自身压力为动力的上行助推器
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及上行助推器技术领域,具体涉及一种自身压力为动力的上行助推器。
背景技术
目前,在山区生活的群众,在劳动、出行等过程中都需要负重上行,体力消耗非常大。另外,随着人口老龄化时代到来,居住楼房的老人数量逐渐增多,而城市中仍然存在大量未安装电梯的楼房。对于这部分住房,老人上楼比较困难。由此,研制一种上行助力装置是非常必要的。但是,除了市场中有一种直线推进器(直线电机)以外,其他外骨骼类上推助力产品,都需要蓄电池等外动力,还要有传感器或电脑操控,这样就造成了结构复杂,重量增加、价格昂贵,上行助推工作全部依赖外动力,这是一个明显的缺陷。
发明内容
本发明总结和分析了现有上行助推器的经验和教训,另辟蹊径,研发一种依靠自身压力为推力的上行助推器,其特点是利用特殊的机械传导结构,将使用者的上行压力转变为上行推力,形成一种特殊而有效的助推力学构型。其结构简单,无需外动力,易于操作,方便携带,而且价格低廉。
为达到上述目的,本发明提供的技术方案是,设计为自身压力为动力的上行助推器,其包括腰部固定件及一个或两个驱动组件;所述驱动组件包括踏板、弹性元件、底板、第一齿轮、第二齿轮、第一齿条、第二齿条、动力臂、第一立杆、第二立杆、第一传导臂、第二传导臂及固定件;底板上部通过弹性元件连接至踏板,踏板铰接第一立杆一端,第一立杆另一端铰接第二立杆一端,第二立杆另一端铰接腰部固定件,踏板转动连接第一齿轮,底板固定连接第一齿条,第一齿条滑动连接至踏板,第一齿条啮合第一齿轮,第一齿轮与第二齿轮同轴设置,并且同步转动,第二齿轮啮合第二齿条,第二齿条固定连接动力臂底端,动力臂上端端铰接第二传导臂底端,第二传导臂上端铰接固定件一端,所述固定件另一端垂直固定在所述第二立杆上,所述第一传导臂一端铰接于第二传导臂与动力臂连接位置,第一传导臂另一端同轴铰接于第一立杆与第二立杆连接位置。
基于上述技术方案,腰部固定件可以是固定腰带或其他形式进行腰部固定,当使用者站在踏板上,驱动组件位于使用者腿外侧,第一立杆、第二立杆与腿部外骨骼尺寸相匹配,形成类似腿部骨骼的结构,两者的连接位置能与人体的膝关节同步联动,弯曲或者抬升。脚部双层鞋套踏板、弹性元件、底板相配合的结构,向下踩踏板,弹性元件可以为向下的踩踏动作预留下推空间,踏板向下推压运动,其上转动连接的第一齿轮在第一齿条的作用下转动,同时带动第二齿轮同步转动,但第二齿轮与第一齿轮尺寸比例是1:3,第二齿轮与第二齿条啮合,第二齿条向上运动的长度就增加三倍,上推长度达到16公分左右,可以满足上推的长度需求,第二齿条带动与其连接的动力臂向上运动,动力臂推动传导臂向上翘起,向上传导至第二传导臂,通过固定在第二立杆上的固定件对大腿进行推力施加,支起腿部,使抬腿变得轻松。脚每向下踩踏一次,动力臂就向上推动一次,根据作用力等于反作用力的原理,使用者每次下踏其压力一般都不会低于60公斤,这样,扣除压力的耗散(按照耗散30%计算)人体每次上行踏步,向上的推力不会低于40公斤。可以满足上推的需要。
优选的,所述驱动组件设置两个,分别安装于腰部固定件两侧。
基于上述技术方案,使用者两条腿的外侧均设置立杆组件,两条腿接替动作,促使使用者稳定上行。当使用者一只脚向下踩踏台阶,此时这只脚外侧的动力臂作用,支起腿部。另一只脚抬起迈向台阶,压力消失,推力结束,在顶端弹性元件的作用下,动力臂、第一传导臂、第二传导臂还原,如此交替往复。
