全息固定视差的立体视程度量化装置
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及视觉训练领域,更具体地,涉及全息固定视差的立体视程度量化装置。
背景技术
当前,裸眼3D全息投影技术的运用十分广泛,涉及各个领域。在军事领域,3D全息投影技术可模拟战场环境,从而提供分析决策与行动的支持,真实且便携;在教育领域,可以突破时间和空间的限制,用动态的、具有时间性和故事性的虚拟影像来展现历史,真正达到学生参与体验,实现寓教于乐;在影视领域,3D全息影像技术能使人有更强的真实感,在超大屏幕的影院中,无需带上特制的眼镜,借助超大立体画面配合环绕立体声音效就能使观众有身临其境的感觉;在舞台效果上,能使观众直接看到舞台上立体的虚拟人物和景物,从而营造出亦幻亦真的视觉氛围,具有超级强烈的视觉冲击力。
但是人们对于全息影像中相同的固定视差的立体视影像却有着不同的识别程度,每个人对于相同视差的虚拟立体视影像的凹凸感是千差万别的,这就说明不同个体的双眼立体视功能整合能力不相同,但是无法评估和量化出每个人在立体虚拟全息影像中的立体视程度。
现有的技术中,中国发明专利CN102867304B公开了“双目立体视觉系统中场景立体深度与视差的关系建立方法”,公开日为2015年07月01日,先求出左右摄像机的内参数和相对旋转矩阵与平移矢量;然后分析双目立体视觉系统的主要误差来源与误差模型;接着分析主要误差对平行式双目立体视觉系统的基线长度和视差的影响;然后建立双目立体视觉系统的场景立体深度与视差的一般关系模型;再选取一定量的标定点,由激光测距仪获得深度信息,进行基于最小二乘法的标定,求出给定双目立体视觉系统场景立体深度与视差的关系模型;最后通过对应定匹配的方法,求出左右图像中的场景视差,从而实现场景立体深度的精确恢复和三维重建。该方案中,建立场景立体深度与视差的关系模型,求出左右图像中的场景视差,得到立体场景的三维重建信息,是对于双目已有的立体视场景的重建,且三维重建的流程复杂,本申请基于每个操作人员的不同立体视程度,来评估和量化全息影像中的固定视差。
发明内容
本发明为解决现有的方法无法评估和量化全息影像中的固定视差目标的立体视程度的技术缺陷,提供了全息固定视差的立体视程度量化装置。
为实现以上发明目的,采用的技术方案是:
全息固定视差的立体视程度量化装置,包括全息投影机构和测量机构,所述测量机构设置在所述全息投影机构上,用于直接量化全息影像中固定视差的立体视程度。
所述全息投影机构包括显示屏、全息屏和全息投影芯片,所述显示屏连接于全息屏的一侧,呈45°设置;全息投影芯片设置在所述显示屏中用于投放全息影像,所述测量机构设置在所述显示屏与全息屏的上方;
上述方案中,全息投影机构进行投放全息影像,操作人员观察全息影像,根据看到的虚拟影像的实际凹凸情况,操控测量机构测量出全息影像中固定视差目标在现实中的相对距离,通过操作人员独立操作测量机构来量化自己双眼的全息影像中固定视差目标的立体视程度,实用性强。
所述全息投影机构包括显示屏、全息屏和全息投影芯片,所述显示屏连接于全息屏的一侧,呈45°设置;全息投影芯片设置在所述显示屏中用于投放全息影像,所述测量机构设置在所述显示屏与全息屏的上方。
所述显示屏水平设置。
所述全息屏为全息玻璃或全息膜。
所述显示屏固定连接于全息屏的一侧。
所述测量机构包括光束发射器、轨道滑行器、滑轨和遥控器;所述滑轨设置在所述显示屏与全息屏的上方;所述轨道滑行器与所述滑轨滑动连接;所述光束发射器与所述轨道滑行器固定连接;所述遥控器与所述轨道滑行器无线连接。
还包括刻度尺,所述显示屏上表面设置有垂直于显示屏和全息屏的连接处的刻度尺,所述刻度尺与所述滑轨平行。
所述滑轨设置在所述刻度尺正上方。
所述光束发射器发射垂直于显示屏的光束。
