一种卷绕机双导丝装置
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及纤维卷绕机技术领域,具体涉及一种卷绕机双导丝装置。
背景技术
高性能碳纤维质轻,并且具有高强度、高模量、耐高温、耐腐蚀、抗冲刷、抗溅射等优良性能,还具有良好的可设计性和可复合性,是建造火箭、卫星、导弹、战斗机、舰船等装备必不可少的战略新兴材料。随着技术的进步,碳纤维在民用领域的应用越来越广,为了满足民用市场的需求和降低生产成本的需要,民用领域的碳纤维越来越朝着宽丝方向发展,48K及以上的碳纤维是当前重点发展的方向。碳纤维本身具有柔软、脆性的特征,48K纱是由48000根细小纤维组成的,在长度方向上虽有极强的拉断力,但在横向上极其脆弱,任何细小的外力,都会对它产生损伤,在生产过程中,须严格控制纤维横向方向上的外力干扰,此外,丝束成型的宽度的一致性,对后段工序影响极大。作为碳纤维生产线最后一道工序的卷绕机,负责将碳纤维卷绕成一个圆柱型的纱锭,供后段复合材料加工使用,纱锭卷绕成型的质量,将直接影响后段复合材料的质量,所以在卷绕这一环节,要求碳纤维无损伤、宽度一致、纱锭成型完好。
现有技术中的卷绕机,只有一个往复导丝装置,并且不管其针对纤维(丝束)的不同而做任何改变,都无法改变往复导丝装置带动纤维往复摆动的角度α太大,由于受到各方面及本身设计的高度限制,无法将α减小,使得纤维在进丝轮和往复导丝装置的导丝器上横向摩擦大,张力变化也随之变大,容易产生蹭丝和丝宽变化,如图5所示。此外,纤维在往复运动时,在进丝轮处往复摆动,使得纤维在进丝轮处容易产生“蹭丝”,影响纤维的品质。
发明内容
针对现有技术中存在的技术问题,本发明的目的是:提供一种卷绕机双导丝装置,第一往复导丝装置和第二往复导丝装置同时往复运动,能够减小往复导丝装置带动纤维往复摆动的角度,避免蹭丝和伤丝。
为了达到上述目的,本发明采用如下技术方案:
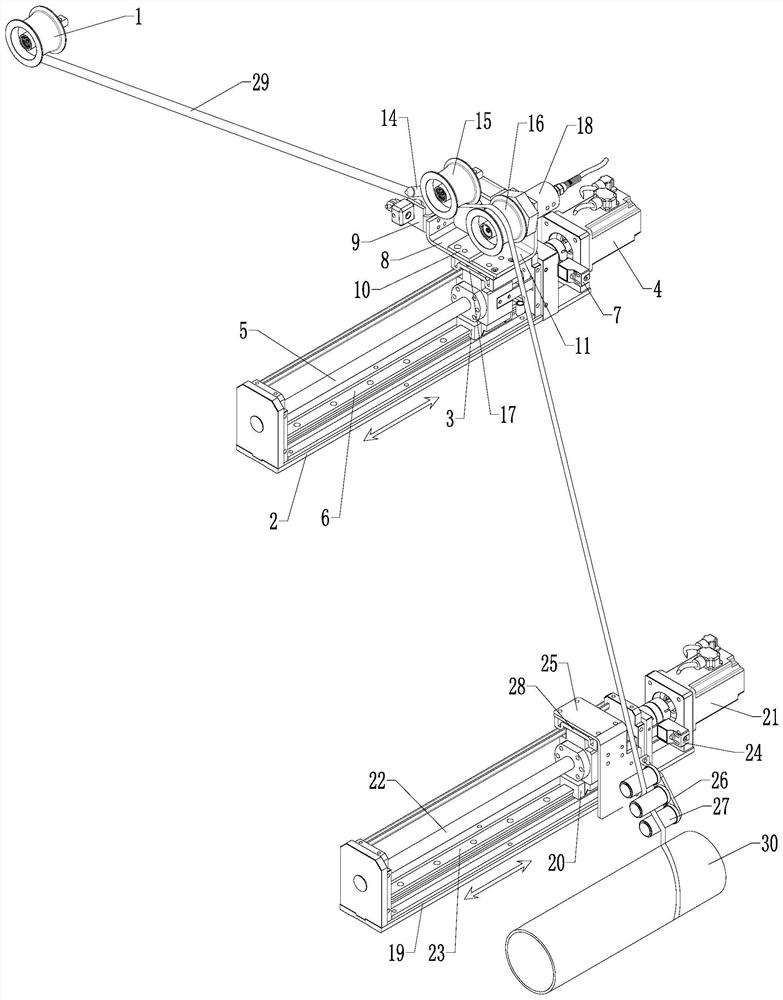
一种卷绕机双导丝装置,包括第一往复导丝装置和第二往复导丝装置,第一往复导丝装置与第二往复导丝装置平行设置,第一往复导丝装置位于第二往复导丝装置的上方;第一往复导丝装置包括第一往复机构和第一导丝机构,第一导丝机构用于引导纤维穿过第一往复导丝装置,第一往复机构用于带动第一导丝机构往复运动,第一导丝机构通过第一滑块连接件固定连接在第一往复机构上;第二往复导丝装置包括第二往复机构和第二导丝机构,第二导丝机构用于引导纤维穿过第二往复导丝装置,第二往复机构用于带动第二导丝机构往复运动,第二导丝机构通过第二滑块连接件固定连接在第二往复机构上;纤维通过引丝轮引入,依次经过第一导丝机构、第二导丝机构,并卷绕在卷绕机的纱锭上,第一往复导丝装置和第二往复导丝装置通过控制器进行控制并实现同步往复运动。
