一种基于低空拒止系统的低慢小飞行目标指定点诱骗方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明属于无人机管理控制技术领域,特别涉及一种基于低空拒止系统 的低慢小飞行目标指定点诱骗技术。
背景技术
中国专利公开CN108037545A公开了一种针对无人机的定向式光学干扰系 统,包括无人机预警识别装置、无人机定位锁定装置、定向式干扰装置、以及 控制台和能源装置。实现了对无人机进行定向式光学干扰,解决了无人机干扰 手段单一,无法有效对入侵无人机进行光学干扰,导致无法对目标区域的进行 信息防护。通过对入侵无人机进行定向式干扰,将干扰信号定向发射至入侵无 人机,避免了能量的损失和对保护区域产生光学污染,保证了保护区域内生产 生活的正常进行。
中国专利公开CN111999730A公开了一种黑飞无人机飞手定位方法及系统, 依据雷达探测的目标无人机的飞行航迹,通过对目标无人机的地面遥控信号进 行多点悬停、侦测与测向,利用多点交叉定位方法实现目标无人机的操控终端 即飞手的准确定位,并通过光电设备进行取证,具备定位快速且准确、操作简 单、作用距离远等特点,可应用于低空安全防御系统中黑飞无人机操控终端即 飞手的准确定位和取证。
中国专利公开CN112000133A公开了一种低空飞行器/飞手的识别系统、反 制系统及识别方法通过实时侦测、截获和识别管控区域内的低空飞行器信号和 遥控信号,进而根据低空飞行器信号和遥控信号确定低空飞行器的初步位置/飞 手的初步位置;根据低空飞行器的初步位置/飞手的初步位置调用低空飞行器的 初步位置/飞手的初步位置处的监控视频,将视频里的飞行物与预设的低空飞行 器特征进行匹配/将视频里的行人与预设的飞手特征进行匹配,从监控视频识别 出低空飞行器外观信息。
21世纪初以来,无人机行业迅速发展,广泛应用与各行各业。无人机数量、 种类快速增长,功能不断增强,不仅可进行情报监视侦查、目标指示、通信中 继、电子对抗等任务,还可搭载武器执行打击任务,其发展与使用受到各国高 度重视。但随之而来的无人机闯入敏感区域,扰乱航空秩序等现象频繁发生, 存在着极大安全隐患,给社会安保带来了巨大的挑战。因此,反无人机产品应 运而生,军事国防和民用安防领域对此需求快速增长。
目前市面上常见无人机干扰设备为干扰枪,或由单一的侦测设备与干扰设 备组成的系统,其存在侦测精度低、干扰效果差、使用场景受限、无法定向回 收目标等缺点。
发明内容
为解决上述技术问题,本发明提出了一种针对低慢小飞行目标的低空拒止 系统,所述的低空拒止系统包括:频谱侦测设备、雷达探测设备、光电设备、 压制干扰设备、欺骗干扰设备、定位定向设备和车载平台;所述的低空拒止系 统的控制中心通过综控软件与雷达探测设备、频谱侦测设备、光电设备、压制 干扰设备、欺骗干扰设备进行交互,所述的控制中心控制频谱侦测设备、雷达 探测设备和光电设备中的任意一项设备单独进行目标侦测或多个探测设备组合 完成目标侦测任务;所述的控制中心下发控制指令给压制干扰设备、欺骗干扰 设备,控制干扰信号和欺骗信号的产生和发射,并实时监控压制干扰设备、欺骗干扰设备的工作状态;所述的低空拒止系统能够使用多种探测设备发现防护 区域内飞行的低慢小目标,对被发现的低慢小飞行目标进行目标识别与打击。
