一种车辆抵押库存盘点机器人
文献发布时间:2023-06-19 11:11:32
技术领域
本发明属于机器人技术领域,尤其涉及一种车辆抵押库存盘点机器人。
背景技术
汽车4S店为了有足够的资金购买新车,往往需要从银行办理贷款业务。因此产生了车辆合格证的质押贷款业务,是各家银行拓展汽车信贷一种创新性金融产品。由于各银行的金融政策不同,4S店为了获得足够贷款往往需要抵押新车合格证给多家银行,而每家银行为了保证贷款的良性,需要定期盘点4S店所抵押车辆是否售出,如果已经售出则要求4S店归还贷款及利息。部分4S店出于资金周转需要,往往不及时归还贷款,因此增加了银行的抵押车辆盘点工作量。并且所有抵押车辆共同混放于4S店车库当中,每个银行派专人盘点时,需要把所有车辆车架号进行手工记录和比对,最后核实出是否有抵押车辆售出,工作量非常巨大,效率极低。
发明内容
本发明要解决的技术问题是,提供一种车辆抵押库存盘点机器人,具有可以能够代替人工盘点车辆,减少工作量,提高效率的效果。
为实现上述目的,本发明采用如下的技术方案:
一种车辆抵押库存盘点机器人,包括:机器人主体和移动底盘;所述移动底盘包括:无线通信模块、主控板、两个轮毂电机驱动轮;所述机器人本体上设有第一摄像装置、第二摄像装置、多个雷达测距传感器、陀螺仪、机械臂以及清洁装置,第一摄像装置、第二摄像装置、雷达测距传感器、陀螺仪、机械臂、无线通信模块、轮毂电机驱动轮分别连接主控板;其中,所述移动底盘设置在所述机器人本体下方,用于在所述主控板的驱动下带动所述机器人本体移动。
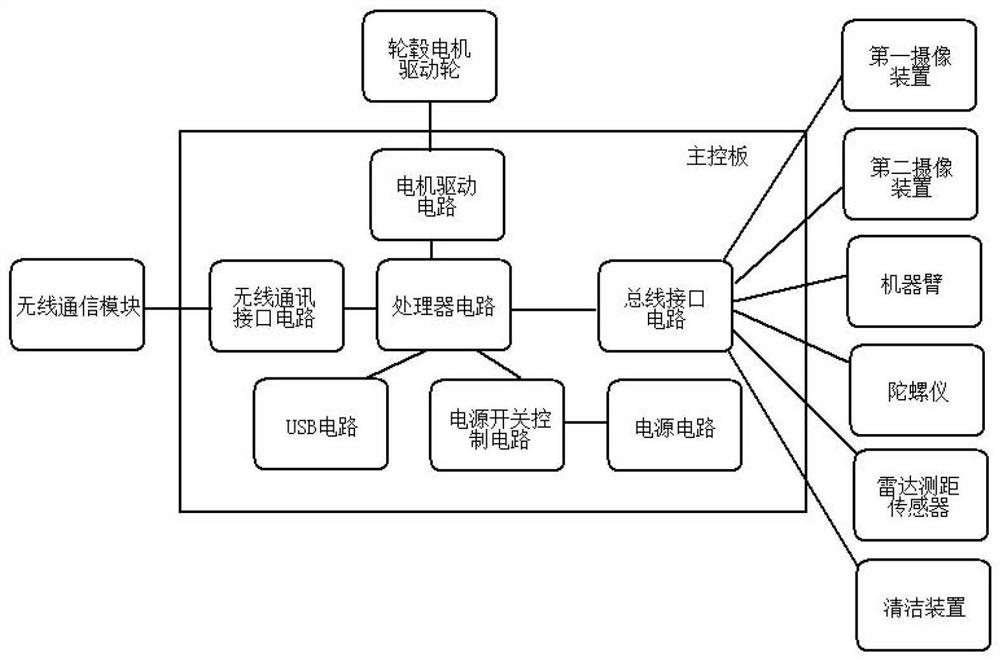
进一步,所述主控板包括:处理器电路、总线接口电路、电机驱动电路、无线通讯接口电路、电源开关控制电路、USB电路,所述总线接口电路、电机驱动电路、无线通讯接口电路、电源开关控制电路、USB电路分别连接处理器电路,所述电机驱动电路连接轮毂电机驱动轮,所述总线接口电路连接第一摄像装置、第二摄像装置、雷达测距传感器、陀螺仪、机械臂,所述无线通讯接口电路连接无线通信装置。
进一步,所述无线通信装置连接后台服务器
进一步,所述主控板还包括:用于与所述电源开关控制电路连接的电源电路。
进一步,所述无线通信装置为4G模块或5G模块。
进一步,所述清洁装置为电动毛刷。
本发明中,机器人设置为定期盘点或者接受各个银行的远程盘点操作指令。开始盘点后,主控板根据第一摄像装置构建库房场地粗略汽车摆放地图,通过第二摄像装置从场地最边缘侧开始逐个识别车辆车架号,形成以时间命名的盘点文件列表,主控板通过无线通信装置接入以太网将盘点文件列表发送至云端汽车管理平台,相关业务银行通过权限访问云端管理平台进行查看,采用本发明的技术方案,可以能够代替人工盘点车辆,达到减少工作量,提高效率的效果。
附图说明
后文将参照附图以示例性而非限制性的方式详细描述本申请的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附
图中:
图1为本发明车辆抵押库存盘点机器人的结构示意图;
图2为本发明车辆抵押库存盘点机器人工作原理的流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,以下结合附图对本发明进行具体阐述。
如图1所示,本发明提供一种车辆抵押库存盘点机器人包括:机器人主体和移动底盘;所述移动底盘包括:无线通信模块、主控板、两个轮毂电机驱动轮;所述机器人本体上设有第一摄像装置、第二摄像装置、多个雷达测距传感器、陀螺仪、机械臂以及清洁装置,第一摄像装置、第二摄像装置、雷达测距传感器、陀螺仪、机械臂、无线通信模块、轮毂电机驱动轮分别连接主控板,所述机械臂连接清洁装置,所述清洁装置为电动毛刷;其中,所述移动底盘设置在所述机器人本体下方,用于在所述主控板的驱动下带动所述机器人本体移动。所述无线通信装置连接后台服务器;所述无线通信装置为4G模块或5G模块。
进一步,所述主控板包括:处理器电路、总线接口电路、电机驱动电路、无线通讯接口电路、电源开关控制电路、USB电路、电源电路,所述总线接口电路、电机驱动电路、无线通讯接口电路、电源开关控制电路、USB电路分别连接处理器电路,所述电机驱动电路连接轮毂电机驱动轮,所述总线接口电路连接第一摄像装置、第二摄像装置、雷达测距传感器、陀螺仪、机械臂,所述无线通讯接口电路连接无线通信装置,所述电源开关控制电路连接电源电路。
