花生芽铺种在栽培盘中;
S2、将栽培盘码垛并捆扎,放入立芽室催芽;
S3、对花生芽进行补水,补水量为400mL-600mL;
S4、将花生芽继续放置于立芽室中立芽;
S5、待花生芽立起后,将花生芽放置于栽培室中;
S6、切除花生芽的根茎部分。
在进一步的技术方案中,步骤S1中,铺种花生芽的方法如下,
S11、准备栽培盘,并向栽培盘内均匀铺撒一层锯末基质,将超过栽培盘盘口的多余锯末基质扫平;
S12、压紧锯末基质并淋水;
S13、向栽培盘内再均匀铺撒一层花生种子;
S14、在栽培盘的顶部放置泡沫板。
在进一步的技术方案中,步骤S11中,栽培盘的锯末基质与花生芽的重量比为500-1000:200-250。
在进一步的技术方案中,栽培盘的锯末基质与花生芽的重量比为500:220。
在进一步的技术方案中,步骤S3中,补水量为500mL,补水时去掉栽培盘顶部的泡沫板。
在进一步的技术方案中,步骤S2、S4中,立芽室的立芽温度为25℃-26℃,立芽天数为1d-2d。
在进一步的技术方案中,步骤S5中,将花生芽转运至栽培箱,并进行补水后,再放置于栽培室中。
在进一步的技术方案中,栽培箱的补水量为500mL,栽培室的栽培温度为25℃-26℃,栽培天数为4d-5d。
在进一步的技术方案中,步骤S6中,在对花生芽进行切根之前,还包括如下步骤:
待栽培室内的花生芽长至16cm-20cm时,进行采摘。
在进一步的技术方案中,还包括以下步骤:
S7、切根后的花生芽放置于预冷室中,预冷室的温度为6℃-10℃,预冷天数为1d-5d。
上述技术方案的工作原理如下:
将花生芽和锯末基质铺在栽培盘内,码垛并捆扎好后放入立芽室催芽,1天-2天后对栽培盘进行补水,补水量为500mL,继续将栽培盘放置立芽室立芽1-2天,待花生芽立起后,装入栽培箱,并在栽培箱补入500mL的水分,再把栽培箱移动至栽培室4-5天,待花生芽长至16-20cm时进行采摘,将采摘完毕的花生芽切除根茎后放入预冷室1-5天做预冷处理,即可装箱打包。
本发明的有益效果是:
本发明采用铺种-催芽-补水-立芽-栽培-采摘-切根-预冷的生产工艺,确保花生芽成品率良好,生产效益高。
附图说明
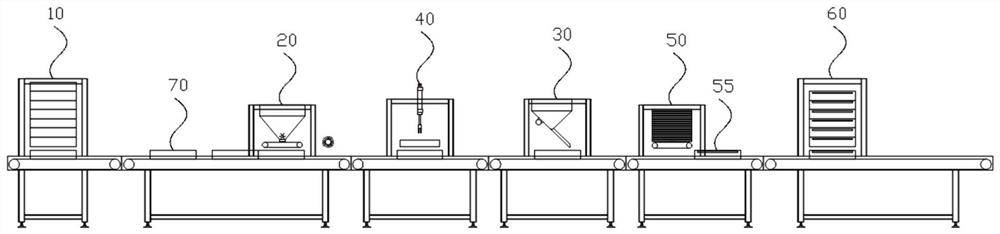
图1是本发明所述布种生产线的结构示意图;
图2是本发明所述自动分盘上盘机的正视示意图;
图3是本发明所述自动分盘上盘机的侧视示意图;
图4是本发明所述锯末自动布料机的正视示意图;
图5是本发明所述锯末自动布料机的侧视示意图;
图6是本发明所述自动下种机的正视示意图;
图7是本发明所述自动下种机的侧视示意图;
图8是本发明所述自动压实机的正视示意图;
图9是本发明所述自动压实机的侧视示意图;
图10是本发明所述自动铺板机的正视示意图;
图11是本发明所述自动铺板机的侧视示意图;
图12是本发明所述自动码垛机的正视示意图;
图13是本发明所述自动码垛机的侧视示意图;
图14是本发明所述补水装置的正视示意图;
图15是本发明所述切根装置的结构示意图。
附图标记说明:
10、自动分盘上盘机;11、第一机架;12、第一传送带;13、第一导向限位机构;14、气动装置;15、第一光电感应器;16、第一驱动电机;20、锯末自动布料机;21、第二机架;22、第二传送带;23、布料传送带;24、第一料斗;25、第二光电感应器;26、填料电机;27、第二驱动电机;28、隔板;30、自动下种机;31、第三机架;32、第三带传动带;33、布种传送带;34、第二料斗;35、第三光电感应器;36、第三驱动电机;40、自动压实机;41、第四机架;42、第四传送带;43、立杆;44、第一驱动装置;45、第四光电感应器;46、第四驱动电机;50、自动铺板机;51、第五机架;52、第五传送带;53、铺板传送带;54、第二导向限位机构;55、泡沫板;56、第二动力装置;57、第五光电感应器;58、第五驱动电机;60、自动码垛机;61、第六机架;62、第六传送带;63、第三导向限位机构;64、第二驱动装置;65、第六驱动电机;70、培养盘;80、补水装置;81、第七机架;82、第七传送带;83、第六光电感应器;84、喷淋机构;90、切根装置;91、切根架;92、分离架;93、收集架;94、收入传送带;95、输出传送带;96、花生培养槽。
具体实施方式
下面结合附图对本发明的实施例作进一步说明。
实施例:
一种花生芽生产工艺,包括以下步骤,
S1、将花生芽铺种在栽培盘中;
S2、将栽培盘码垛并捆扎,放入立芽室催芽;
S3、对花生芽进行补水,补水量为400mL-600mL;
S4、将花生芽继续放置于立芽室中立芽;
S5、待花生芽立起后,将花生芽放置于栽培室中;
S6、切除花生芽的根茎部分。
本实施例中,补水和切根,分别在补水装置80和切根装置90上进行。
如图14所示,补水装置80:
补水装置80包括第七机架81,第七机架81的顶部设有第七传送带82,第七传送带82的一侧连接有驱动传送带转动的动力装置,第七传送带82的顶部设有喷淋机构84,喷淋机构84包括淋水管道,淋水管道通过软管连接有水箱,淋水管道上设有若干喷头,喷头与第七传送带82对应,喷淋机构还设有第六光电感应器83;
若干栽培盘70成排放置在第七传送带82上,动力装置带动传送带转动,栽培盘经过第六光电感应器83时,喷淋机构84打开,喷头淋水,栽培盘70通过第六光电感应器83后,喷淋机构84关闭,待下一栽培盘70经过第六光电感应器83时,喷淋机构84再次打开,重复上述步骤若干次,对放置在第七传送带82上的所有栽培盘70补水
如图15所示,切根装置90:
切根装置90包括花生培养槽96、工作部和传送部,工作部包括切根架91、分离架92和收集架93,切根架91和收集架93分别设于分离架92的两端,切根架91的顶部设有支架,支架上设有伸缩叉,伸缩叉与切根架91的顶部平行,伸缩叉包括第一伸缩杆、叉柄和多个叉片,叉片与支架贴合、第一伸缩杆、叉柄和叉片沿切根架91的长度方向依次设置,第一伸缩杆和叉片分别与切根架91的长度方向平行,切根架91的中部设有切刀,切刀与第四伸缩杆连接,第四伸缩杆的伸缩方向与第一伸缩杆平行,切刀与切根架91的顶部平行;分离架92包括底板、第二伸缩杆和顶板,顶板上设有中间传送带,第二伸缩杆垂直设于底板和顶板之间;收集架93中部设有收集槽和第三伸缩杆,收集槽设于收集架93靠近分离架92的一端,第三伸缩杆与收集槽可拆卸连接,第三伸缩杆的伸缩方向与收集架93的长度方向平行;传送部包括输入传送带和输出传送带95,输入传送带和输出传送带95分别设于分离架92的另外两端,输入传送带的高度大于输出传送带95的高度,输入传送带的高度大于分离架92的最小高度。
