一种电动液压抓具在集装箱装卸设备中的操作系统及方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及一种用于载荷吊挂装置的技术领域,尤其涉及一种电动液压抓具在集装箱装卸设备中的操作系统及方法。
背景技术
电动液压抓斗是一种自带电机、液压泵等液压系统,并通过外部电源驱动实现开闭的的抓斗。抓斗依靠电机的正反转或者液压换向阀来控制抓斗的开闭。电动液压散货抓斗是一种能在各种恶劣环境下从事黄砂、煤炭、矿粉、矿石、水泥等散货装卸的有效工具。抓斗自带液压系统,液压系统的阀组、密封件、阀块等主要元件均采用欧美品牌。液压泵采用恒功率泵,并采用液压伺服系统,系统压力变化可有效控制泵的输出。当达到最大压力的时候,泵的流量极低,从而大大减少了溢流,降低了能耗,降低了油温,以利用长时间连续工作,大大提高了生产效率。抓斗结构简单,操作方便,能在各种恶劣环境下工作。独特的颚瓣曲线特别有利于各类散货的装卸,抓斗上部设有电缆线接口,便于与起重机的联接。
在现有技术中的电动液压抓斗在运作时:
开启循环Ⅰ:
当电动机运转时,液压泵把液压油从油箱泵入,当抓斗需要打开时,液压油通过单向阀经过压力管流到油缸的有杆腔。同时,压力油将液控单向阀回油口打开,油缸无杆腔内油液流入回油管,通过回油过滤器回到油箱内。在油缸活塞杆回缩到缸筒的同时,抓斗逐渐打开。
电动机关闭时,单向阀以及液控单向阀可将油缸内油压锁住,以防止抓斗自动关闭。
闭合循环Ⅱ:
当电动机运转时,液压泵将油泵入压力管,操作电控箱,液压油通过单向阀和压力管进入油缸的无杆腔。同时,压力油将路液控单向阀控制油道被打开,使油缸有杆腔内液压油通过压力管和液控单向阀,经回油管和滤油器,流回油箱。
电动液压抓斗按其结构形式主要分为以下几种:
1)电动液压双瓣抓斗:主要配合单钩起重机用于抓取各类散货,常用于船舶、码头等。
2)电动液压多瓣抓斗:主要配合单钩起重机用于抓取生活垃圾、废钢等物料,常用于环保电厂、钢厂等。
3)电动液压木材抓斗:主要配合单钩起重机用于装卸原木,常用于木材堆场、码头等。
4)电动液压矩形抓斗:主要配合单钩起重机用于航道清理生活垃圾,或用于钢厂装卸火车车厢内的废钢等。
5)电动液压秸秆抓斗:主要配合单钩起重机用于装卸堆垛困扎好的秸秆,常用于环保电厂。
本发明使用的电动液压双瓣抓斗运用液压系统的优点在于:
1)液压系统的阀组、密封件、阀块等主要元件是精密元件。
2)液压泵采用恒功率泵,并采用液压伺服系统,系统压力变化可有效控制泵的输出。当达到最大压力的时候,泵的流量极低,从而大大减少了溢流,降低了能耗,降低了温升,从而保证可以连续24小时工作。
随着集装箱作业量急剧降低,而散杂货作业量特别是散粮进口量持续增加、船舶同期到港频率增多,亟需研发一种通过电动液压来控制打开的新颖抓斗机操作系统、方法,来利于新颖遥控液压抓斗的优异机械性能,提高杂货及散货的作业效率。
近些年,我国港口码头装卸货的货种呈多元化趋势越来越明显,码头在满足集装箱装卸的同时,需要兼顾杂货的装卸。但是集装箱装卸的设计是没有办法带动较大动力的电动液压抓具。单索遥控抓具的抓取能力相对较弱,满足不了生产的需求。因此一种小动力、大抓取力的高效电动液压抓具就显得极为需要。
图1的现有技术中油泵P由集装箱装卸提供的动力工作,输出小流量的压力油。DT1得电后,油缸做升出运动,一般为抓具闭合,开始抓取物料。DT1失电后,DT2得电,油缸做缩回动作,一般为抓具打开,抓具开始卸料。DT1、DT2都不得电的情况下,液压系统待机。
