一种柔性塑管自动往复喷漆机
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及喷涂装置领域,特别是涉及一种柔性塑管自动往复喷漆机。
背景技术
柔性塑管为细长工件,长度1.6米~2米不等,直径一般不超过20mm,材质为硅胶,柔软且自身不能直立,工件自身的特点导致其外表面喷涂作业尤为困难,只能借助穿引杆辅助使其直立伸展,然后再辅助放置在安装框架上人工单根上下挥动手工喷枪喷涂作业,单根上下喷涂时每根柔性塑管需要分别从六个方向喷涂作业,而柔性塑管属大批量工件,日产量需要至少要达到3000~4000根,作业人员的劳动强度非常大且喷涂作业的表面质量非常不问题,经常出现批量性报废情况,人工成本占比达到了喷涂作业总成本的50%以上;柔性塑管喷涂的涂料为油墨类涂料,油墨涂料成本占比达到了喷涂作业总成本的40%,而人工作业不稳定,油墨涂料的浪费较大,也提高了喷涂工序的成本。由于人工喷涂作业过程复杂,严重制约了柔性塑管的班产量,柔性塑管作为行业通用零件,更限制了上游行业的产量和发展,导致柔性塑管喷涂作业产量直接决定了上游行业产品的产量。
发明内容
(一)要解决的技术问题
本发明所要解决的问题是提供一种柔性塑管自动往复喷漆机,以克服现有柔性塑管喷涂效率低、人工强度大以及喷涂成本高的缺陷。
(二)技术方案
为解决所述技术问题,本发明提供一种柔性塑管自动往复喷漆机,包括喷漆机台架和可相对所述喷漆机台架在竖直方向上滑动的喷枪枪杆,所述喷枪枪杆上沿直线方向等间距设置有多个自动往复喷枪;所述喷漆机台架上可拆卸安装有安装框架,所述安装框架上沿直线方向等间距设置有多个可转动的穿引杆,所述自动往复喷枪与所述穿引杆对应设置,所述穿引杆上穿设有待喷漆的柔性塑管;喷涂时,所述穿引杆带动所述柔性塑管转动,同时所述喷枪枪杆带动所述自动往复喷枪滑动对所述柔性塑管进行喷涂。本柔性塑管自动往复喷漆机,大大降低了操作人员的劳动强度且不需要专业的喷涂作业人员参与,减少了喷涂作业过程油墨涂料的浪费,显著降低人工成本和原材料成本的同时提高了作业效率,提高了自动化程度,从根本上解决了困扰行业发展的难题。
进一步的,所述喷漆机台架上安装有用于驱动所述穿引杆转动的回转驱动机构;所述回转驱动机构包括多个沿直线方向等间距设置在所述喷漆机台架上的穿引杆驱动轴,所述穿引杆驱动轴与所述穿引杆对应设置,所述穿引杆的下端与所述穿引杆驱动轴相连接;所述喷漆机台架上设置有多个便于所述穿引杆驱动轴转动的轴承座。所述回转驱动机构还包括转动安装在所述喷漆机台架下侧的回转驱动轴,所述回转驱动轴上沿直线方向等间距设置有多个第一伞齿轮,所述穿引杆驱动轴的下端设置有第二伞齿轮,所述第二伞齿轮与所述第一伞齿轮相啮合。
进一步的,所述喷漆机台架上安装有用于驱动所述喷枪枪杆滑动的滑移驱动机构;所述滑移驱动机构包括设置在所述喷漆机台架两侧的第一同步带和第二同步带,所述喷枪枪杆的两侧分别通过固定支座安装在所述第一同步带和所述第二同步带之间。所述滑移驱动机构还包括转动安装在所述喷漆机台架上下两端的第一传动轴和第二传动轴,所述第一传动轴的两侧分别安装有第一带轮和第二带轮,所述第二传动轴的两侧分别安装有第三带轮和第四带轮,所述第一带轮通过所述第一同步带与所述第三带轮连接,所述第二带轮通过所述第二同步带与所述第四带轮连接。
进一步的,所述喷漆机台架在下侧固定有下托架,在上侧安装有可活动的上托架,所述安装框架置于所述下托架与所述上托架之间。所述喷漆机台架的上侧对称设置有导向杆,所述上托架滑动安装在所述导向杆上;所述导向杆上套装有弹簧,所述弹簧始终使所述上托架有向下运动的趋势。
