基于手眼标定的异步多相机外参标定算法
文献发布时间:2023-06-19 11:06:50
技术领域
本发明属于视觉同时定位与建图领域,具体涉及一种基于手眼标定的异步多相机外参标 定算法。
背景技术
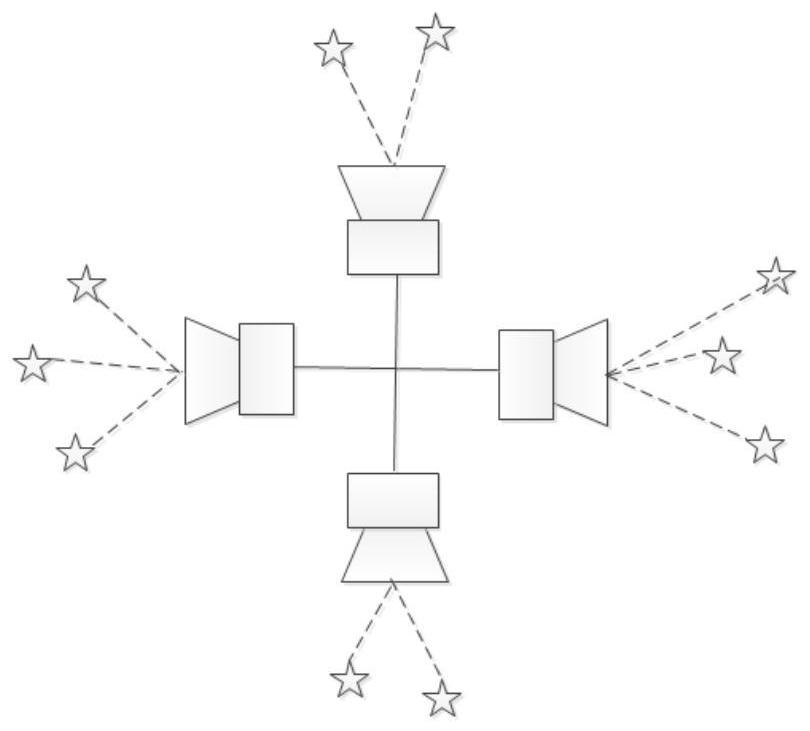
目前,使用多相机的视觉SLAM方法成为视觉SLAM的一个发展趋势,多相机系统一般 由任意数量的相机以任意的角度组合在一起,具有广阔的视野角,如图1所示为四个相机系 统的硬件示意图,各个相机通过机械装置固连,且相机之间无共同视野。在多相机SLAM系 统中,即使一个相机被遮挡,整个多相机系统的位姿仍然可以由其他相机的观测估计出来。 因此,使用多相机可以极大提高视觉SLAM的性能与鲁棒性。然而对于多相机SLAM系统来 说,相机之间的的重标定是一个必须要解决的重要问题,现有的方法需要多相机之间具有硬 件时间同步,且需相机间具有共同的视野,因此不适用于这种无共视区域的异步多相机系统 的标定。
手眼标定算法是应用于机器人领域的坐标系变换问题的算法,目前手眼标定问题已统一 表示为求解AX=XB的问题,其中A表示传感器1在某时刻内自身坐标系的位姿变换,B表 示传感器2在相同时间内自身坐标系的位姿变换,X表示传感器1和2之间的外参变换关系。 因此,在多相机系统中,可将任意两个相机之间设定为“手”“眼”关系,根据相同时间间隔 两相机之间的位姿变化量来进行外参标定。
B样条曲线由贝塞尔曲线演化而来,是一种根据采样时刻的已知观测量来推测非采样时 刻未知观测量的算法,其基本原理在于根据给点节点的测量值求解出控制点,进而拟合出曲 线,相比于分段线性插值算法,该算法具有平滑度高、连续可导的特性。
图优化算法本质上是一种优化算法,将优化问题以图的形式来表示,图由顶点和边组成, 记为G={V,E},其中V为顶点的集合,E为边的集合。一条边可以连接两个或多个顶点,对 顶点构建约束关系,从而优化待解决的问题。
发明内容
本发明的目的:本发明的目的在于对异步多相机系统进行外参标定,提出了一种基于手 眼标定的异步多相机外参标定算法。
为完成以上目的,本发明采用如下的技术方案:首先对待标定的多相机利用视觉惯性里 程计系统进行轨迹估计,分别得到具有实际尺度的多条运动轨迹。然后选取一个基准相机, 利用二次B样条插值的算法,以基准相机的时间戳为基准,计算出其他相机在基准相机每个 时间戳对应时刻的位姿。然后对除了基准相机之外的每一个相机,利用手眼标定的方法及图 优化的算法估算出其与基准相机之间的外参变换关系,最后根据每个相机与基准相机之间的 外参得到任意两相机之间的外参变换关系。
本发明的优点有:
本发明采用基于手眼标定的异步多相机外参标定算法,可实现无重叠视野的多相机之间 的外参标定,不要求相机间的硬件同步,不需要额外的标定板,且优化迭代保证了算法的精 度,因此本发明具有较好的易用性及通用性。
附图说明
图1多相机系统硬件示意图
图2不同相机VIO轨迹示意图
图3B样条插值示意图
具体实施方式
步骤一:利用视觉-惯性里程计系统进行相机轨迹的生成,从而得到在不同时刻各个相机 的位姿。具体的,通过数据预处理、初始化、局部BA、闭环检测以及全局BA五个过程,将 IMU和视觉里程计的残差和状态量放在一起进行优化,最后可以得到每个相机的具有实际尺 度的运动轨迹信息。如图2所示为系统所得两个相机轨迹示意图。
步骤二:对于异步相机而言,在相机a轨迹相邻两时间戳的t
(1)求出每两个端点之间形成线段的中点作为新的端点。
(2)假设原始两端点为P
P(t)=A
因此可得出二次B样条曲线为:
步骤三:通过B样条插值后,分别得到相机a、b在t
假设相机b坐标系到相机a坐标系的变换关系为T
进一步化简可得:
由于
因此式(8)可进一步写成:
根据式(10),根据每一组相同时间段内的两相机位姿变化量,即可求出N组两相机的外 参变换量。
步骤四:对每组数据进行统计,求出平均的外参变换值。对于外参的平移部分,对所有 组的数据进行加权求平均值,对于旋转部分,采用四元数平均的方法。将求取的平均值作为 估计的初始值,参与后续的优化。
步骤五:根据手眼标定方法,可得到N组外参T
根据(10),可在平移与旋转两方面构建六自由度的残差:
平移残差的构建:
旋转残差的构建:
其中(11)中根据平移的三个维度可构建三个残差,(12)中将旋转矩阵转换为旋转向量 的表示形式可以构建出三个残差。
步骤六:对基准相机与每个相机之间利用步骤二~步骤五进行外参标定,根据每个相机 与基准相机之间的外参关系得到任意两相机之间的外参变换关系,从而得到多相机系统的外 参变换关系。
根据上述算法,利用Euroc数据集进行仿真实验,首先通过VINS-Mono开源VIO算法对 数据集的左右目分别跑出两条轨迹,对关键帧的位姿进行保存,然后通过B样条算法,得到 左目每一时间戳对应的右目相机位姿,通过手眼标定算法得到1000组相机外参的估计值,求 平均后作为初始值,利用Ceres工具进行外参优化。仿真结果如下表所示,实验证明该方法 是有效的。
- 基于手眼标定的异步多相机外参标定算法
- 相机外参标定方法、装置及相机外参标定系统