在现有技术中的集装箱装卸中,由于整个系统只能提供小容量的电机动力,如7.5kw,因而不能够在集装箱装卸系统动力源允许的情况下,完成一些大容量的抓取物料动作,此时,对动力源的要求可达到40kw。
有鉴于上述的缺陷,本设计人,积极加以研究创新,以期创设一种效能高的电动液压抓具在集装箱装卸设备中的操作系统及方法,使其更具有产业上的利用价值。
发明内容
为解决上述技术问题,本发明的目的是提供一种夹持速度快且夹持可靠性好的一种电动液压抓具在集装箱装卸设备中的操作系统,它利用起重机动力带动电动液压抓具进行移动,进而实现对物料的夹持、转运、卸料等动作。
本发明的电动液压抓具在集装箱装卸设备中的操作系统,所述操作系统包括电动液压动力系统、装卸动作控制系统和蓄能系统,所述操作系统分别通过回油管路和出油管路与油箱相连通,所述出油管路上依次设有油泵、调压阀和单向阀门,连接所述出油管路上单向阀门和蓄能系统的蓄能管路上依次设有节流阀和开关阀,所述蓄能系统包括若干蓄能器。
进一步的,所述电动液压动力系统和装卸动作控制系统分别用于控制自动液压夹具的闭合和打开。
进一步的,所述蓄能系统包括若干并列排布的蓄能器。
更进一步的,四个所述蓄能器集成布置在电动液压夹具上。
一种电动液压抓具在集装箱装卸设备中的操作方法,包括以下步骤:
1)在电动液压抓具到达物料处并进行抓取之前,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统加油;
2)在电动液压抓具进行抓取时,油泵和蓄能系统一起向电动液压动力系统输出压力油,电动液压动力系统控制油缸做升出运动,电动液压抓具闭合,开始抓取物料;
3)在电动液压抓具抓取完成后,对物料进行搬运,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油;
4)在电动液压抓具进行卸料时,油泵和蓄能系统一起向装卸动作控制系统输出压力油,装卸动作控制系统控制油缸做缩回动作,电动液压抓具打开,开始卸料;
5)在电动液压抓具卸料完成后,重复进行步骤1)之前,油泵继续给蓄能系统补充压力油,重复以上步骤即可完成装卸操作。
进一步的,在所述步骤1)中,调节节流阀的流量,使得所述蓄能系统所需的油量能够在电动液压抓具到达要抓取物并进行抓取之前充满。
进一步的,所述步骤2)中的电动液压动力系统包括电磁换向阀、电磁止回阀和油缸控制组。
进一步的,所述步骤3)中油箱的压力油通过油泵是依次经过出油管路中的调压阀、单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油的,其中调压阀用于在蓄能系统内压力到达调压阀中设定的压力后,压力阀打开,使得油泵不再给蓄能系统补充压力油。
进一步的,所述步骤4)中的装卸动作控制系统包括电磁换向阀、电磁止回阀和油缸控制组。
进一步的,所述蓄能系统包括若干并列排布的蓄能器。
图2的现有技术中油泵P由集装箱装卸提供的动力工作,输出小流量的压力油。DT1得电后,油缸做升出运动,一般为抓具闭合,开始抓取物料。DT1失电后,DT2得电,油缸做缩回动作,一般为抓具打开,抓具开始卸料。DT1、DT2都不得电的情况下,液压系统待机。
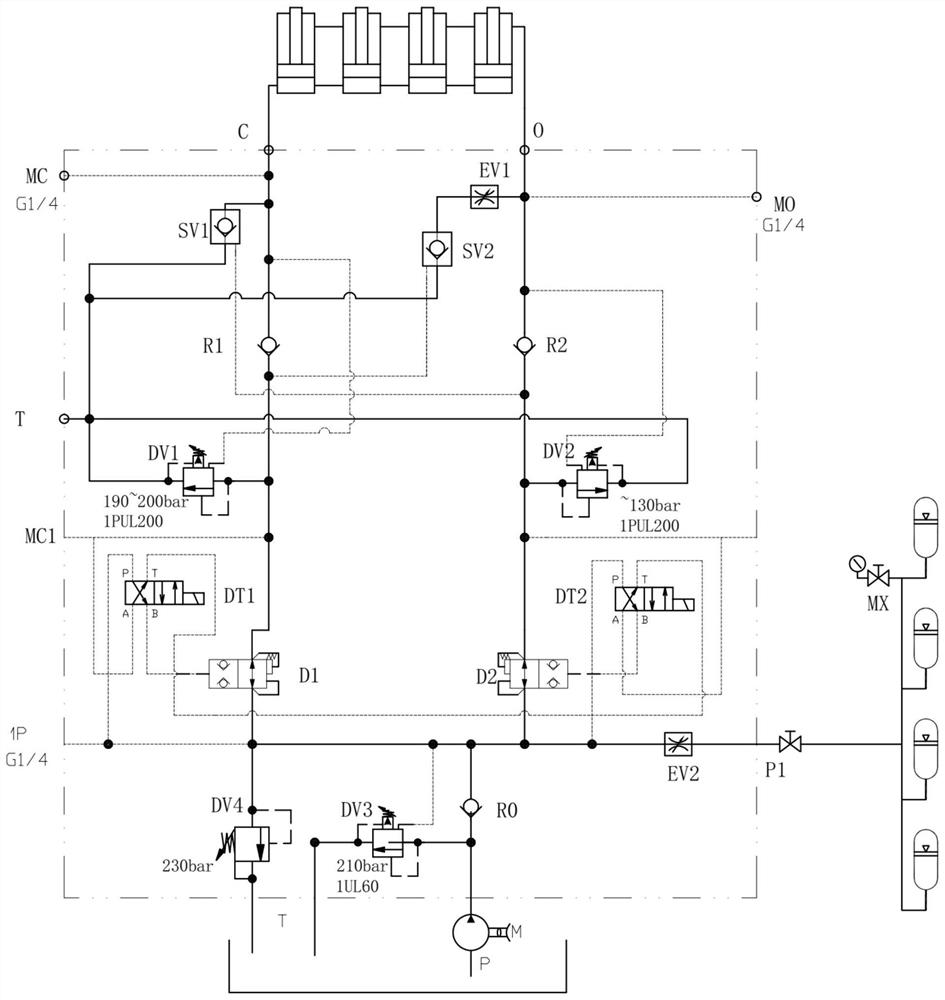
图1是本发明提供的电动液压抓具在集装箱装卸设备中的操作系统,是在现有技术的基础上在蓄能管路上设计一个节流阀EV2,用于调节蓄能系统释放压力油时的速度,另外在油泵P的出油管路上设计一个单向阀,防止蓄能系统释放的压力油倒流进油泵,保护油泵安全。