花生种植时需在花生培养槽96排列整齐,与伸缩叉的叉片的间距配合,对花生芽进行切根时,将花生培养槽96放在输入传送带上,传送带将花生培养槽96运输至分离架92的顶板上,伸缩叉的叉片的间距大于茎部的宽度小于子叶的宽度,切根架91顶部的伸缩叉伸至花生芽的子叶和茎部之间;之后分离架92的顶板随第二伸缩杆向分离架92的底板方向收缩,伸缩叉将花生芽的子叶托起,将花生芽的茎部与切刀对齐,第四伸缩杆带动切刀对花生芽进行切根处理,切根后切刀回到原位,切根后的子叶被留在叉片上,分离架92顶板上的中间传送带启动,将花生培养槽96运送至输出传送带95,由工作人员收集,运走花生培养槽96后,第三伸缩杆将收集槽推至分离架92的顶板上,第一伸缩杆带动伸缩叉收缩,收缩时支架将伸缩叉上的子叶推落入收集槽中,伸缩叉收缩完毕后,收集槽收缩回原位,分离架92上升回原位,完成一个流程。
在另外一个实施例中,如图2-13所示,步骤S1中,铺种花生芽的方法如下,
S11、准备栽培盘70,并向栽培盘70内均匀铺撒一层锯末基质,将超过栽培盘70盘口的多余锯末基质扫平;
S12、压紧锯末基质并淋水;
S13、向栽培盘70内再均匀铺撒一层花生种子;
S14、在栽培盘70的顶部放置泡沫板55。
本实施例中,如图1所示,铺种工序在一条长达8-12m的布种生产线上进行,布种生产线包括依次设置的自动分盘上盘机10、锯末自动布料机20、自动压实机40、自动下种机30、自动铺板机50和自动码垛机60,首先通过自动分盘上盘机10将培养盘70有序的一个一个的布置在传送带上,然后通过锯末自动布料机20,自动向培养盘70添加锯末作为培养基质,通过自动压实机40将种子压实,再通过自动下种机30向具有培养基质的培养盘70中放置种子后,自动铺板机50自动铺板,最后通过自动码垛机60将完成布种的培养盘70进行收集。
如图2-3所示,自动分盘上盘机10:
自动分盘上盘机10包括第一机架11和均设于第一机架11上的第一传送带12和第一导向限位机构13,第一传送带12设于第一机架11的顶部,第一机架11上设有用于驱动第一传送带12转动的第一驱动电机16,第一驱动电机16与第一传送带12之间通过皮带实现动力连接,第一导向限位机构13的长度方向垂直于第一传送带12的长度方向,且第一导向限位机构13设于第一传送带12的顶部。
第一导向限位机构13包括呈2x2的矩阵式分布的四个安装架,第一传送带12的两侧分别竖直安装有两个安装架,位于第一传送带12同一端的两个安装架之间设有安装板,安装板包括上板和下板,上板和下板的距离大于培养盘70的高度,安装板的长度方向与第一传送带12的宽度方向平行。
位于第一传送带12同一端的安装板上设有两个竖直方向上叠放的气动装置14,气动装置14包括气缸和伸缩杆,伸缩杆的端部设有托块,两个伸缩杆端部的托块托起一个培养盘70,伸缩杆收缩时,培养盘70落在第一传送带12上,随着传送带进入下一个工序,以第一传送带12的转动方向为前端,位于第一传送带12前端的安装架的底部设有第一光电感应器15,利用第一光电感应器15可以控制四个气动装置14上伸缩杆的运动。
运送花生芽的培养盘70时,将花生芽的培养盘70从第一导向限位机构13的顶部放至第一导向限位机构13的安装板上,此时第一光电感应器15未感应到第一传送带12上有培养盘70,第一光电感应器15对气动装置14发送电位信号,气动装置14作出伸出或缩回伸缩杆的动作。
