一种基于生物力学的足踝损伤康复方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及一种康复装置,尤其涉及足部康复装置
背景技术
踝关节作为人体重要的承重关节,在人体完成站立、行走、弹跳等动作时扮演着不可或缺的角色,因而踝关节也承受着巨大的压力。人体活动时,因地面不平、姿势不正确或受到过大的外力作用等使踝关节活动范围超出其极限活动范围,造成关节周围组织关节囊、韧带和肌腱等严重损坏,这在医学上被称为关节扭伤。踝关节扭伤是骨科临床最常见的骨骼创伤之一。为帮助关节活动和促进关节软骨组织的修复,其治疗需要准确的骨骼复位和坚硬的内固定。受伤后患者的踝关节附近会出现瘀血、发肿,治疗早期及时活动和针对性锻炼有助于减轻关节周围的肿胀现象,减少治疗时间。若发生踝关节损伤后不及时治疗,则容易导致踝关节韧带过分松弛,造成关节不稳,引起反复扭伤,演化成踝关节功能性障碍,甚者会丧失正常行走能力。临床实验证明,借助外力辅助的功能康复锻炼能促进血液循环,保持关节周围的正常肌力,有效的帮助踝关节损伤康复。由于现代人普遍缺乏运动、人口老龄化影响,踝关节损伤人数增加,但对应医师数量不足,不能满足患者的治疗需要。为了减轻治疗医师的劳动强度,更有针对性的进行踝关节损伤康复锻炼,达到更完美的治疗效果,踝关节康复装置的研发受到了相关领域研究人员的重视。
踝关节康复装置研究已有多年,国内外各种康复装置屡见不鲜。Yoon等人设计了一个并行的可重构机器人,它可进行大范围的各种锻炼。这个机器人允许脚踝和脚的运动,具有四个自由度,有气动执行器驱动。P.K.Jamwal和他的合作者开发了一种软性平行踝关节康复机器人,它以四块空气人工肌肉作为执行器。该装置为踝关节提供了三个旋转自由度,以在必要的范围里运动和肌肉强化训练。C-M Racu等提出一种低成本,易于制造的康复装置。该装置在确保功能性的同时还具有小尺寸和轻质量。为避免损伤关节,其在电机和机械传动装置之间设有柔顺关节。Michal Olinski等人开发了一种支持人踝关节康复的装置,该装置能测量各种参数,以便诊断人体状态,可进行个性化治疗。
刘更谦等提出了一种适用于踝关节康复的3-RSS/S并联机构方案,其具有结构紧凑、惯量小、承载能力较强的优点,且较于其他杆长伸缩型并联机构更易于实现力反馈。李大顺等人提出一种结构简单,能够同时完成主被动康复运动,具有远程转动中心的对称3-RRS并联康复机构。该机构具有三自由度定点转动功能,可以完成踝关节相应的背屈、跖屈、外展、内收康复运动。吴俊鹏等人设计的踝关节康复装置,在踝关节矢状面内对脚踝进行康复锻炼。该装置可实现被动和半被动两种康复模式,康复训练涉及的参数既可以有医生诊断信息后进行设定,又可以在康复锻炼中根据患者的反馈脚踝信息不断进行调整,是损伤踝关节得到更科学有效的康复治疗。白杨等人提出了一种便携式动力踝足矫形器,采用电动机驱动,在患者行走期间提供踝背屈和足底屈曲辅助,以促进踝关节的康复。