进一步的,第一往复机构包括第一滑台和第一滑块,第一滑台上固定连接有第一位移电机,第一位移电机的输出轴通过联轴器连接有第一滑杆,第一滑块连接在第一滑杆上,第一滑台上设有第一滑轨,第一滑块位于第一滑轨上。
进一步的,第一滑台靠近第一位移电机的一端设置有第一起始信号感应器,第一起始信号感应器与控制器连接。
进一步的,第一导丝机构包括第一连接架,第一连接架上连接有限位轮支架、定轮支架和张力轮支架,限位轮支架上连接有转向块,转向块通过固定轴连接有限位轮,定轮支架上连接有定轮,张力轮支架上连接有张力轮,第一连接架通过螺钉连接在第一滑块连接件上,第一滑块连接件通过螺钉连接在第一滑块上。
进一步的,张力轮支架上还连接有张力传感器,张力传感器与张力轮连接,张力传感器与控制器连接。
进一步的,第二往复机构包括第二滑台和第二滑块,第二滑台上固定连接有第二位移电机,第二位移电机的输出轴通过联轴器连接有第二滑杆,第二滑块连接在第二滑杆上,第二滑台上设有第二滑轨,第二滑块位于第二滑轨上。
进一步的,第二滑台靠近第二位移电机的一端设置有第二起始信号感应器,第二起始信号感应器与控制器连接。
进一步的,第二导丝机构包括第二连接架,第二连接架上连接有导轮支架,导轮支架上连接有导轮,第二连接架通过螺钉连接在第二滑块连接件上,第二滑块连接件通过螺钉连接在第二滑块上。
进一步的,引丝轮与限位轮之间的距离大于1.5米。
总的说来,本发明具有如下优点:
一、本发明的第一往复导丝装置和第二往复导丝装置通过控制器进行控制并实现同步往复运动,减小了往复导丝装置带动纤维往复摆动的角度,避免蹭丝和伤丝。
二、本发明的引丝轮与限位轮之间的距离大于1.5米,使得第一导丝机构带动纤维往复移动时,纤维摆动的角度α小于10°,极大地减少了纤维在限位轮上的位移,降低了纤维在限位轮上的横向摩擦,确保纤维在整个卷绕过程宽度始终能保持一致,保证纤维的品质。
附图说明
图1是本发明的结构示意图。
图2是本发明的第一往复导丝装置的结构示意图。
图3是本发明的主视图。
图4是本发明的俯视图。
图5是现有技术中的卷绕机的往复导丝装置的结构示意图。
其中:1为引丝轮,2为第一滑台,3为第一滑块,4为第一位移电机,5为第一滑杆,6为第一滑轨,7为第一起始信号感应器,8为第一连接架,9为限位轮支架,10为定轮支架,11为张力轮支架,12为转向块,13为固定轴,14为限位轮,15为定轮,16为张力轮,17为第一滑块连接件,18为张力传感器,19为第二滑台,20为第二滑块,21为第二位移电机,22为第二滑杆,23为第二滑轨,24为第二起始信号感应器,25为第二连接架,26为导轮支架,27为导轮,28为第二滑块连接件,29为纤维,30为纱锭,31为控制器,32为进丝轮,33为丝束,34为传统往复导丝装置,34-1传统导丝器,35为锭轴,36为纱管。
具体实施方式
下面将结合附图和具体实施方式来对本发明做进一步详细的说明。