气动装置14的伸缩杆伸长时,培养盘70由上板的气动装置14的托块托住,气动装置14的伸缩杆收缩时,培养盘70从上板落至下板,气动装置14的伸缩杆再次伸长托住培养盘70,位于上板上的气动装置14的伸缩杆托住新的培养盘70,气动伸缩杆再次伸缩时,下板的培养盘70落至第一传送带12,此时第一光电感应器15感应到第一传送带12上有培养盘70,气动装置14的伸缩杆保持伸长,托块托住上板和下板培养盘70,待第一传送带12上的培养盘70传出后,再重复以上动作,可完成培养盘70的运输。本技术方案运用第一光电感应器15、气动装置14和第一传送带12实现了培养盘70的高效运输,节省了人力资源和时间,提高了工作效率。
如图4-5所示,锯末自动布料机20:
锯末自动布料机20包括第二机架21、第二传送带22、布料传送带23和第一料斗24,第二机架21为型材制成的长方体形框架,第一传送带12设于布料传送带23的底部,第一传送带12的长度方向、布料传送带23的长度方向和第二机架21的长度方向均一致,用于培养作物的培养盘70放置于布料传送带23上,布料传送带23和第二传送带22之间具有大于培养盘70高度的间隙,布料传送带23与第二传送带22的转动方向相同。
布料传送带23由填料电机26驱动,第二传送带22由第二驱动电机27驱动,第二驱动电机27设于第二机架21的一端上,培养盘70经过前序工序达到第二传送带22上,填料电机26和第二驱动电机27位于第二机架21的同一端上。
布料传送带23上设有多个间隔相同的隔板28,两个相邻的隔板28形成一个横槽,横槽的长度方向与布料传送带23的长度方向垂直。
第一料斗24呈漏斗状,第一料斗24的放料口在布料传送带23的顶部,同时第一料斗24的放料口呈长方形,且放料口的长度方向与布料传送带23的长度方向垂直,放料口的长度不大于横槽的长度。
将需要布设的基质放置在第一料斗24中,第一料斗24中的基质落入布料传送带23上的横槽中,基质随着横槽一起运动,将培养盘70放置在布料第二传送带22上,待培养盘70运动到布料传送带23的下方,横槽内的基质落入盘放置中,同时横槽两侧的挡板可以用于铺平基质。
锯末自动布料机20还包括第二光电感应器25,第二光电感应器25设于布料传送带23与第二传送机构之间,第二光电感应器25设于布料传送机构的一端,培养盘70放置在第二传送带22的一端上时,培养盘70随着第二传送带22运动,直至培养盘70的前端靠近布料传送带23的一端,设布料传送带23的此端为尾端,布料传送带23的另一端为头端,当第二光电感应器25感应到培养盘70在布料传送带23正下方时,第二传送带22停止转动,第布料送带转动,将横槽内的基质有序的布设在培养盘70中。
第二光电感应器25设置在布料传送带23的头端,当第二光电感应器25感应到培养盘70的前端时,即可控制第二传送带22停止运动,同时控制第一料斗24放料和布料传送带23运动。
如图6-7所示,自动下种机30:
自动下种机30包括第三机架31,第三机架31上设有横置的第一底板,第一底板远离第三机架31的一侧面上设有第一凹槽,第一凹槽内设有用于运输培养盘70的第三带传动带32,第三带传动带32由第三驱动电机36驱动,第一底板上设有第二料斗34,第二料斗34的靠近第三传送带的一端上设有供培养盘70通过的开口,第二料斗34远离第一底板的一端设有进料口,第二料斗34的内部设有用于运输种子的布种传送带33,进料口与布种传送带33之间具有间隙,第二料斗34的内侧壁上设有分流器,分流器靠近布种传送带33的输出端,第二料斗34上设有用于感应培养盘70位置的第三光电感应器35。