发明内容
本发明所要解决的主要技术问题是提供一种基于生物力学的足踝损伤康复方法,大幅减少了人力成本,同时装置可根据患者病况提供个性化的定制方案。
为了解决上述的技术问题,本发明提供了一种基于生物力学的足踝损伤康复方法,包括以下步骤:
1)基于正常人在自然状态下的足踝弯曲活动以及CT扫描的数据,结合了足踝损伤的足部生物力学分析,建立了足踝损伤患者的初始有限元运动模型;
2)在足踝损伤康复装置与足部接触位置,依据跖骨、指骨、足弓、足跟部位划分九个区域;在足踝损伤康复装置上的九个区域内分别加装感应器,启动装置后,加装感应器测出各个区域的速度、位移和加速度参数,并记录不同档位调节后参数的改变,再将此数据作为仿真设置的激励参数,作用在初始有限元运动模型中进行仿真足部应力分析;
3)通过仿真足部应力分析,反映足部受力情况甚至疼痛程度,以应力表现为参考对档位进行适当调节,得到修正的激励参数将再次进行生物力学仿真分析,多次调节直至足部应力表现满足患者需要。
在一较佳实施例中:所述足踝损伤康复装置具体包括:前板、斜板、水平板和第一驱动电机;
所述水平板的前端与斜板的前端铰接,前板设置在斜板和水平板的后端之间以形成三角形结构,所述前板的上端与斜板的底面顶抵;所述第一驱动电机带动前板摆动以使得斜板绕着前端摆动。
在一较佳实施例中:所述第一驱动电机与前板下端的转轴传动连接,以带动前板绕着转轴转动。
在一较佳实施例中:所述斜板的下表面沿着长度方向设置有滑槽,所述前板的上端设置有与所述滑槽滑动配合的滑块。
在一较佳实施例中:所述前板的下端设置有凹槽,水平板的后端设置有凸耳,所述凸耳置于凹槽内,所述转轴分别穿过所述凸耳与凹槽。
在一较佳实施例中:还包括两块升降板,其设置在水平板底部的两侧,用于带动水平板和斜板升降。
在一较佳实施例中:两块升降板分别与一第二驱动电机连接,所述第二驱动电机用于带动升降板升高和降低。
在一较佳实施例中:所述第二驱动电机通过凸轮与升降板连接,所述升降板远离凸轮的一端与的水平板的左侧或右侧连接;所述凸轮转动时带动所述升降板抬高或回落。
在一较佳实施例中:所述两块升降板之间通过连接板连接,所述连接板上设置有弹簧缓冲的定角度旋转机构,所述弹簧缓冲的定角度旋转机构以带动所述足部水平板在一定角度范围内旋转。
在一较佳实施例中:所述弹簧缓冲的定角度旋转机构包括半圆环形的旋转副和半圆环形的弹簧;所述半圆环形的旋转副和半圆环形的弹簧置于一圆环凹槽内,并且旋转副通过转轴连接所述足部支撑板。
相较于现有技术,本发明的技术方案具备以下有益效果:
本发明提供的一种基于生物力学的足踝损伤康复方法,基于生物力学的运动仿真分析使装置的应力、加速度、位移等参数更为严谨和精确,与病况匹配,同时阻尼的调整保证了患者不会造成二次损伤,并提升患者主动、被动训练过程的舒适度;基于Abaqus开发的二次平台实现力学分析、能量分析过程的参数化,与患者情况的多次比对使装置动力参数直观、准确;平台也带来高效率的计算过程,为患者提供及时的康复处理方案,避免错过最佳治疗时期。且为患者后续的病情恢复设立更科学的矫正周期,实现高效率的动态康复过程。
