一种多足机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及一种多足机器人,属于养殖设备技术领域。
背景技术
养蚕需要大量的桑叶,因此需要大量的桑树。自然生长的桑树一般为乔木型,采叶不便。在蚕桑的生产上,都是需要人工剪枝定形。同时,桑树的枝条的高度根据桑树的年龄而有所差异,从几十厘米到一米五左右均有。而桑树的枝条较密,修剪设备和采叶设备很难在不损伤枝条的情况下通过。现有的技术中,在使用机械进行修剪和采叶时,均采用低高度的设备,以便在枝条下方通行,但是这样就需要操作人员不停的弯腰进行作业,大幅增加了劳动强度。
发明内容
本发明要解决技术问题是:克服上述技术的缺点,提供一种能够自适应高度的多足机器人。
为了解决上述技术问题,本发明提出的技术方案是:一种多足机器人,包括:至少两个相连的车体;所述车体的首端具有球头,尾端具有球座;前一个所述车体的球座能够与后一个所述车体的球座组成球铰;从而将两个所述车体相连;所述车体两侧均至少设置两个支腿;所述支腿的一端与所述车体铰接,另一端装有行走足;所述行走足包括三叉臂和铰接在所述三叉臂端部的爪,所述爪的底端具有齿;所述三叉臂的中心与所述支腿的另一端铰接;所述车体内具有第一电机和第二电机,以及为所述第一电机和第二电机供电的电池;所述第一电机的输出通过第一减速机驱动所述支腿转动;所述第二电机的输出通过第二减速机驱动所述三叉臂转动。
上述方案进一步的改进在于:所述第一电机的输出连接所述第一减速机;所述第一减速机连接第一驱动轴;所述第一驱动轴带动所述支腿转动。
上述方案进一步的改进在于:所述第二电机的输出连接所述第二减速机;所述第二减速机连接第二驱动轴;所述第二驱动轴通过链轮连接套设在所述支腿上的链条;所述链条带动所述三叉臂转动。
上述方案进一步的改进在于:所述第二驱动轴为空心轴,所述第一驱动轴自所述第二驱动轴中穿过。
上述方案进一步的改进在于:所述车体一侧的所述支腿朝向车体的首端倾斜,另一侧的所述支腿朝向所述车体的尾端倾斜。
上述方案进一步的改进在于:所述车体顶部能够搭载设备。
上述方案进一步的改进在于:所述球头与球座均通过延长杆布置在所述车体上,所述球座与连接所述球座的延长杆具有开槽。
上述方案进一步的改进在于:所述三叉臂的端部具有限位块,能够限制所述爪在所述三叉臂转动时的摆动范围。
本发明提供的多足机器人,通过支腿的倾斜角度来改变车体的高度,并能够任意调整任意支腿角度,来适应倾斜的地面;同时,采用行走足的设计来适应地面的状态。
附图说明
下面结合附图对本发明作进一步说明。
图1是本发明一个优选的实施例结构示意图。