操作时,先在进料口内放置需要进行布置种子,然后培养盘70从上一个工序进入到设置在第三机架31上的第一底板凹槽内的第三传送带上,随着第三传送带运动,经第二料斗34上的开口进入第二料斗34的内部,当培养盘70经过设置在第二料斗34上的第三光电感应器35时,布种传送带33开始运转,将布种传送带33上的种子从输出端输出,经分流器的分流整合,掉至培养盘70内,由于第三传送带没有停止运动,因此,种子会铺满整个培养盘70,当培养盘70离开第三光电感应器35的感应范围后,布种传送带33停止运作,种子停止掉落,培养盘70继续在第三传送带上运动,直至下一个工序。
布种传送带33的传送带上设有若干第二凹槽,布种传送带33的输入端低于输出端。通过设置第二凹槽,使得种子能够对应掉入至第二凹槽内,然后从布种传送带33的输出端掉入至培养盘70内,通过使布种传送带33的输入端低于输出端,可使种子在传送过程中不出现因滑落而导致混乱的情况。
为了防止过多的花生芽同时从输出端输出,造成混乱布种的问题,传送带与进料口之间的间隙比种子小;通过在第二料斗34的外侧壁上设置张紧装置,用于调整布种传送带33中传送带的松紧程度,避免传动带打滑,减小传送阻力通过在第一底板上设置挡板,防止培养盘70在移动过程中出现偏移掉落的情况。
如图8-9所示,自动压实机40:
自动压实机40包括第四机架41、立杆43和第四传送带42,第四传送带42设于第四机架41的顶部,第四传送带42由第四驱动电机46驱动,第四机架41由型材制成的长方体形框架,第四机架41的长度方向与第四传送带42的长度方向一致,第四机架41顶部的两侧分别设有两个立杆43,四个立杆43的顶部设有固定块,固定块上设有第一驱动装置44,该第一驱动装置44由气缸和活塞杆构成,第一驱动装置44的气缸一端端部固定在固定块上,第一驱动装置44的活塞杆的端部竖直向下,活塞杆的输出端端部设有压板,立杆43设于第四机架41的一端上设有第四光电感应器45。
操作时,第四传送带42运行,培养盘70随着第四传送带42及从壳体的开槽处进入到壳体的内部,当培养盘70运动至第四光电感应器45的感应范围时,固定块上的活塞杆开始运作,推动活塞杆,使得活塞杆上的压板压向培养盘70内,在活塞杆下降过程中,压板将种子压紧,然后回升,培养盘70则从壳体的另一个开口处运行出去,进入到下一个工序。
两个相对的立杆43内侧之间设有可旋转的第一转轮和第二转轮,第一转轮和第二转轮之间设有保护带,保护带的两端分别圈设在第一转轮和第二转轮上,壳体的内侧壁设有限位轮,第一转轮和第二转轮的连心线平行于固定块,可防止保护带与压板接触的部位出现应力集中而造成保护带损坏的情况。限位轮靠近保护带朝向固定块的一端,用于限制保护带的位置,使得保护带能够减小所受到的张力而导致其被破坏。固定块上设有挡板,可用于防止培养盘70在传送过程中出现位置偏移以及滑落的情况。第四传送带42中设有第四转轮,可用于将第四传送带42中的传送带的中间部分撑起,防止压紧过程中,造成下降的情况。
如图10-11所示,自动铺板机50:
自动铺板机50包括第五机架51,第五机架51的顶部设有第二导向限位机构54,第二导向限位机构54由四根竖直设于第五机架51上的第一限位柱构成,第五机架51的顶部设有第五传送带52,第五传送带52由第五驱动电机58驱动,第五机架51靠近第五传送带52传送方向的初始位置设有第五光电感应器57,第五机架51靠近第五传送带52传送方向的末端设有限位挡板,第五机架51的侧壁设有伸缩气缸,伸缩气缸的活塞端与限位挡板连接,第五传送带52的底部设有铺板传送带53,第五机架51靠近铺板传送带53传送方向的末端设有第五光电感应器57。