在出油管路和蓄能系统释之间的管路上设置一个DV3调压阀,在蓄能系统内压力到达DV3设定压力后,打开DV3压力阀,使得油泵不再给蓄能系统补充压力油。当蓄能系统内压力低于一定值后(抓具闭合或者打开),DV3压力阀关闭,油泵继续给蓄能器补充压力油(此时,抓具不工作,起重机在搬运物料)。
整体动作:开机后,小流量的油泵,不再像之前一样待机,而是压力油经过单向阀R0,EV2向蓄能系统补充压力油。(此时起重机在运行至物料上,一般经过计算,补充压力油的时间低于起重机运行至物料上的时间。否则需要有等待时间),当DT1得电后,小流量的油泵和蓄能器一起向油缸输出压力油,油缸做升出运动,一般为抓具闭合,开始抓取物料。DT1失电后,起重机做搬运动作,小流量的油泵将压力油经过单向阀R0,EV2向蓄能器补充压力油。当DT2得电后,小流量的油泵和蓄能器一起向油缸输出压力油,油缸做缩回动作,一般为抓具打开,抓具开始卸料。当DT2失电后,油泵继续给蓄能器充液。
借由上述方案,本发明至少具有以下优点:
1、本发明提供的电动液压抓具在集装箱装卸设备中的操作系统操作简单、夹持速度快且夹持可靠性好,使用起来,进行抓料和卸料的效率高;
2、在利用起重机动力带动电动液压抓具移动的过程中,就可以实现蓄能系统压力油的补充;
3、加快了运行速度的同时,降低了运行成本,提高市场竞争力。
集装箱装卸可以提供小容量的电机动力,由于整个系统只能提供小容量的电机动力,如7.5kw,因而不能够在集装箱装卸系统动力源允许的情况下,完成一些大容量的抓取物料动作,此时,对动力源的要求可达到40kw,我们利用对这个动力源的要求,先建立一套相对较小的液压系统,能够在集装箱装卸系统动力源允许的情况下,缓慢打开闭合,完成抓取物料的必要动作。物料搬运一般由以下动作为一个周期:抓取,搬运,卸料,回程。整个过程中,抓具在抓取、卸料两个环节工作,大约占整个周期的1/8,其他时间内,抓具液压系统在待机状态。根据这一工作特性,我们采用蓄能系统,在抓具液压系统待机的这段时间内,给蓄能系统蓄能,避免时间及能源的浪费。等到抓具需要抓取货物的时候,相应的电磁阀换向,蓄能器和小液压系统同时给抓具油缸提供动力。相当于一个很大的液压系统给液压抓具提供动力,这样一来,原来缓慢的动作,就会变得快速起来。直接的提高了抓具的工作效率。
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
图1是现有技术中的电动液压抓具在集装箱装卸设备中的操作系统的结构示意图;
图2是本发明的电动液压抓具在集装箱装卸设备中的操作系统的结构示意图;
图3是本发明的电动液压抓具在集装箱装卸设备中的电动液压抓具的正视图;
图4是本发明的电动液压抓具在集装箱装卸设备中的操作系统的右视图。
说明书附图中与各个数字标记相对应的名称
1 油缸
2 蓄能器
3 斗瓣
4 吊挂装置
5 电动液压抓具
6 电动液压动力系统/装卸动作控制系统
7 油箱
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
图1至图4所示的一种电动液压抓具在集装箱装卸设备中的操作系统,操作系统包括电动液压动力系统、装卸动作控制系统和蓄能系统,操作系统分别通过回油管路和出油管路与油箱相连通,出油管路上依次设有油泵、调压阀和单向阀门,连接出油管路上单向阀门和蓄能系统的蓄能管路上依次设有节流阀和开关阀,蓄能系统包括若干蓄能器。