进一步的,所述的低空拒止系统通过频谱侦测设备侦测目标的频谱信息, 识别被侦测目标的机型和飞行方位信息;频谱侦测设备向所述的控制中心回传 目标方位信息。
进一步的,所述的低空拒止系统的控制中心依据频谱侦测设备提供的目标 方位信息导引雷达探测设备对指定方位附近区域进行目标搜索;当雷达探测到 目标时,通过雷达探测目标位置信息导引光电设备对所述的目标进行搜索,依 据光电设备回传实时图像信息对目标进行二次确认。
进一步的,所述的低空拒止系统的光电设备通过图像处理算法,搜索到目 标后锁定目标并自动跟踪目标,同时,雷达探测设备的工作模式由搜索模式转 换为单目标跟踪模式,为控制中心提供精度更高、刷新率更快的目标位置信息。
进一步的,所述的低空拒止系统的控制中心确定被侦测的目标接近防御红 线区域,通过综控软件启动指定点诱骗系统并联动压制干扰设备与欺骗干扰设 备,对目标进行干扰和打击。
进一步的,所述的低空拒止系统对目标执行干扰和打击的措施包括但不限 于:通过系列控制策略,联动压制干扰设备和欺骗干扰设备协同工作,切断无 人机与无人机的遥控器的通信,由欺骗干扰设备接管无人机的控制,控制中心 解算无人机当前位置并设定指定的诱骗位置,实时生成诱骗GPS信息发送至无 人机,控制其向指定的诱骗位置飞行,待无人机抵达指定的诱骗位置后转为迫 降模式,使无人机原地降落,完成无人机的回收。
本发明还提供一种基于低空拒止系统的低慢小飞行目标的指定点诱导方法,所述方法包括以下步骤:
步骤1,所述的低空拒止系统的控制中心控制雷达探测设备跟踪被频谱侦测 设备发现的飞行低慢小飞行目标,向控制中心回传被跟踪目标的实时方位角、 俯仰角、速度、距离信息;
步骤2,所述的控制中心依据雷达探测到的低慢小飞行目标的目标方位角、 目标俯仰角,控制压制干扰设备和欺骗干扰设备的转台转动,使压制干扰设备 和欺骗干扰设备对准目标;
步骤3,控制中心控制打开欺骗干扰设备,根据飞行目标与低空拒止系统的 距离,设定欺骗干扰设备发射功率值,发送压制干扰信号,切断飞行目标与卫 星信号的通路;
步骤4,同时控制中心欺骗干扰设备生成虚假GPS信息对无人机进行诱骗;
步骤5,打开压制干扰设备,压制无人机遥控器的控制信号,避免无人机与 其遥控器重连导致诱骗失效,让其始终处于欺骗干扰设备控制下;
步骤6,待飞行目标接近或抵达诱骗终点位置,欺骗干扰设备开启迫降功能, 向飞行目标发送降落区GPS坐标,控制飞行目标自动降落,同时控制欺骗干扰 设备对目标进行持续干扰,直至目标落地。
进一步的,所述的步骤4包括子步骤:
步骤4.1,控制中心接收雷达探测设备回传的飞行目标实时,生成将飞行目 标诱骗到的位置的位置信息;