如图1、图3和图4所示,一种卷绕机双导丝装置,包括第一往复导丝装置和第二往复导丝装置,第一往复导丝装置与第二往复导丝装置平行设置,第一往复导丝装置位于第二往复导丝装置的上方;第一往复导丝装置包括第一往复机构和第一导丝机构,第一导丝机构用于引导纤维穿过第一往复导丝装置,第一往复机构用于带动第一导丝机构往复运动,第一导丝机构通过第一滑块连接件固定连接在第一往复机构上;第二往复导丝装置包括第二往复机构和第二导丝机构,第二导丝机构用于引导纤维穿过第二往复导丝装置,第二往复机构用于带动第二导丝机构往复运动,第二导丝机构通过第二滑块连接件固定连接在第二往复机构上;纤维通过引丝轮引入,依次经过第一导丝机构、第二导丝机构,并卷绕在卷绕机的纱锭上,第一往复导丝装置和第二往复导丝装置通过控制器进行控制并实现同步往复运动。
如图1所示,第一往复机构包括第一滑台和第一滑块,第一滑台上固定连接有第一位移电机,第一位移电机的输出轴通过联轴器连接有第一滑杆,第一滑块连接在第一滑杆上,第一滑台上设有第一滑轨,第一滑块位于第一滑轨上。第一位移电机驱动第一滑杆转动,第一滑杆转动带动第一滑块在第一滑轨上移动,即带动第一滑块沿着第一滑台的长度方向移动。第一滑台靠近第一位移电机的一端设置有第一起始信号感应器,第一起始信号感应器与控制器连接。第一起始信号感应器处为第一滑块运动的起始点,第一起始信号感应器能产生电子信号或光学电信号,在本实施方式中,第一起始信号感应器为第一起始接近开关,第一起始接近开关能产生感应信号,并将信号传到控制器上。
如图1和图2所示,第一导丝机构包括第一连接架,第一连接架上连接有限位轮支架、定轮支架和张力轮支架,限位轮支架上连接有转向块,转向块通过固定轴连接有限位轮,定轮支架上连接有定轮,张力轮支架上连接有张力轮。纤维通过引丝轮引入,并依次经过限位轮、定轮、张力轮,然后进入第二往复导丝装置中。在导丝的过程中,可以根据纤维的宽度,调整转向块的方向,进而调整限位轮的方向,来控制纤维横向偏移;通过设置定轮,能够对纤维的运行路径进行限定。张力轮支架上还连接有张力传感器,张力传感器与张力轮连接,张力传感器与控制器连接。通过设置张力轮和张力传感器,能够对纤维的延伸率进行检测。第一连接架通过螺钉连接在第一滑块连接件上,第一滑块连接件通过螺钉连接在第一滑块上,实现了第一往复机构和第一导丝机构的连接固定。
如图1所示,第二往复机构包括第二滑台和第二滑块,第二滑台上固定连接有第二位移电机,第二位移电机的输出轴通过联轴器连接有第二滑杆,第二滑块连接在第二滑杆上,第二滑台上设有第二滑轨,第二滑块位于第二滑轨上。第二位移电机驱动第二滑杆转动,第二滑杆转动带动第二滑块在第二滑轨上移动,即带动第二滑块沿着第二滑台的长度方向移动。第二滑台靠近第二位移电机的一端设置有第二起始信号感应器,第二起始信号感应器与控制器连接。第二起始信号感应器处为第二滑块运动的起始点,第二起始信号感应器能产生电子信号或光学电信号,在本实施方式中,第二起始信号感应器为第二起始接近开关,第二起始接近开关能产生感应信号,并将信号传到控制器上。