进一步的,所述喷漆机台架上从上往下依次安装有上止点喷枪位置检测传感器、柔性管上端位置检测传感器、柔性管下端位置检测传感器和下止点喷枪位置检测传感器。
进一步的,所述喷漆机台架下侧安装有第一驱动电机,所述第一驱动电机通过第三同步带与所述回转驱动轴驱动连接。所述喷漆机台架下侧安装有第二驱动电机,所述第二驱动电机与所述第二传动轴驱动连接。
(三)有益效果
本发明提供的一种柔性塑管自动往复喷漆机,通过穿引杆、喷枪枪杆以及自动往复喷枪配合,喷涂时通过穿引杆转动带动柔性塑管周转,同时喷枪枪杆向上滑动带动自动往复喷枪滑动对柔性塑管进行喷涂;本柔性塑管自动往复喷漆机,大大降低了操作人员的劳动强度且不需要专业的喷涂作业人员参与,减少了喷涂作业过程油墨涂料的浪费,显著降低人工成本和原材料成本的同时提高了作业效率,提高了自动化程度,从根本上解决了困扰行业发展的难题,克服了现有柔性塑管喷涂效率低、人工强度大以及喷涂成本高的缺陷。
附图说明
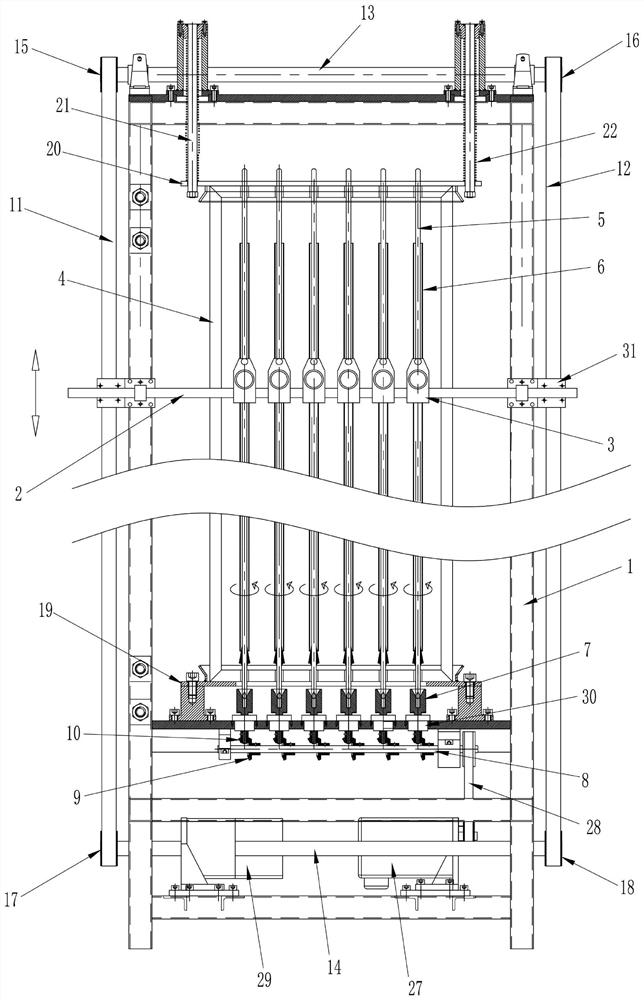
图1为本发明一种柔性塑管自动往复喷漆机的结构示意图;
图2为本发明一种柔性塑管自动往复喷漆机另一角度的结构示意图;
图3为本发明一种柔性塑管自动往复喷漆机上侧的结构示意图;
图4为本发明一种柔性塑管自动往复喷漆机下侧的结构示意图;
图5为本发明一种柔性塑管自动往复喷漆机穿引杆驱动轴与回转驱动轴连接的结构示意图;
图中各个附图标记的对应的部件名称是:1、喷漆机台架;2、喷枪枪杆;3、自动往复喷枪;4、安装框架;5、穿引杆;6、柔性塑管;7、穿引杆驱动轴;8、回转驱动轴;9、第一伞齿轮;10、第二伞齿轮;11、第一同步带;12、第二同步带;13、第一传动轴;14、第二传动轴;15、第一带轮;16、第二带轮;17、第三带轮;18、第四带轮;19、下托架;20、上托架;21、导向杆;22、弹簧;23、上止点喷枪位置检测传感器;24、柔性管上端位置检测传感器;25、柔性管下端位置检测传感器;26、下止点喷枪位置检测传感器;27、第一驱动电机;28、第三同步带;29、第二驱动电机;30、轴承座;31、固定支座。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
参阅图1至图5,本发明提供一种柔性塑管自动往复喷漆机,包括喷漆机台架1和可相对喷漆机台架1在竖直方向上滑动的喷枪枪杆2,喷枪枪杆2上沿直线方向等间距设置有多个自动往复喷枪3;喷漆机台架1上可拆卸安装有安装框架4,安装框架4上沿直线方向等间距设置有多个可转动的穿引杆5,自动往复喷枪3与穿引杆5对应设置,穿引杆5上穿设有待喷漆的柔性塑管6;喷涂时,穿引杆5带动柔性塑管6转动,同时喷枪枪杆2带动自动往复喷枪3滑动对柔性塑管6进行喷涂。
参阅图4和图5,喷漆机台架1上安装有用于驱动穿引杆5转动的回转驱动机构;回转驱动机构包括多个沿直线方向等间距设置在喷漆机台架1上的穿引杆驱动轴7,穿引杆驱动轴7与穿引杆5对应设置,穿引杆5的下端与穿引杆驱动轴7相连接;喷漆机台架1上设置有多个便于穿引杆驱动轴7转动的轴承座30。其中,穿引杆5通过其外扁键安装在穿引杆驱动轴7的内扁键槽中,穿引杆5可轴向移动但不能和穿引杆驱动轴7之间发生相对转动,保证穿引杆驱动轴7与穿引杆5同步转动并方便拆卸。