步骤4.2,所述的控制中心计算飞行目标的实时位置和诱骗位置的相对距离 和方位,解算出诱骗控制的方位信息,并生成一组虚假GPS数据,由欺骗干扰 设备发送给目标无人机,执行指定方位诱骗功能。
进一步的,所述的雷达探测设备回传的飞行目标实时位置信息包括:经纬 度、方位角、俯仰角、距离。
进一步的,所述的步骤5的打开压制干扰设备的操作和欺骗干扰的操作交 替反复执行,阻止无人机与其遥控器重建连接通讯而导致诱骗干扰失效。
本发明的方法可对防护区域内的黑飞无人机目标,进行有效的侦测、干扰 与打击,可将无人机诱骗至指定位置并迫降,完成黑飞无人机的收集,可作后 续举证使用。
附图说明
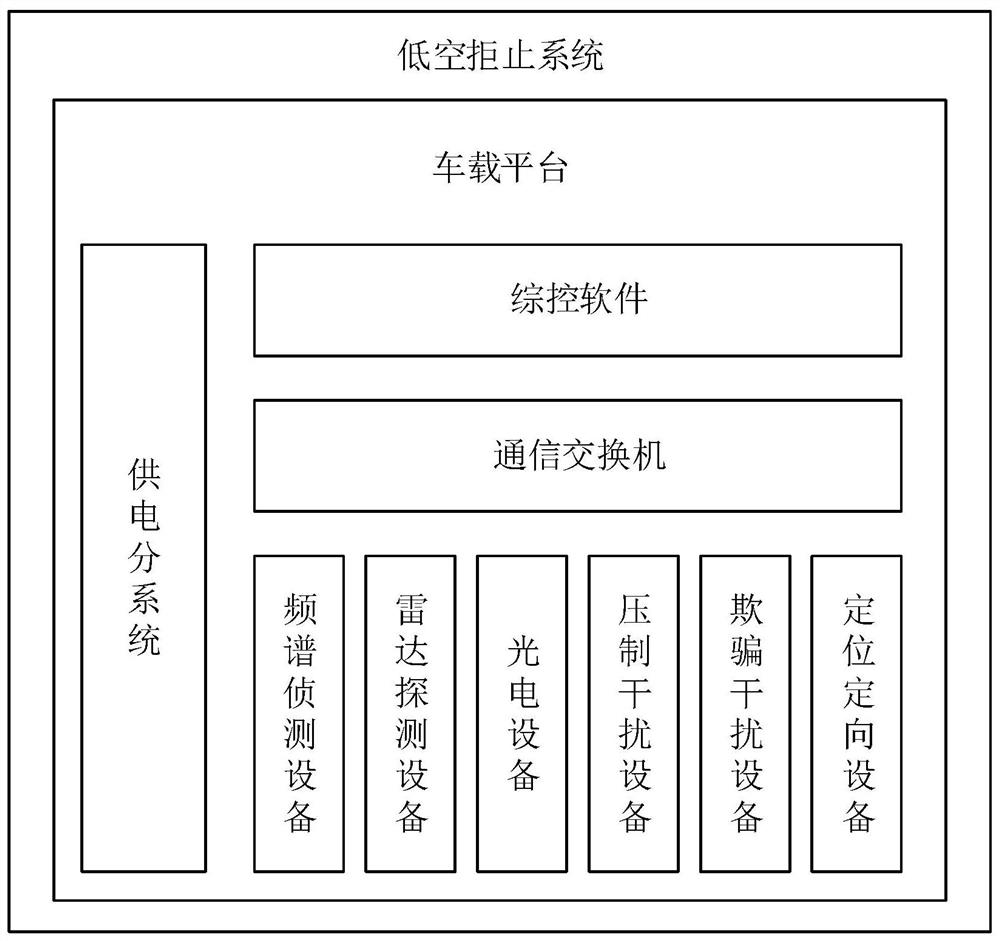
图1是本发明低空拒止系统组成示意图;
图2是本发明的指定点诱骗工作流程。
图3是本发明的指定点诱骗功能工作流程图。
具体实施方式
本发明提出一种低慢小飞行目标指定点诱骗技术及系统。该系统集目标侦 查、探测、干扰等功能于一体,针对低慢小无人机目标(飞行高度低,飞行速 度慢,体积小),设计了一种有效拒止方法,对其进行打击,最终降落在指定区 域,完成无人机的回收,有效保障监测区域低空安全。本发明提供的低空拒止 系统,集目标侦查、探测、干扰、指定位置诱骗及迫降等功能于一体,针对飞 行高度低,飞行速度慢,体积小的小型无人机一类低慢小飞行目标,设计了一 种有效的侦查、探测、干扰方法,对黑飞无人机进行有效的打击,以保障指定 监测区域低空安全。
(1)通过频谱侦测设备侦测目标,提供大致方位信息,引导雷达对该方位 进行搜索,提高了雷达的搜索效率,同时避免因建筑物等遮挡导致雷达探测效 果不佳,造成目标漏检。
(2)通过雷达探测设备引导光电设备搜索并跟踪目标,双设备同时探测并 确认目标后再进行干扰打击处置,提高系统工作效率,避免其他飞行物或杂波 对目标判定造成干扰,及无用的打击。
(3)通过雷达实时跟踪目标,为系统提高了更高频率、更高精度的目标位 置信息,为后续指定点诱骗功能提供数据支撑,以及更精确的诱骗指令。
(4)通过一系列控制策略,联动压制干扰设备、欺骗干扰设备协同工作, 切断无人机与遥控器的通信,由欺骗干扰设备接管无人机的控制,通过解算无 人机当前位置及诱骗位置,实时生成诱骗GPS信息发送至无人机,控制其向指 定位置飞行,待无人机抵达指定位置后转为迫降模式,使无人机原地降落,完 成无人机的回收。
本发明提出一种低慢小飞行目标指定点诱骗技术及系统是由频谱侦测设 备、雷达探测设备、光电设备、压制干扰设备、欺骗干扰设备、定位定向设备、 车载平台及综控软件共同组成的无人机防御系统,各设备均安装于车载平台上, 机动性高,其系统组成见附图1。
