一种防入侵人工智能雷达视频监控系统
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及人工智能与雷达技术应用技术领域,具体涉及一种防入侵人工智能雷达视频监控系统。
背景技术
跑道入侵防范(runway incursion)是指发生在机场的对飞机跑道安全产生不利影响的事件。对跑道入侵的定义目前是由国际民用航空组织(ICAO) 于2006年4月27日规定的:在机场中发生的任何涉及错误的出现在用于飞机起飞和降落的保护区表面的飞机,车辆以及行人的事件。
民航业的迅速发展,重点区域入侵事件时有发生,成为当今困扰民航界的重大安全问题。
一、目前跑道入侵防范方式主要有以下几种:
1、通过人工主动干预防止跑道入侵。
机场通过加强管制员的专业技术训练、强化管制员与飞行员的沟通交流等措施在一定程度上能防止跑道入侵,但对人员要求较高,且人难免犯错。依靠人工控制的方法极易受到飞行员、管制员、车辆驾驶员等的人为因素影响。
2、通过安装告警设备防跑道入侵
现有的防跑道入侵系统主要有场面监视雷达、多点定位系统、ADS-B。这几种系统存在以下缺点:1、均没有主动识别入侵目标类型的功能,需配合车载或者机载应答设备才能够定位侵入目标并识别其类型。2、当有人或动物侵入跑道时现有的系统无法分辨侵入动物类型,不便于管制员判断并采取应对措施。
3、现有系统均不能实时显示侵入目标的视频图像,不利于跑道管理部门及时排除侵入物。
二、目前机场围界防范入侵系统,主要通过振动检测,红外线电子围栏等方式探测入侵目标。但此方式存在检测定位精度低、人员靠近无预警、跨越后无法持续跟踪的缺点,不利于管理部门及时定位并排除侵入物。
发明内容
为了解决上述问题,本发明实施例致力于提供跑道防范入侵人工智能雷达视频监控系统实现全天候实时监控,以防止出现因人员疏漏导致的侵入事件。
根据本公开实施例,提供了一种防入侵人工智能雷达视频监控系统,其特征在于,所述视频监控系统包括:
监测端,其包括,雷达设备、预设数量的固定摄像机及预订数量的云台摄像机;
处理端,其包括,雷达工作站、数据服务器及显示终端;
交换机;所述监测端通过所述交换机与所述处理端进行数据的传输和交互。
进一步地,
雷达设备,用于获取入侵目标的雷达数据;
雷达工作站,用于接收所述雷达数据并对所述雷达数据进行解析得到目标解析数据,并将入侵目标的运动轨迹进行显示;
固定摄像机及云台摄像机,用于获取目标影像数据;其中,所述固定式摄像机用于提供宽视角的全景图像,所述云台摄像机用于根据数据服务器指令输出的图像供数据服务器识别;
数据服务器,用于对所述目标解析数据及目标影像数据进行处理;
终端设备,用于显示所述数据服务器处理后得到的入侵目标的实时全景监控图像、跟踪监控图像。
进一步地,所述雷达数据包括,目标坐标、目标运动方向角、目标运动速度、目标ID、目标出现时间、雷达ID及雷达坐标信息队列。
进一步地,所述数据服务器包括:
目标侵入判别模块,用于通过所述目标坐标判断目标是否进入监控区域;
固定摄像机处理模块,用于向所述显示终端发送入侵目标的全景视频监控图像;
云台摄像机处理模块,用于控制云台摄像机实时跟踪监控入侵目标;