图2是图1俯视结构示意图。
图3是图1升高状态结构示意图。
具体实施方式
实施例
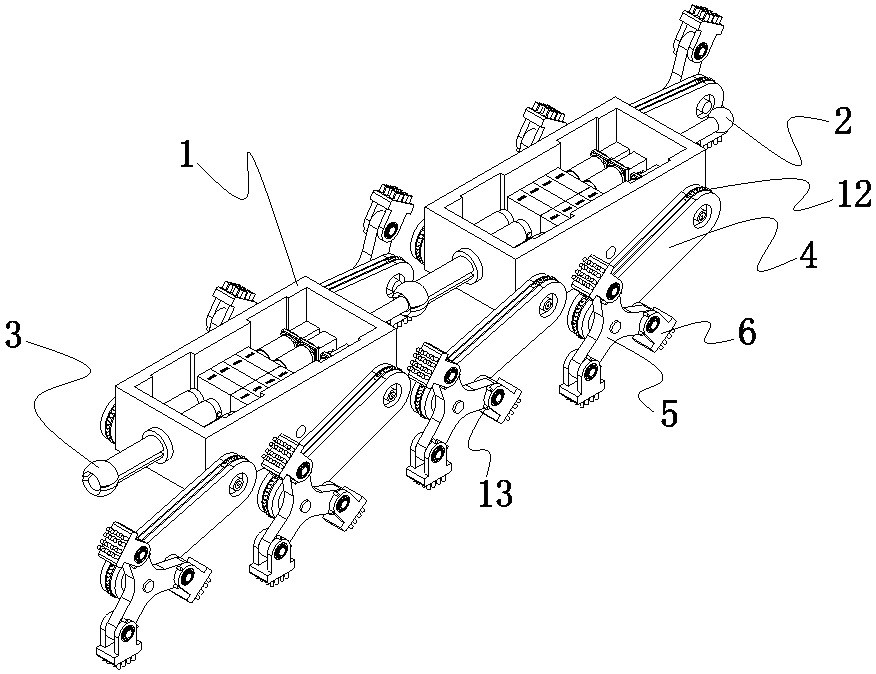
本实施例的多足机器人,如图1和图2所示,包括:两个相连的车体1;车体1的首端具有球头2,尾端具有球座3;前一个车体的球座能够与后一个车体的球座组成球铰;从而将两个车体相连。
车体1两侧均设置两个支腿4;支腿4的一端与车体1铰接,另一端4装有行走足;行走足包括三叉臂5和铰接在三叉臂端部的爪6,爪6的底端具有齿。三叉臂5的中心与支腿4的另一端铰接;车体1内具有第一电机7和第二电机8,以及为第一电机7和第二电机8供电的电池9。第二电机8的输出连接第二减速机11,再通过第二驱动轴输出至支腿4与车体1的铰接点处,再通过链轮带动套设在支腿4上的链条12驱动三叉臂5转动。第一电机7的输出连接第一减速机10,再通过第一驱动轴输出并驱动支腿4转动。其中第二驱动轴为空心轴,以便容纳第一驱动轴从其中穿过。
车体1一侧的支腿朝向车体的首端倾斜,另一侧的支腿朝向车体的尾端倾斜。
车体1顶部能够搭载设备,本实施例中,为了便于显示其内部结构,未展示车体的顶盖。。
为了适应支腿4的长度,球头2与球座3均通过延长杆布置在车体1上,为了便于拆装,球座3与连接球座的延长杆具有开槽。
为了防止爪6的在三叉臂转动时卡住,不能正常翻转,在触地时底端不能朝向地面,三叉臂5的端部具有两个限位块13,能够限制爪在三叉臂转动时的摆动范围。
本实施例由于两侧支腿的朝向不同,而一个车体均有4个支腿;因此两车体、八支腿为保持平衡的最低配置,根据现场需求,可以采用更多车体的配置。在工作过程中,行走由第二电机驱动三叉臂转动实现,爪的重心能够保持爪在三叉臂的低位时自动朝向底面,而其上的齿能够适应不同的地面情况,获取足够的抓地力,相对于采用轮胎的方案来说,能够更好的适应例如泥泞等状态的地面。每个三叉臂独立驱动转动,从而获得更高的灵活性。
本实施例的支腿提供支撑,由第一电机驱动调整其倾斜角度,第一减速机则提供相应的阻力,避免支腿在受迫时改变角度。通过第二电机驱动支腿改变倾斜角度,根据现场高度,可以灵活调整车体的高度,如图3所示,即为升高后的状体。每个支腿都独立驱动,进而根据现场情况,进行独立调整,让整体获得倾斜得可能性,从而适应倾斜的坡地等地面情况。
本实施例中的,首、尾的仅仅是表达对应关系,而非实际工作状态的首尾。
本发明不局限于上述实施例。凡采用等同替换形成的技术方案,例如单车体,六支腿等方案,均落在本发明要求的保护范围。
- 一种足式机器人足端结构、腿部运动机构及四足机器人
- 多足轮式机器人的长行程伸缩轮式足及多足轮式机器人