频谱侦测设备、雷达探测设备与光电设备组成目标侦查探测分系统,可适 配不同的工作场景,由单个设备或多个设备组合完成目标侦测任务。其中,频 谱侦测设备为低功率无源侦测设备,通过无线电测向及交叉定位的方式,对无 人机威胁目标进行无源侦测;雷达探测设备为高功率探测设备,通过发射高功 率、高频率电磁波,采集目标回波信号,经数据处理后形成高精度的目标位置、 速度等信息,具备全天候、全天时工作的特点;光电设备通过高性能可见光镜 头,输出高分辨率图像,具备快速变倍聚焦功能,可采集目标图像数据,供后 续举证使用,同时配备红外光镜头,保障夜间工作场景目标监视。
由压制干扰设备与欺骗干扰设备组成目标干扰打击分系统,可适配不同的 工作场景,使用单个设备或两个设备组合完成目标打击任务。其中,压制干扰 设备为高功率干扰设备,可压制无人机通讯信号,实现无人机迫降与返航的打 击方式;欺骗干扰设备为低功率干扰设备,可通过发送虚假GPS信息给无人机, 接管无人机控制权,诱骗其按指定方式飞行,实现无人机迫降与指定方向驱离 的打击方式。干扰设备均具备较大的波束覆盖范围,即更宽的干扰范围,在目 标位置信息精度较低的情况下,通过波束覆盖目标,亦可实现目标干扰打击。
整个系统由车载供电设备供电,综控软件通过交换机完成与各个设备(雷 达探测设备、频谱侦测设备、光电设备、压制干扰设备、欺骗干扰设备)的通 信。具体包括下发控制指令控制各设备工作,接收各设备反馈各类信息,实时 监控各设备状态,监控整个系统的工作、运行状态,具备指定监测区域态势展 示、监测目标信息显示、目标飞行航迹显示、目标光电监测图像显示、目标一 键处置等功能,进行防护区域飞行低慢小目标识别与打击,完成低空拒止任务。
系统工作流程如下,其工作流程图见附图2。
(1)启动综控软件,根据防护区域要求,配置工作场景及工作设备。
(2)设备上电,通过综控软件建立与各个设备的通信链路,完成设备自检。
(3)通过定位定向设备回传当前GPS位置信息及方位信息,完成各个设备 的标校,使各个设备坐标统一。
(4)打开侦查探测设备,开始防护区域监测工作。
当该区域内有无人机飞行时,频谱侦测设备可侦测到目标的频谱信息,识 别目标机型及飞行方位信息;通过频谱侦测设备回传目标方位信息,指引雷达 探测设备对指定方位附近进行目标搜索;若无法使用频谱侦测设备时,可由雷 达探测设备直接进行360°全方位搜索;当雷达探测到目标时,通过雷达探测目 标位置信息指引光电设备进行搜索,根据光电设备回传实时图像信息,可对目 标进行二次确认;光电设备通过图像处理算法,搜索到目标后,锁定目标并自 动跟踪目标,同时,雷达探测设备由搜索模式转换为单目标跟踪模式,为系统 提供精度更高、刷新率更快的目标位置信息;若目标接近防御红线区域,可启动指定点诱骗功能,联动压制干扰设备与欺骗干扰设备,对目标进行干扰打击。
指定点诱骗功能流程如下,其工作流程图见附图3。
(1)首先,通过雷达探测设备跟踪目标,回传目标实时方位角、俯仰角、 速度、距离等信息,通过目标方位角、俯仰角,控制压制干扰设备与欺骗干扰 设备转台转动,对准目标。