本发明提供的电动液压抓具在集装箱装卸设备中的操作系统的原理如下:
操作系统包括电动液压动力系统、装卸动作控制系统和蓄能系统,操作系统分别通过回油管路和出油管路与油箱相连通,其中,回油管路用于回收电动液压动力系统或者装卸动作控制系统的压力油入油箱中,出油管路用于向电动液压动力系统和装卸动作控制系统输出油箱中的压力油,出油管路上依次设有油泵、调压阀和单向阀门,其中,调压阀的开关是为了防止蓄能系统中补充压力油的量过多,导致的压力过大,方便通过调压阀进行调节,单向阀门是为了防止从蓄能系统中流出的压力油回流入油泵中,造成油泵的损坏,连接出油管路上单向阀门和蓄能系统的蓄能管路上依次设有节流阀和开关阀,蓄能系统包括若干蓄能器,可以保证能够向电动液压动力系统或者装卸动作控制系统提供足够储蓄的压力油。
在本实施例中,为了分别控制电动液压抓具的开合,电动液压抓具在集装箱装卸设备中的操作系统包括电动液压动力系统、装卸动作控制系统和蓄能系统,其中电动液压动力系统和装卸动作控制系统是分别用于控制自动液压夹具的闭合和打开,操作系统分别通过回油管路和出油管路与油箱相连通,出油管路上依次设有油泵、调压阀和单向阀门,连接出油管路上单向阀门和蓄能系统的蓄能管路上依次设有节流阀和开关阀,蓄能系统包括若干蓄能器。
在本实施例中,电动液压抓具在集装箱装卸设备中的操作系统包括电动液压动力系统、装卸动作控制系统和蓄能系统,其中电动液压动力系统和装卸动作控制系统是分别用于控制自动液压夹具的闭合和打开,操作系统分别通过回油管路和出油管路与油箱相连通,出油管路上依次设有油泵、调压阀和单向阀门,连接出油管路上单向阀门和蓄能系统的蓄能管路上依次设有节流阀和开关阀,其中,为了向电动液压动力系统和装卸动作控制系统输出足够的压力油,蓄能系统包括四个并列排布的蓄能器。
在本实施例中,电动液压抓具在集装箱装卸设备中的操作系统包括电动液压动力系统、装卸动作控制系统和蓄能系统,其中电动液压动力系统和装卸动作控制系统是分别用于控制自动液压夹具的闭合和打开,操作系统分别通过回油管路和出油管路与油箱相连通,出油管路上依次设有油泵、调压阀和单向阀门,连接出油管路上单向阀门和蓄能系统的蓄能管路上依次设有节流阀和开关阀,蓄能系统包括四个并列排布的蓄能器,四个蓄能器集成布置在电动液压夹具上,这样,集成在电动液压夹具上的四个蓄能器可以跟随电动液压夹具的移动,随时随地的向电动液压动力系统和装卸动作控制系统输出补充的压力油。
一种电动液压抓具在集装箱装卸设备中的操作方法,包括以下步骤:
1)在电动液压抓具到达物料处并进行抓取之前,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统加油;
2)在电动液压抓具进行抓取时,油泵和蓄能系统一起向电动液压动力系统输出压力油,电动液压动力系统控制油缸做升出运动,电动液压抓具闭合,开始抓取物料;
3)在电动液压抓具抓取完成后,对物料进行搬运,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油;
4)在电动液压抓具进行卸料时,油泵和蓄能系统一起向装卸动作控制系统输出压力油,装卸动作控制系统控制油缸做缩回动作,电动液压抓具打开,开始卸料;
5)在电动液压抓具卸料完成后,重复进行步骤1)之前,油泵继续给蓄能系统补充压力油,重复以上步骤即可完成装卸操作。
在本实施例中,一种电动液压抓具在集装箱装卸设备中的操作方法,包括以下步骤:
1)在电动液压抓具到达物料处并进行抓取之前,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统加油,调节节流阀的流量,使得蓄能系统所需的油量能够在电动液压抓具到达要抓取物并进行抓取之前充满;
2)在电动液压抓具进行抓取时,油泵和蓄能系统一起向电动液压动力系统输出压力油,电动液压动力系统控制油缸做升出运动,电动液压抓具闭合,开始抓取物料;
3)在电动液压抓具抓取完成后,对物料进行搬运,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油;
4)在电动液压抓具进行卸料时,油泵和蓄能系统一起向装卸动作控制系统输出压力油,装卸动作控制系统控制油缸做缩回动作,电动液压抓具打开,开始卸料;
5)在电动液压抓具卸料完成后,重复进行步骤1)之前,油泵继续给蓄能系统补充压力油,重复以上步骤即可完成装卸操作。
在本实施例中,一种电动液压抓具在集装箱装卸设备中的操作方法,包括以下步骤:
1)在电动液压抓具到达物料处并进行抓取之前,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统加油;
2)在电动液压抓具进行抓取时,油泵和蓄能系统一起向电动液压动力系统输出压力油,电动液压动力系统控制油缸做升出运动,电动液压抓具闭合,开始抓取物料,电动液压动力系统包括电磁换向阀、电磁止回阀和油缸控制组;
3)在电动液压抓具抓取完成后,对物料进行搬运,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油;
4)在电动液压抓具进行卸料时,油泵和蓄能系统一起向装卸动作控制系统输出压力油,装卸动作控制系统控制油缸做缩回动作,电动液压抓具打开,开始卸料;
5)在电动液压抓具卸料完成后,重复进行步骤1)之前,油泵继续给蓄能系统补充压力油,重复以上步骤即可完成装卸操作。
在本实施例中,一种电动液压抓具在集装箱装卸设备中的操作方法,包括以下步骤:
1)在电动液压抓具到达物料处并进行抓取之前,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统加油;
2)在电动液压抓具进行抓取时,油泵和蓄能系统一起向电动液压动力系统输出压力油,电动液压动力系统控制油缸做升出运动,电动液压抓具闭合,开始抓取物料;
3)在电动液压抓具抓取完成后,对物料进行搬运,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油,油箱的压力油通过油泵是依次经过出油管路中的调压阀、单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油的,其中调压阀用于在蓄能系统内压力到达调压阀中设定的压力后,压力阀打开,使得油泵不再给蓄能系统补充压力油;
4)在电动液压抓具进行卸料时,油泵和蓄能系统一起向装卸动作控制系统输出压力油,装卸动作控制系统控制油缸做缩回动作,电动液压抓具打开,开始卸料;
5)在电动液压抓具卸料完成后,重复进行步骤1)之前,油泵继续给蓄能系统补充压力油,重复以上步骤即可完成装卸操作。
在本实施例中,一种电动液压抓具在集装箱装卸设备中的操作方法,包括以下步骤:
1)在电动液压抓具到达物料处并进行抓取之前,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统加油;