进一步的,所述腰部固定件包括腰部固定板,腰部固定板两侧连接横梁,横梁垂直固定第三立杆,所述第二立杆另一端铰接第三立杆。
基于上述技术方案,第二立杆与第三立杆形成转折,该位置模拟大腿根部的骨骼。
进一步的,所述第一齿轮、第二齿轮的齿轮比为1:2-1:4。
优选的,第一齿轮、第二齿轮的齿轮比为1:3。
进一步的,所述第一立杆上靠近第二立杆的位置安装腿部固定件。
基于上述技术方案,可以采用腿部固定绑带或其他方式进行腿部的固定,更便于该位置的立杆与使用者腿部进行联动。
进一步的,所述腿部固定件为弧形杆。
基于上述技术方案,设置弧形杆可以更好的配合人体腿部的结构,实用更加舒适。
进一步的,所述踏板两侧分别安装内侧板及外侧板,其中外侧板上轴连接第一齿轮,内侧板铰接第五立杆一端,第五立杆另一端与腿部固定件固定。
基于上述技术方案,在腿部的内侧也设置有立杆,这样设置的方式,形成双柱支撑,更有利于使用者踩踏动作的稳定性。
进一步的,所述外侧板上设置滑槽,第一齿条背侧设有与滑槽配合的滑动部。
基于上述技术方案,当使用者向下踩踏板的过程中,第一齿轮同步向下运动,第一齿轮与第一齿条产生了相对位移,此过程中,第一齿条背部的滑动部限位在外侧板上设置的滑槽内部滑动。
进一步的,所述第二齿轮外侧设置外限位板,安装第一齿轮的侧板上安装内限位板,外限位板通过连接轴与内限位板连接,所述第二齿条限位在外限位板、内限位板与连接轴之间与第二齿轮啮合。
进一步的,所述弹性元件为弹簧组,踏板前端与底板转动连接,后端通过弹簧组连接。
基于上述技术方案,弹簧组不仅可以为向下踩踏动作留有足够下行空间,还可以在完成踩踏动作之后进行复位。
或者采用踏板前端与底板设置为一个整体,采用可形变的、轻质、软性材料做成鞋套状,即整体为一个V字型结构,后端上翘四公分,通过弹簧组连接。
进一步的,所述踏板后端转动连接上下转动块状体。
基于上述技术方案,为了解决平地行走和上山上楼的功能转换,在v形鞋底(一体设置的踏板与底板)的脚跟部上下层(踏板与底板)之间,设置一个以折页类装置相固定的上下转动块状体,当需要走平地时,将块状体转动到v形鞋底(踏板与底板)之间,作为v形底板上下层的支撑,保证走平道时第一齿条不下推。
对本发明的进一步说明,对于不同身材的使用者,可以将设置第一立杆、第二立杆、第三立杆、第四立杆设置为可伸缩结构,进行调节,同时适应性改变动力臂、第一传导臂、第二传导臂的长度。或者在动力臂上设置五组尺寸调节孔,每组调节孔间隔为一厘米。
需要说明的是,其中的可伸缩结构,采用现有技术中本领域技术人员使用的常规结构实现伸缩即可,比如利用多个螺栓孔,配合锁紧螺栓的形式。
本发明的有益效果,通过脚部的齿轮、齿条传动及杠杆传导结构,使人体自身的重量转化为上行推力,无需依赖外力,成本降低,工作更加可靠。
附图说明
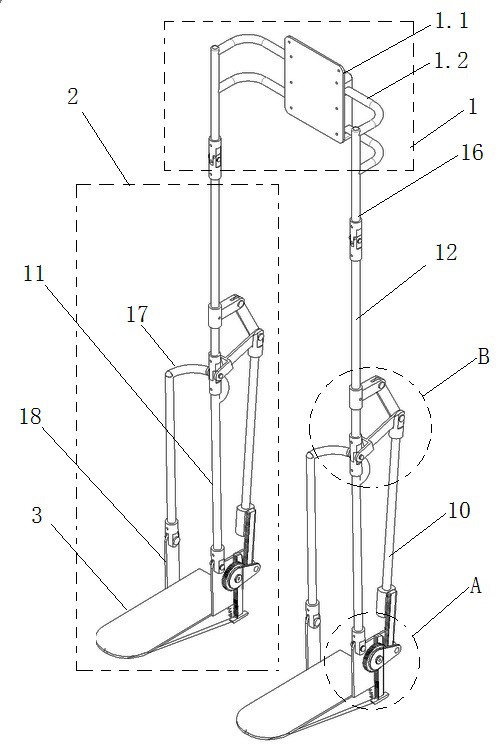
图1为本发明的结构示意图;
图2为图1中A部分的局部放大图;
图3为图1中B部分的局部放大图;
图4为本发明的侧面示意图;
图5为本发明一侧腿抬起时的侧面示意图;
图6为图5中C部分的局部放大图;
图7为第一齿轮位置的仰视局部示意图;
图8为第一齿轮位置(外侧板隐藏)的结构示意图;
图9为驱动组件设置一组的结构示意图;
图10为上下转动块状体部位的结构示意图;