(2)打开欺骗干扰设备,根据目标当前与防御中心(即设备位置)的距离, 设定欺骗干扰设备发射功率值,发送一个短暂的压制干扰信号,切断目标无人 机与卫星信号的通路,此时无人机处于悬停状态,并记录当前GPS坐标信息。
(3)通过雷达探测设备回传目标实时位置信息(经纬度、方位角、俯仰角、 距离等),以及要将目标诱骗到的位置信息,计算其相对位置,解算出诱骗控制 的方位信息。
由定位定向设备回传系统部署位置信息,包括经度Lng1、纬度Lat1、高度 H1、寻北角N,由雷达探测设备回传目标方位角A,目标俯仰角E,目标欧式距 离D。则目标经度Lng2、目标纬度Lat2、目标高度H2为:
Rc=6378137
Rj=6356725
H2=H1+D*cos(E)
若诱骗位置为经度Lng3、纬度Lat3、高度H3,则诱骗方位C为:
LngDiff=Lng3-Lng2
LatDiff=Lat3-Lat2
由以上信息生成一组虚假GPS数据,通过欺骗干扰设备发送给目标无人机, 执行指定方位诱骗功能。
(4)根据诱骗控制方位信息,通过欺骗干扰设备生成虚假GPS数据模拟卫 星数据,发送至无人机对其进行诱骗。无人机具备一定的错误信息过滤能力, 当其接收到该GPS数据后,与之前记录位置信息比较,若位置变化过大,则判 断为无效数据不予响应;若诱骗GPS数据发送间隔过长,无人机接收两次诱骗 GPS坐标位置变化过大,也会判定为无效数据不予响应,导致诱骗失败。因此, 雷达探测设备单目标跟踪模式下提供的高频率、高精度目标位置信息,为欺骗 干扰设备实时生成高精度且有效的GPS数据提供支持。无人机接收到欺骗干扰 设备发送的虚假GPS数据且判断为有效数据后,由于无人机处于悬停状态,其 实际位置并未发生改变,但虚假GPS数据使无人机误认为当前位置有偏差,为 纠正自身位置,会向之前悬停时记录GPS位置方向即诱骗路径飞行,无人机持 续接收坐标信息连续的GPS虚假数据,即可实现指定方向持续诱骗飞行。
(5)打开压制干扰设备,压制无人机遥控器的控制信号及卫星信号,避免 无人机接收正确的卫星信号,或与其遥控器重连导致诱骗失效,让其始终处于 欺骗干扰设备控制下。
(6)待目标接近、抵达诱骗终点位置,欺骗干扰设备开启迫降功能,向无 人机发送禁飞区GPS坐标,无人机识别后会自动开始降落,通过欺骗干扰设备 对目标进行持续迫降打击,直至目标落地。
至此,完成了无人机的指定点诱骗功能。
通过该功能,可对防护区域内的黑飞无人机目标,进行有效的侦测、干扰 与打击,可将无人机诱骗至指定位置并迫降,完成黑飞无人机的收集,可作后 续举证使用。低空拒止系统是由频谱侦测设备、雷达探测设备、光电设备、压 制干扰设备、欺骗干扰设备、定位定向设备及车载平台共同组成的无人机防御 系统,其系统组成见附图1。
本发明的技术方案:
(1)本系统安装于车载平台,相较于传统固定位置安装设备方案,机动性 更高,应用场景更广泛。