人工智能识别模块,用于对所述目标影像数据进行处理,判断入侵目标种类,并在图像中标注出目标种类。
进一步地,所述目标侵入判别模块包括:
第一分割单元,用于将所述监控区域分割为多个区域,依次编号作为全景区域;
第二分割单元,用于将每个全景区域分割为多个跟踪区域,并对所述跟踪区域编号;
判别单元,用于根据坐标判断入侵目标当前所在全景区域编号和跟踪区域编号。
进一步地,所述固定摄像机处理模块包括:
IP地址获取单元,用于读取入侵目标所在全景区域编号后得到所述固定摄像机IP地址;
IP地址发送单元,用于向所述显示终端发送所述固定摄像机IP地址,以使所述显示终端根据所述固定摄像机IP地址得到入侵目标的全景视频监控图像。
进一步地,所述显示终端还包括:
告警单元,当发现入侵目标时,所述告警单元发出告警。
进一步地,所述雷达设备中雷达的数量按照雷达覆盖范围和监控区域的面积确定,以能够完全覆盖监控区域为准。
进一步地,所述云台摄像机根据数据服务器指令跟踪放大目标。
进一步地,所述所述视频监控系统用于跑道、机场围界及机场道口。
有益效果:
本发明通过有效的结合雷达定位技术、视频监控技术以及人工智能视觉技术应用于区域入侵防控,能够主动识别入侵目标类型,不需需配合车载或者机载应答设备就能够定位侵入目标并识别其类型,便于判断并采取应对措施;本发明的视频监控系统能够实时显示侵入目标的视频图像,便于及时排除侵入目标,本发明的视频监控系统检测定位精度高、人员靠近时可预警、并可对入侵目标持续跟踪,便于及时排除入侵目标。
附图说明
通过结合附图对本申请实施例进行更详细的描述,本申请的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本申请实施例的进一步理解,并且构成说明书的一部分,与本申请实施例一起用于解释本申请,并不构成对本申请的限制。在附图中,相同的参考标号通常代表相同或相似的部件。
在本发明的描述中,需要理解的是,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
图1所示为本发明一实施例的一种防入侵人工智能雷达视频监控系统的结构示意图;
图2所示为图1中的数据服务器的结构示意图;
图3所示为图2中目标侵入判别模块的结构示意图;
图4所示为图2中固定摄像机处理模块的结构示意图。
具体实施方式
为了使本领域技术人员更加清楚地理解本发明的概念和思想,以下结合具体实施例详细描述本发明。应理解,本文给出的实施例都只是本发明可能具有的所有实施例的一部分。本领域技术人员在阅读本申请的说明书以后,有能力对下述实施例的部分或整体作出改进、改造、或替换,这些改进、改造、或替换也都包含在本发明要求保护的范围内。这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
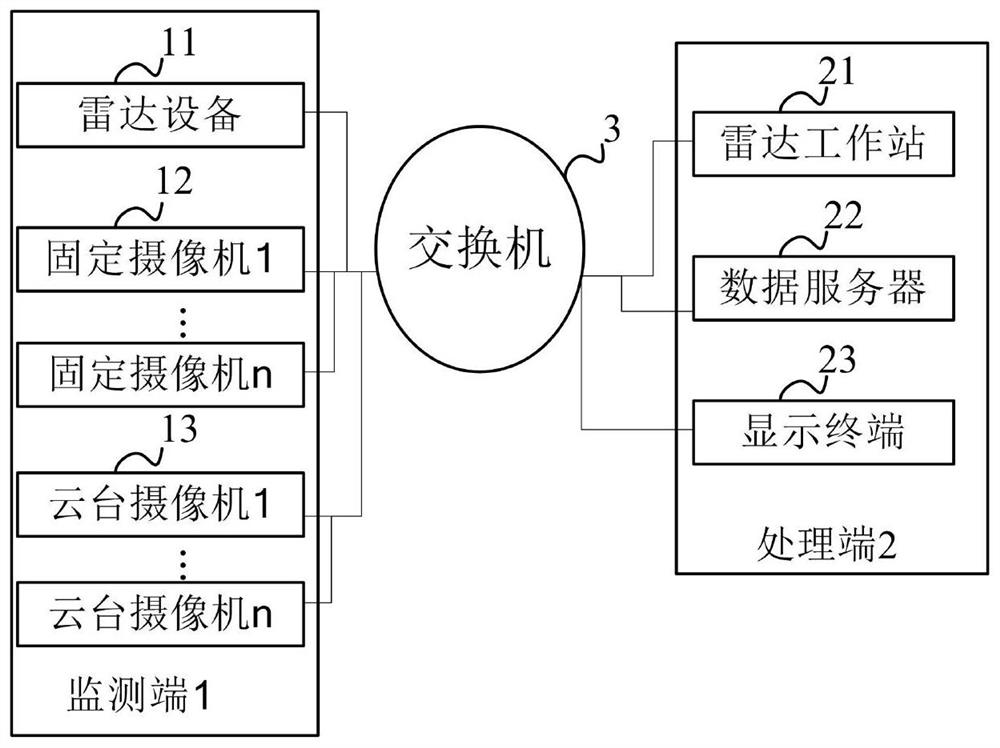
请参考图1,图1所示为一种防入侵人工智能雷达视频监控系统的结构示意图。
本实施例的视频监控系统包括:
监测端1,其包括,雷达设备11、预设数量的固定摄像机12及预订数量的云台摄像机13;