进一步,所述电源电路用于给主控板供电,电源控制开关电路用于控制主控板上电。所述电源电路包括依次连接的短路保护电路、防反接电路和电源接口电路,其中,所述短路保护电路与所述电源控制开关电路连接。所述短路保护电路用于对主控板进行电路保护,优选地,能够将主控板的电路电流限制在3A以下,防止因短路导致外部电源电流过大而发生危险。所述防反接电路使用金属-氧化物半导体场效应晶体管(MOS管)防反接,该电路功耗小并且能够延长电源使用时间。防反接电路用于当电源接口电路的电源端和地端反接时,会自动断开电路连接,以防止后级电路的损坏。所述电源接口电路用于给主控板供电。
进一步,所述USB电路包括依次连接的USB转UART电路、USB口防护电路和USB接口电路,其中,所述USB转UART电路和所述处理器电路连接。所述USB口防护电路采用瞬态抑制二极管(TVS,Transient Voltage Suppressor)防护。该电路对静电泄放反应快,能够防止人体静电引起的接口部分电路损坏,同时限制了主控板从USB接口电路取电的电流,有效防止供电的USB设备的损坏。所述USB转UART电路,用于实现USB到UART接口协议的转换。所述USB接口电路,用于对所述处理器电路进行预存固件烧写。
所述雷达测距传感器,用于机器人行进中避障、以及使机器人底盘与左右车辆保持合适距离。主控板根据通过第一摄像装置获取的场地全景图片构建库房场地粗略汽车摆放地图进而识别车辆具体位置,通过雷达测距传感器判断车辆前轮位置,通过陀螺仪使机器人到位后,控制机器人机械臂伸展,通过车第二摄像装置从车辆前挡风玻璃拍摄车架号,然后通过主控板进行识别车架号,转为相应字母和数字顺序存入本次盘点文件表格,形成以时间命名的盘点文件列表,主控板通过无线通信装置接入以太网将盘点文件列表发送至云端汽车管理平台,相关业务银行通过权限访问云端管理平台进行查看。优选地,车架号拍摄时通过超声波传感器定位第二摄像装置到车架号距离,最佳拍摄距离为30CM。由于大部分4S店车辆存放为开放场地,车辆长时间放置后会出现灰尘覆盖车架号,第二摄像装置拍摄后主控板无法识别出车架号,此时机械臂控制电动毛刷靠近车架号前挡风玻璃,通过超声波定位25CM位置机器人控制电动毛刷旋转清洁该部分前挡玻璃,清洁后再实施车架号拍摄识别。
如图2所示,本发明的辆抵押库存盘点机器人工作流程为:
步骤1、机器人平时处于在线充电待机状态。
步骤2、待机状态下,主控板判断是否收到盘点指令或者周期性定时盘点时间到时;如果两者满足其一则机器人进入盘点程序,否则继续在线待机。
步骤3、进入盘点程序后,主控板控制机械臂抬高,通过第一摄像头拍摄场地全景图片,识别出道路和车辆,构建场地布置栅格地图,道路为白色,车辆等为黑色。
步骤4、主控板根据构建地图,结合机器人当前位置规划出一条全部车辆盘点路径。
步骤5、根据规划路径,主控板结合地图、雷达测距传感器以及陀螺仪,使机器人到达盘点汽车位置。
步骤6、机器人通过调节机械臂的高度和位置,控制第二摄像头快速到达扫描位置,拍摄车窗玻璃下车架号图片,调用预存图片识别程序;该图片识别程序判断图片中车架号和背景差值是否达标,若达标,则进行识别并保存车架号;若不达标,则调用预存的车架前档玻璃清洗程序,清洗程序控制机械臂末端毛刷旋转清洁车架号前档部玻璃;清理后再次进入车架号拍摄识别程序。
步骤7、将识别出的车架号代码存入本次盘点Excel表格中。
步骤8、判断是否规划路径全部盘点完成,若未完成,则重复步骤5至步骤7;若完成,则机器人保存全部盘点结果并通过无线通信装置接入以太网将盘点文件列表发送至云端汽车管理平台,相关业务银行通过权限访问云端管理平台进行查看。
步骤9、完成盘点后机器人自动返回充电初始位置,继续在线充电待机。
显然,本领域的技术人员可以对本发明进行各种改动和变形而不脱离本发明的精神和范围。应注意到的是,以上所述仅为本发明的具体实施例,并不限制本发明,凡在本发明的精神和原则之内,所做的调制和优化,皆应属本发明权利要求的涵盖范围。
- 一种车辆抵押库存盘点机器人
- 一种基于机器人的药店商品库存盘点方法