2)在电动液压抓具进行抓取时,油泵和蓄能系统一起向电动液压动力系统输出压力油,电动液压动力系统控制油缸做升出运动,电动液压抓具闭合,开始抓取物料;
3)在电动液压抓具抓取完成后,对物料进行搬运,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油;
4)在电动液压抓具进行卸料时,油泵和蓄能系统一起向装卸动作控制系统输出压力油,装卸动作控制系统控制油缸做缩回动作,电动液压抓具打开,开始卸料,装卸动作控制系统包括电磁换向阀、电磁止回阀和油缸控制组;
5)在电动液压抓具卸料完成后,重复进行步骤1)之前,油泵继续给蓄能系统补充压力油,重复以上步骤即可完成装卸操作。
在本实施例中,一种电动液压抓具在集装箱装卸设备中的操作方法,包括以下步骤:
1)在电动液压抓具到达物料处并进行抓取之前,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统加油;
2)在电动液压抓具进行抓取时,油泵和蓄能系统一起向电动液压动力系统输出压力油,电动液压动力系统控制油缸做升出运动,电动液压抓具闭合,开始抓取物料;
3)在电动液压抓具抓取完成后,对物料进行搬运,油箱中的压力油通过油泵依次经过出油管路中的单向阀以及蓄能管路上的节流阀和开关阀向蓄能系统补充压力油;
4)在电动液压抓具进行卸料时,油泵和蓄能系统一起向装卸动作控制系统输出压力油,装卸动作控制系统控制油缸做缩回动作,电动液压抓具打开,开始卸料;
5)在电动液压抓具卸料完成后,重复进行步骤1)之前,油泵继续给蓄能系统补充压力油,重复以上步骤即可完成装卸操作。
以上步骤中的蓄能系统包括四个并列排布的蓄能器。
图2的现有技术中油泵P需要外部提供较大动力工作,输出大流量的压力油,否则动作时间很长,严重影响装卸效率,具体动作:DT1得电后,油缸做升出运动,一般为抓具闭合,开始抓取物料。DT1失电后,DT2得电,油缸做缩回动作,一般为抓具打开,抓具开始卸料。DT1、DT2都不得电的情况下,液压系统待机。
图1是本发明提供的电动液压抓具在集装箱装卸设备中的操作系统,是在现有技术的基础上在蓄能管路上设计一个节流阀EV2,用于调节蓄能系统释放压力油时的速度,另外在油泵P的出油管路上设计一个单向阀,防止蓄能系统释放的压力油倒流进油泵,保护油泵安全。在出油管路和蓄能系统释之间的管路上设置一个DV3调压阀,在蓄能系统内压力到达DV3设定压力后,打开DV3压力阀,使得油泵不再给蓄能系统补充压力油。当蓄能系统内压力低于一定值后(抓具闭合或者打开),DV3压力阀关闭,油泵继续给蓄能器补充压力油(此时,抓具不工作,起重机在搬运物料)。
整体动作:开机后,小流量的油泵,不再像之前一样待机,而是压力油经过单向阀R0,EV2向蓄能系统补充压力油。(此时起重机在运行至物料上,一般经过计算,补充压力油的时间低于起重机运行至物料上的时间。否则需要有等待时间),当DT1得电后,小流量的油泵和蓄能器一起向油缸输出压力油,这样就相当于一个非常大的动力源在给装卸动作控制系统输出,油缸做升出运动,一般为抓具闭合,开始抓取物料。DT1失电后,起重机做搬运动作,小流量的油泵将压力油经过单向阀R0,EV2向蓄能器补充压力油。当DT2得电后,小流量的油泵和蓄能器一起向油缸输出压力油,这样就相当于一个非常大的动力源在给装卸动作控制系统输出,油缸做缩回动作,一般为抓具打开,抓具开始卸料。当DT2失电后,油泵继续给蓄能器充液。