处理端2,其包括,雷达工作站21、数据服务器22及显示终端23;
交换机3;所述监测端通过所述交换机与所述处理端进行数据的传输和交互。
本实施例主要由雷达设备、雷达信息处理工作站、视频监控摄像机、数据处理服务器、通信链路设备、终端设备组成。通过有效的结合雷达定位技术、视频监控技术以及人工智能视觉技术应用于区域入侵防控,能够即时监控入侵事件发生。
如图1所示,在一些实施例中,
雷达设备11,用于获取入侵目标的雷达数据;
雷达工作站21,用于接收所述雷达数据并对所述雷达数据进行解析得到目标解析数据,并将入侵目标的运动轨迹进行显示;
固定摄像机12及云台摄像机13,用于获取目标影像数据;其中,所述固定式摄像机12用于提供宽视角的全景图像,所述云台摄像机13用于根据数据服务器22指令输出的图像供数据服务器22识别;
数据服务器22,用于对所述目标解析数据及目标影像数据进行处理;
显示终端23,用于显示所述数据服务器22处理后得到的入侵目标的实时全景监控图像、跟踪监控图像。
本实施例通过有效的结合雷达定位技术、视频监控技术以及人工智能视觉技术应用于区域入侵防控,不需需配合车载或者机载应答设备就能够定位侵入目标并识别其类型,便于判断并采取应对措施;本发明的视频监控系统能够实时显示侵入目标的视频图像,便于及时排除侵入物,本发明的视频监控系统检测定位精度高、并可对入侵目标持续跟踪,便于及时排除入侵目标。
在一些实施例中,所述雷达数据包括,目标坐标、目标运动方向角、目标运动速度、目标ID、目标出现时间、雷达ID及雷达坐标信息队列。
在本实施例中雷达用于定位入侵目标位置以、检测入侵目标运动方向角、入侵目标运动速度等数据;需要说明的是,需用雷达的数量按照雷达覆盖范围确定,以能够完全覆盖保护区为准,具体地,雷达数据通过无线网桥或者有线通信链路与系统交换机相连接进行数据的传输和交换。雷达工作站解析雷达数据并将侵入目标运动轨迹显示,处理后的数据(包含:坐标,运动方向角、运动速度、目标ID、出现时间、雷达ID、雷达坐标等相关信息)放入队列等待服务器使用。
如图2所示,在一些实施例中,所述数据服务器22包括:
目标侵入判别模块221,用于通过所述目标坐标判断目标是否进入监控区域;
固定摄像机处理模块222,用于向所述显示终端23发送入侵目标的全景视频监控图像;
云台摄像机处理模块223,用于控制云台摄像机13实时跟踪监控入侵目标;
人工智能识别模块224,用于对所述目标影像数据进行处理,判断入侵目标种类,并在图像中标注出目标种类。
具体地,如图3所示,所述目标侵入判别模块221包括:
第一分割单元2211,用于将所述监控区域分割为多个区域,依次编号作为全景区域;
第二分割单元2212,用于将每个全景区域分割为多个跟踪区域,并对所述跟踪区域编号;
判别单元2213,用于根据坐标判断入侵目标当前所在全景区域编号和跟踪区域编号。
本实例中数据处理服务器22作为本系统数据处理核心设备,包含不同功能的软件模块:侵入判别模块221、人工智能识别模块224、固定摄像机处理模块222、云台摄像机处理模块223。人工智能识别模块224读取消息队列得到侵入目标的坐标,通过坐标判断目标是否入侵保护区同时判断入侵目标的位置处于哪个全景区域和跟踪区域。固定摄像机222、云台摄像机223 处理模块调取监控图像送往人工智能识别模块224对监控图像进行处理,判断侵入目标种类并在图像中标注出目标种类,显示终端显示出全景图像、跟踪图像。