所述遥控器与所述轨道滑行器通过蓝牙无线连接。
上述方案中,全息投影芯片通过显示屏将虚拟图像立体90度呈现在全息玻璃(全息膜)后,轨道滑行器可以通过遥控器控制在滑轨上运动,光束发射器设置在轨道滑行器上,发出一束竖直穿过全息玻璃(全息膜)的可见光,可见光的一端刚好落在刻度尺上。
操作人员站在装置前,观察全息玻璃后的虚拟立体影像,可以看到虚拟影像的凹凸情况,此时操作人员通过遥控器,控制轨道滑行器运动,将可见光移动到虚拟立体影像的最前端和最远端,并停留在刻度尺上,由此将虚拟的固定视差量化。
与现有技术相比,本发明的有益效果是:
本发明提供的全息固定视差的立体视程度量化装置,全息投影机构进行投放全息影像,操作人员观察全息影像,根据看到的虚拟影像的实际凹凸情况,操控测量机构测量出全息影像中固定视差目标在现实中的相对距离,通过操作人员独立操作测量机构来量化自己双眼的全息影像中固定视差目标的立体视程度,实用性强。
附图说明
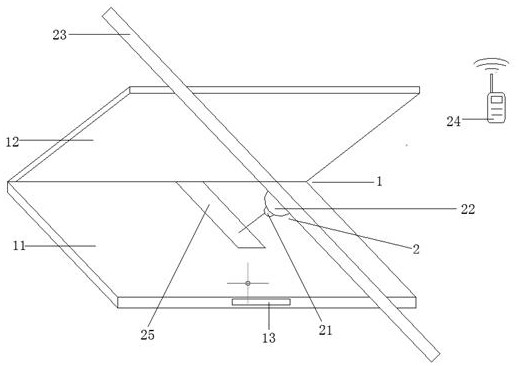
图1为本发明的装置结构图;
图2为本发明的装置侧视图;
附图标记说明:1、全息投影机构;2、测量机构;11、显示屏;12、全息屏;13、全息投影芯片;21、光束发射器;22、轨道滑行器;23、滑轨;24、遥控器;25、刻度尺。
具体实施方式
附图仅用于示例性说明,不能理解为对本专利的限制;
以下结合附图和实施例对本发明做进一步的阐述。
实施例1
如图1和图2所示,全息固定视差的立体视程度量化装置,包括全息投影机构1和测量机构2,所述测量机构2设置在所述全息投影机构1上,用于直接量化全息影像中固定视差目标的立体视程度。
上述方案中,全息投影机构1进行投放全息影像,操作人员观察全息影像,根据看到的虚拟影像的实际凹凸情况,操控测量机构2测量出全息影像中固定视差目标在现实中的相对距离,通过操作人员独立操作测量机构来量化自己双眼的全息影像中固定视差目标的立体视程度,实用性强。
所述全息投影机构1包括显示屏11、全息屏12和全息投影芯片13,所述显示屏11连接于全息屏12的一侧,呈45°设置;全息投影芯片13设置在所述显示屏11中用于投放全息影像,所述测量机构2设置在所述显示屏11与全息屏12的上方。
所述显示屏11水平设置。
所述全息屏12为全息玻璃或全息膜。
所述显示屏11固定连接于全息屏12的一侧。
所述测量机构2包括光束发射器21、轨道滑行器22、滑轨23和遥控器24;所述滑轨23设置在所述显示屏11与全息屏12的上方;所述轨道滑行器22与所述滑轨23滑动连接;所述光束发射器21与所述轨道滑行器22固定连接;所述遥控器24与所述轨道滑行器22无线连接。
还包括刻度尺25,所述显示屏11上表面设置有垂直于显示屏11和全息屏12的连接处的刻度尺25,所述刻度尺25与所述滑轨23平行。
所述滑轨23设置在所述刻度尺25正上方。
所述光束发射器21发射垂直于显示屏11的光束。
所述遥控器24与所述轨道滑行器22通过蓝牙无线连接。
实施例2
全息投影芯片13通过显示屏11将虚拟图像立体90°呈现在全息玻璃(全息膜)后,轨道滑行器22可以通过遥控器24控制在滑轨23上运动,光束发射器21设置在轨道滑行器22上,发出一束竖直穿过全息玻璃(全息膜)的可见光,可见光的一端刚好落在刻度尺25上。
操作人员站在装置前,观察全息玻璃(全息膜)后的虚拟立体影像,可以看到虚拟影像的凹凸情况,此时操作人员通过遥控器24,控制轨道滑行器22运动,手动将可见光移动到虚拟立体影像的最前端和最远端,并停留在刻度尺上,由此将虚拟的固定视差量化。
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 全息固定视差的立体视程度量化装置
- 全息固定视差的立体视程度量化装置