图中:1、腰部固定件,1.1、腰部固定板,1.2、横梁,2、驱动组件,3、踏板,4、弹性元件,5、底板,6、第一齿轮,7、第二齿轮,8、第一齿条,9、第二齿条,10、动力臂,11、第一立杆,12、第二立杆,13、第二传导臂,14、第一传导臂,15、固定件,16、第三立杆,17、腿部固定件,18、内侧板,19、外侧板,20、滑槽,21、外限位板,22、内限位板,23、连接轴,24、上下转动块状体。
具体实施方式
下面结合说明书附图,对本发明结构进行进一步说明。
如图1-图8所示,一种自身压力为动力的上行助推器,其包括腰部固定件1及两个驱动组件2;所述驱动组件包括踏板3、弹性元件4、底板5、第一齿轮6、第二齿轮7、第一齿条8、第二齿条9、动力臂10、第一立杆11、第二立杆12、第二传导臂13、第一传导臂14及固定件15;底板5上部通过弹性元件4连接至踏板3,需要说明的是,底板5、踏板3及弹性元件4形成了双层鞋套结构,其中,底板5、踏板3形成v形弹性鞋底,其上部与下部的距离为4公分左右。上下部之间,设置两组弹力能支撑10公斤以上压力的弹簧。踏板3铰接第一立杆11底端,第一立杆11上端铰接第二立杆12底端,第二立杆12上端铰接腰部固定件1,踏板3转动连接第一齿轮6,底板5固定连接第一齿条8,第一齿条8滑动连接至踏板3,第一齿条8啮合第一齿轮6,第一齿轮6与第二齿轮7同步转动,第二齿轮7啮合第二齿条9,第二齿条9固定连接动力臂10一端,动力臂10另一端铰接第二传导臂13一端,第二传导臂13另一端铰接固定件15一端,所述固定件15另一端垂直固定在所述第二立杆12上,所述第一传导臂14一端铰接于第二传导臂13与动力臂10连接位置,第一传导臂14另一端同轴铰接于第一立杆11与第二立杆12连接位置。
优选的,所述驱动组件2设置两个,分别安装于腰部固定件1两侧。
进一步的,所述腰部固定件1包括腰部固定板1.1,腰部固定板1.1两侧连接横梁1.2,横梁1.2垂直固定第三立杆16,所述第二立杆12另一端铰接第三立杆16。
进一步的,所述第一齿轮、第二齿轮的齿轮比为1:3。
进一步的,所述第一立杆11上靠近第二立杆12的位置安装腿部固定件17。
进一步的,所述腿部固定件17为弧形杆。
进一步的,所述踏板3两侧分别安装内侧板18及外侧板19,其中外侧板19上轴连接第一齿轮6,内侧板18铰接第五立杆19一端,第五立杆19另一端与腿部固定件17固定。
进一步的,所述外侧板19上设置滑槽20,第一齿条8背侧设有与滑槽配合的滑动部,如图所示,本实施例中的滑动部为条状的键结构。
进一步的,所述第二齿轮7外侧设置外限位板21,安装第一齿轮6的侧板上安装内限位板22,外限位板21通过连接轴23与内限位板22连接,所述第二齿条9限位在外限位板、内限位板22与连接轴23之间与第二齿轮7啮合。
进一步的,所述弹性元件4为弹簧组,踏板3前端与底板5设置为一个整体的可形变v形弹性鞋底,后端通过弹簧组连接,其中弹簧组中弹簧的个数及强度可根据需要进行设置。
需要说明的是,本发明中驱动组件2可以进设置一个,如图9所示,其可以适用于部分仅需要一侧腿部复健或其他残障人士。
进一步的,如图10所示,所述踏板后端转动连接上下转动块状体24。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 自身压力为动力的上行助推器
- 穿戴式自重力为动力的上行助推器