具体地,如图4所示,所述固定摄像机处理模块222包括:
IP地址获取单元2221,用于读取入侵目标所在全景区域编号后得到所述固定摄像机IP地址;
IP地址发送单元2222,用于向所述显示终端23发送所述固定摄像机12 的IP地址,以使所述显示终端23根据所述固定摄像机12的IP地址得到入侵目标的全景视频监控图像。
在一些实施例中,所述显示终端23还包括:
告警单元231,当发现入侵目标时,所述告警单元231发出告警。告警方式包括声音报警,光报警、同时光报警及声音报警,具体报警方式在此不做限定。
需要说明的是,所述雷达设备1中雷达的数量按照雷达覆盖范围和监控区域的面积确定,以能够完全覆盖监控区域为准。
需要说明的是,所述云台摄像机13根据数据服务器22指令跟踪放大目标。根据数据服务器22指令跟踪放大目标并输出的图像供人工智识别模块 224识别,每个固定摄像机的监控区域按照摄像机的性能设置,固定摄像机的使用数量按照监控区域面积进行调整,云台摄像机也需按照实际调整。
需要说明的是,所述所述视频监控系统用于跑道、机场围界及机场道口。
本发明通过有效的结合雷达定位技术、视频监控技术以及人工智能视觉技术应用于区域入侵防控,能够避免出现人为因素导致的入侵事件发生,同时完善机场现有防入侵系统中存在的不足。
下面以一较优的实施例对本发明的有益效果进行说明:
监控区域以机场跑道为例,本实例中跑道视频监控采用两种类型的摄像机。固定式摄像机12和云台摄像机13结合获取目标影像,固定摄像机12 每150米设置一台,每台摄像机监控150米跑道区域并进行编号。云台摄像机13每960米设置一台,每台云台摄像机13监控960米跑道,该段跑道被分为32个跟踪区域并对每个区域进行编号。云台摄像机13根据数据服务器 22指令跟踪放大目标,输出的图像用于人工智能识别。
本实例中数据处理服务器22是本系统数据处理核心设备,包含不同功能的软件模块:侵入判别模块221、人工智能识别模块224、固定摄像机处理模块222、云台摄像机处理模块223。人工智能识别模块224读取消息队列得到侵入目标坐标,通过坐标判断目标是否入侵保护区同时判断入侵目标的位置处于哪个全景区域和跟踪区域。固定摄像机处理模块222、云台摄像机处理模块223调取监控图像送往人工智能识别模块224对监控图像进行处理,判断侵入目标种类并在图像中标注出目标种类。在显示终端显示出全景图像、跟踪图像以及声音告警。
以上结合具体实施方式(包括实施例和实例)详细描述了本发明的概念、原理和思想。本领域技术人员应理解,本发明的实施方式不止上文给出的这几种形式,本领域技术人员在阅读本申请文件以后,可以对上述实施方式中的步骤、方法、装置、部件做出任何可能的改进、替换和等同形式,这些改进、替换和等同形式应视为落入本发明的范围内。本发明的保护范围仅以权利要求书为准。
- 一种防入侵人工智能雷达视频监控系统
- 一种铁路用壁挂式雷达光电集成周界防入侵系统支撑结构