参阅图4和图5,回转驱动机构还包括转动安装在喷漆机台架1下侧的回转驱动轴8,回转驱动轴8上沿直线方向等间距设置有多个第一伞齿轮9,穿引杆驱动轴7的下端设置有第二伞齿轮10,第二伞齿轮10与第一伞齿轮9相啮合。其中,喷漆机台架1下侧安装有第一驱动电机27,第一驱动电机27通过第三同步带28与回转驱动轴8驱动连接。喷涂时,第一驱动电机27驱动回转驱动轴8转动,回转驱动轴8转动通过第二伞齿轮10与第一伞齿轮9配合带动穿引杆驱动轴7转动,穿引杆驱动轴7转动带动穿引杆5转动。
参阅图3和图4,喷漆机台架1上安装有用于驱动喷枪枪杆2滑动的滑移驱动机构;滑移驱动机构包括设置在喷漆机台架1两侧的第一同步带11和第二同步带12,喷枪枪杆2的两侧分别通过固定支座31安装在第一同步带11和第二同步带12之间。滑移驱动机构还包括转动安装在喷漆机台架1上下两端的第一传动轴13和第二传动轴14,第一传动轴13的两侧分别安装有第一带轮15和第二带轮16,第二传动轴14的两侧分别安装有第三带轮17和第四带轮18,第一带轮15通过第一同步带11与第三带轮17连接,第二带轮16通过第二同步带12与第四带轮18连接。其中,喷漆机台架1下侧安装有第二驱动电机29,第二驱动电机29与第二传动轴14驱动连接。喷涂时,第二驱动电机29驱动第二传动轴14转动,第二传动轴14带动第一同步带11和第二同步带12滑动,从而带动喷枪枪杆2沿竖直方向滑动。
参阅图1和图3,喷漆机台架1在下侧固定有下托架19,在上侧安装有可活动的上托架20,安装框架4置于下托架19与上托架20之间。喷漆机台架1的上侧对称设置有导向杆21,上托架20滑动安装在导向杆21上;导向杆21上套装有弹簧22,弹簧22始终使上托架20有向下运动的趋势。弹簧22一端压在上托架20上产生阻尼作用,同时把安装框架4限制在上、下框架托架之间。此结构,可以方便更换安装框架4,方便上下料。
参阅图2,喷漆机台架1上从上往下依次安装有上止点喷枪位置检测传感器23、柔性管上端位置检测传感器24、柔性管下端位置检测传感器25和下止点喷枪位置检测传感器26。
使用时,安装框架4和穿引杆5作为喷涂作业的工装使用,总是随柔性塑管一起转移到后续热烘烤工序,安装框架4和穿引杆5可以根据作业产品的批量准备若干,喷涂作业前可预先把未喷涂柔性塑管6、穿引杆5、安装框架4按正确顺序组装,供后续喷涂作业使用;第一电机27和第二电机29的输出转速可比例无级调节,自动往复喷枪3的喷幅和涂料流量可比例调节,柔性塑管自动往复喷漆机的控制系统通过PLC进行控制。
喷涂时,开启喷漆机,自动往复喷枪3自下止点向上纵向移动,当运动到柔性塑管的下端位置时,触发喷枪位置检测传感器,输出信号自动往复喷枪开启,开始喷出涂料;当运动到柔性塑管的上端位置时,触发喷枪位置检测传感器,输出信号自动往复喷枪关闭,停止喷涂,自动往复喷枪继续向上移动,当移动到上止点时触发喷枪位置检测传感器,输出信号控制第二电机停止转动,喷涂作业结束;此时可以整体取出安装框架,同时把完成喷涂的多组柔性塑管取下,然后更换安装有待喷涂柔性塑管的新的一组安装框架进行喷涂。
本实施例提供的一种柔性塑管自动往复喷漆机,通过穿引杆、喷枪枪杆以及自动往复喷枪配合,喷涂时通过穿引杆转动带动柔性塑管周转,同时喷枪枪杆向上滑动带动自动往复喷枪滑动对柔性塑管进行喷涂;本柔性塑管自动往复喷漆机,大大降低了操作人员的劳动强度且不需要专业的喷涂作业人员参与,减少了喷涂作业过程油墨涂料的浪费,显著降低人工成本和原材料成本的同时提高了作业效率,提高了自动化程度,从根本上解决了困扰行业发展的难题。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种柔性塑管自动往复喷漆机
- 一种圆柱轮廓工件自动往复喷漆机