将泡沫板55放置于第二导向限位机构54内,四根第一限位柱形成的限位空间的大小与泡沫板55的大小匹配,栽培盘放置于铺板传送带53上,栽培盘经过第五光电感应器57时,第五传送带52转动,将落在第五传送带52上的泡沫板55传输至限位挡板上后,第五传送带52停止转动,栽培盘经过第五光电感应器57时,伸缩气缸的活塞端回缩,泡沫板55向下掉进栽培盘内后,伸缩气缸的活塞端回程,铺板传送带53继续转动,将栽培盘送入下一工序。
第五传送带52套设在两根转轴上,其中一根转轴连接有供其转动的第一动力装置,第一动力装置为减速电机。铺板传送带53套设在四根转轴上,其中一根转轴连接有供其转动的第二动力装置56,第二动力装置56为皮带轮传动。通过上述技术方案,具有自动化铺板的优点,提高效率并且降低了人力成本。第五传送带52上设有凸起挡板。设置凸起挡板,当泡沫板55从第二导向限位机构54掉在第五传送带52时,凸起挡板带动泡沫板55向前运动。限位挡板和伸缩气缸的数量均为两个,两个伸缩气缸位于第五机架51长度方向的相对两侧,两个限位挡板分别与两个伸缩气缸的活塞端连接。设置两个限位挡板,泡沫板55宽度方向的两侧分别与限位挡板的顶部贴紧,伸缩气缸回缩后,泡沫板55能更好地掉进栽培盘内。第五传送带52沿其长度方向的相对两侧分别设有第二限位柱。第二限位柱形成的限位空间的宽度与泡沫板55的宽度相匹配,通过设置两个第二限位柱,横向限制泡沫板55的位移。
如图12-13所示,自动码垛机60:
自动码垛机60包括第六机架61和第六传送带62,第六传送带62由第六驱动电机65驱动,第六传送带62设于第六机架61的顶部,第六机架61上设有第三导向限位机构63,第三导向限位机构63由四个支撑架,支撑架上设有第二驱动装置64,第二驱动装置64上设有抬升板。
四个支撑架分别设在第六支架的两侧,呈2x2阵列式分布,位于第六传送带62同一侧的两个支撑架之间设有多个平行设置的抬升板,第二驱动装置64为气动装置14,包括气缸和活塞杆,利用启动装置的活塞杆驱动抬升板,将培养盘70进行提升,从而使培养盘70堆叠。
在另外一个实施例中,步骤S1中,栽培盘70的锯末基质与花生芽的重量比为500-1000:200-250。
在另外一个实施例中,栽培盘70的锯末基质与花生芽的重量比为500:220。
在另外一个实施例中,步骤S3中,补水量为500mL,补水时去掉栽培盘顶部的泡沫板。
在另外一个实施例中,步骤S2、S4中,立芽室的立芽温度为25℃-26℃,立芽天数为1d-2d。
在另外一个实施例中,步骤S5中,将花生芽转运至栽培箱,并进行补水后,再放置于栽培室中。
在另外一个实施例中,栽培箱的补水量为500mL,栽培室的栽培温度为25℃-26℃,栽培天数为4d-5d。
在另外一个实施例中,步骤S6中,在对花生芽进行切根之前,还包括如下步骤:
待栽培室内的花生芽长至16cm-20cm时,进行采摘。
在另外一个实施例中,还包括以下步骤:
S7、切根后的花生芽放置于预冷室中,预冷室的温度为6℃-10℃,预冷天数为1d-5d。
以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种利用花生芽浆制备的花生芽酸奶及其制备方法
- 一种花生芽栽培盘及包括其的花生芽栽培装置