图3和图4中的电动液压抓斗中的油缸1、蓄能器2、斗瓣3、吊挂装置4、电动液压抓具5、电动液压动力系统/装卸动作控制系统6、油箱7相互配合,其中吊挂装置4用于悬挂整个电动液压抓具5,通过油箱7分别与出油管路和回油管理配合,分别实现向电动液压动力系统6出油以及装卸动作控制系统6的回油,进而通过油缸1的升降控制斗瓣的开合。
本发明提供的一种电动液压抓具在集装箱装卸设备中的操作系统及方法至少具有以下优点:
1、本发明提供的电动液压抓具在集装箱装卸设备中的操作系统操作简单、夹持速度快且夹持可靠性好,使用起来,进行抓料和卸料的效率高;
2、在利用起重机动力带动电动液压抓具移动的过程中,就可以实现蓄能系统压力油的补充;
3、加快了运行速度的同时,降低了运行成本,提高市场竞争力。
集装箱装卸可以提供小容量的电机动力,由于整个系统只能提供小容量的电机动力,如7.5kw,因而不能够在集装箱装卸系统动力源允许的情况下,完成一些大容量的抓取物料动作,此时,对动力源的要求可达到40kw,我们利用对这个动力源的要求,先建立一套相对较小的液压系统,能够在集装箱装卸动力源允许的情况下,缓慢打开闭合,完成抓取物料的必要动作。物料搬运一般由以下动作为一个周期:抓取,搬运,卸料,回程。整个过程中,抓具在抓取、卸料两个环节工作,大约占整个周期的1/8,其他时间内,抓具液压系统在待机状态。根据这一工作特性,我们采用蓄能系统,在抓具液压系统待机的这段时间内,给蓄能系统蓄能,避免时间及能源的浪费。等到抓具需要抓取货物的时候,相应的电磁阀换向,蓄能器和小液压系统同时给抓具油缸提供动力。相当于一个很大的液压系统给液压抓具提供动力,这样一来,原来缓慢的动作,就会变得快速起来。直接的提高了抓具的工作效率。
在本发明的描述中,需要说明的是,说明书和说明书附图中的符号分别表示以下意义:
P 油泵
D1 电动液压动力系统
DT1 电动液压动力系统中的电磁换向阀
SV1 电动液压动力系统中的电磁止回阀
D2 装卸动作控制系统
DT2 装卸动作控制系统中的电磁换向阀
SV2 装卸动作控制系统中的电磁止回阀
EV2 节流阀
DV3 调压阀
R0 单向阀
P1 开关阀
在现有技术中的电动液压抓斗在运作时:
开启循环Ⅰ:
当电动机运转时,液压泵把液压油从油箱泵入,当抓斗需要打开时,液压油通过单向阀经过压力管流到油缸的有杆腔。同时,压力油将液控单向阀回油口打开,油缸无杆腔内油液流入回油管,通过回油过滤器回到油箱内。在油缸活塞杆回缩到缸筒的同时,抓斗逐渐打开。
电动机关闭时,单向阀以及液控单向阀可将油缸内油压锁住,以防止抓斗自动关闭。
闭合循环Ⅱ:
当电动机运转时,液压泵将油泵入压力管,操作电控箱,液压油通过单向阀和压力管进入油缸的无杆腔。同时,压力油将路液控单向阀控制油道被打开,使油缸有杆腔内液压油通过压力管和液控单向阀,经回油管和滤油器,流回油箱。
运用液压系统的优点在于:
1)液压系统的阀组、密封件、阀块等主要元件是精密元件。
2)液压泵采用恒功率泵,并采用液压伺服系统,系统压力变化可有效控制泵的输出。当达到最大压力的时候,泵的流量极低,从而大大减少了溢流,降低了能耗,降低了温升,从而保证可以连续24小时工作。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
以上仅是本发明的优选实施方式,并不用于限制本发明,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
- 一种电动液压抓具在集装箱装卸设备中的操作系统及方法
- 一种电动液压抓具在集装箱装卸设备中的操作系统