(2)本系统集成频谱侦测、雷达探测于一体,可适应各种工作环境。若工 作于电磁信号复杂区域(发射基站)时,频谱侦测设备无法正常工作,可通过 雷达探测设备搜索工作模式实现目标区域的监测;若工作于微功率使用区域(石 油石化)时,雷达探测设备等高功率设备不再适用,可通过频谱侦测设备实现 目标区域的监测;若工作于普通防护区域,通过频谱侦测设备侦测目标,提供 大致方位信息,引导雷达对该方位进行搜索,提高了雷达的搜索效率,同时避 免因建筑物等遮挡导致雷达探测效果不佳,造成目标漏检。
(3)系统配置光电设备,由频谱侦测设备或雷达探测设备探测目标信息, 引导光电设备搜索并跟踪目标,通过光电设备回传目标图像,对目标进行二次 确认,同时采集目标飞行图像数据可供后续举证使用。
(4)多设备组成的侦查探测系统,增加了系统工作环境适应性及稳定性, 多设备同时探测并确认目标后再进行干扰打击处置,提升了系统的可靠性,同 时避免因目标误判造成的无效目标打击,提高系统工作效率。
(5)雷达探测设备可在多目标搜索模式与单目标跟踪模式切换,若工作于 多目标搜索模式时,可实现360°全方位探测;若工作于单目标跟踪模式时,可 为系统提高频率、高精度度的目标位置信息,为后续指定点诱骗功能提供数据 支撑,以生成更精确的诱骗指令。
(6)系统干扰设备由压制干扰设备与欺骗干扰设备共同组成,压制干扰设 备为高功率设备,可压制指定区域指定频段的通信信号,备具备返航与迫降两 种干扰打击方式;欺骗干扰设备为低功率设备,可生成诱骗信息,对无人机目 标进行位置诱骗,具备指定方位驱离与迫降两种干扰打击方式。多种目标打击 手段提高了系统目标处置能力。若工作于导航频段应用较多区域(机场)时, 诱骗设备发送的诱骗信息会对其他正常工作设备造成干扰,可单独使用压制干 扰设备对无人机目标通信频段进行压制干扰,完成目标的打击;若工作于微功 率使用区域(石油石化)时,压制干扰设备等高功率设备不再适用,可通过欺骗干扰设备实现目标无人机目标的干扰打击。若工作于普通监测区域,可联动 两个设备同时对目标进行打击,提高干扰效果与打击效率。
(7)设计了一种指定位置诱骗方式,联动系统各设备协同工作,实现无人 机目标指定点诱骗功能。通过频谱侦测设备、雷达探测设备、光电设备提供目 标侦测信息,及目标图像数据;通过雷达探测设备单目标跟踪模式提供高精度、 高频率的目标位置信息;通过压制干扰设备切断无人机与遥控器的通信,由欺 骗干扰设备接管无人机的控制;通过解算雷达探测设备回传无人机当前位置及 诱骗位置,实时生成虚假GPS数据,由欺骗干扰设备发送至无人机,控制其向 指定位置飞行;待无人机抵达指定位置后转为迫降模式,使无人机原地降落, 完成无人机的回收。
最后应说明的是,以上实施方式仅用以说明本发明实施例的技术方案而非 限制,尽管参照以上较佳实施方式对本发明实施例进行了详细说明,本领域的 普通技术人员应当理解,可以对本发明实施例的技术方案进行修改或等同替换 都不应脱离本发明实施例的技术方案的精神和范围。
- 一种基于低空拒止系统的低慢小飞行目标指定点诱骗方法
- 基于声强探测的低慢小目标飞行速度探测方法及系统