如图1所示,第二导丝机构包括第二连接架,第二连接架上连接有导轮支架,导轮支架上连接有导轮。从第一往复导丝装置引出的纤维经过导轮,并卷绕在卷绕机的纱锭上。在本实施方式中,导轮支架上连接有三个导轮。通过设置导轮,可以引导纤维卷绕在纱锭上。第二连接架通过螺钉连接在第二滑块连接件上,第二滑块连接件通过螺钉连接在第二滑块上,实现了第二往复机构和第二导丝机构的连接固定。
如图4所示,第一往复导丝装置和第二往复导丝装置通过控制器进行控制并实现同步往复运动。即在卷绕开始前,第一滑块位于第一起始接近开关位置处,第二滑块位于第二起始接近开关位置处,开始时,第一位移电机转动,第一滑块位于第一起始接近开关位置处,第一起始接近开关将该信号传输给控制器,控制器收到信号后发送指令信号给第二位移电机,控制第二位移电机转动来匹配第一位移电机转速,使得第一滑块和第二滑块能沿着同样的方向同步移动。当需要停止时,直接通过控制器中的停止键控制,第一位移电机和第二位移电机同时停止。
如图3所示,第一往复导丝装置与第二往复导丝装置平行设置,第一往复导丝装置位于第二往复导丝装置的上方;在本实施方式中,第一往复导丝装置通过螺钉固定在第二往复导丝装置的上方,第一往复导丝装置与第二往复导丝装置的高度差,根据不同卷绕机不同高度设计,同时要保证纤维从张力轮到导轮之间不会与任何机械结构干涉,避免伤丝。
如图4所示,引丝轮与限位轮之间的距离大于1.5米。当引丝轮与限位轮之间的距离大于1.5米时,才能够使得第一导丝机构带动纤维往复移动时,纤维摆动的角度α小于10°,α小于10°,极大地减少了纤维在限位轮上的位移,降低了纤维在限位轮上的横向摩擦,确保纤维宽度从引丝轮到定轮上的丝宽几乎不变。此外,α小于10°,纤维在往复中张力变化更小,张力传感器感应张力变化灵敏,时刻微调纤维张力,使得纤维在进入纱锭过程中每一段的张力一致,纱锭成型更优。纤维经过第一往复导丝装置的限位轮、定轮、张力轮的宽度不变,再经过第二往复导丝装置的导轮,由于第一往复导丝装置与第二往复导丝装置是平行且同步速度移动,可以保证纤维在整个生产过程中从引入到卷绕到纱锭过程中宽度始终一致,更有利于后段使用。
总的说来,本发明的第一往复导丝装置和第二往复导丝装置通过控制器进行控制并实现同步往复运动,减小了往复导丝装置带动纤维往复摆动的角度,避免蹭丝和伤丝。本发明的引丝轮与限位轮之间的距离大于1.5米,使得第一导丝机构带动纤维往复移动时,纤维摆动的角度α小于10°,极大地减少了纤维在限位轮上的位移,降低了纤维在限位轮上的横向摩擦,确保纤维在整个卷绕过程宽度始终能保持一致,保证纤维的品质。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种卷绕机双导丝装置
- 一种一步法冷热定形假捻机的双罗拉导丝卷绕装置