本发明提供了一种基于生物力学的足踝损伤康复方法,参考足踝损伤患者治疗方案中的训练动作进行机构设计,运行时有3种运动方案,可完美匹配社会上绝大多数足踝受伤的情况,均可找到解决方案。首先是模拟背伸、跖屈训练:前部电机启动,带动前板相对于水平板旋转,斜板上有滑轨,前板在旋转时被限制在滑轨内,沿着滑轨移动,就可以带动斜板升高或者降低,将限位在斜板上的脚底调升,来达到按摩足踝部的目的。其次是模拟人工辅助足踝内、外翻训练过程,凸轮升降板机构将水平板一边抬高,利用四角缓冲器实现变位之后回位的稳定,防止震荡产生,让装置更加稳定安全;最后是模拟左右平面旋转运动,将足部限位后,底部的电机带动输出轴旋转,轴上连接的半圆定角度旋转机构可在电机的控制下实现一定角度的旋转,搭配弹簧缓冲结构,达到平稳过渡换向,防止二次足踝损伤的作用,整体装置安全性能好,功能完善,设计简单,减少过度复杂的机械结构可减低装置故障率且降低开发成本,同时提高装置的安全性和耐用性。
附图说明
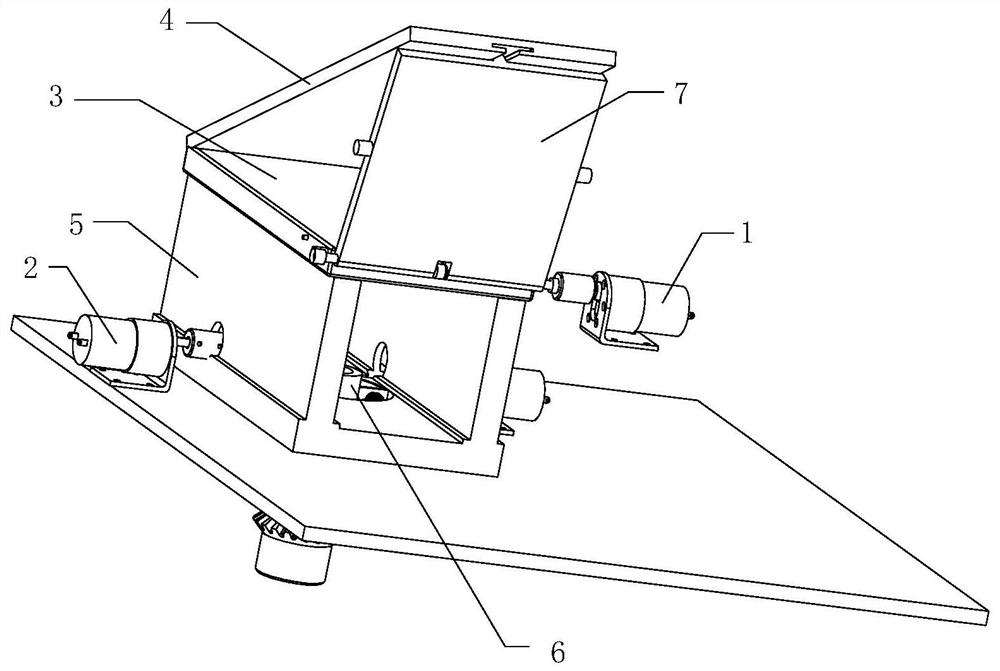
图1为本发明优选实施例的立体图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
参考图1,本实施例提供了一种基于生物力学的足踝损伤康复装置,包括:电机原动件、凸轮-升降板机构、四角阻尼器支撑结构、足部支撑板、弹簧缓冲的定角度旋转机构;
所述电机原动件包括第一驱动电机1,以及连接两个凸轮-升降板机构的凸轮的第二驱动电机2;
所述足部支撑板包括一水平板3和与水平板3成锐角夹角的斜板4;所述水平板3用于与所述四角阻尼器支撑结构、升降板5和弹簧缓冲的定角度旋转机构6连接,斜板4用于放置脚部。
所述水平板3的前端与斜板4的前端铰接,前板7设置在斜板4和水平板3的后端之间以形成三角形结构,所述前板7的上端与斜板4的底面顶抵;所述第一驱动电机1带动前板7摆动以使得斜板4绕着前端摆动。
所述第一驱动电机1与前板7下端的转轴传动连接,以带动前板7绕着转轴转动。
为了实现前板7的定向摆动,所述斜板4的下表面沿着长度方向设置有滑槽7,所述前板7的上端设置有与所述滑槽7滑动配合的滑块。
为了安装所述转轴,所述前板7的下端设置有凹槽,水平板3的后端设置有凸耳,所述凸耳置于凹槽内,所述转轴分别穿过所述凸耳与凹槽。
所述凸轮-升降板5机构中的升降板5,其远离凸轮的一端与足部支撑板的底部左侧或右侧连接;所述第二驱动电机2带动凸轮转动时带动所述升降板5抬高或回落;
所述四角阻尼器支撑结构连接在足部支撑板的四个角上;
所述弹簧缓冲的定角度旋转机构6与所述足部支撑板连动连接,以带动所述足部支撑板在一定角度范围内旋转。
所述前板7的一端与水平板3转动连接,另一端与所述万向节连接并与斜板4的下部活动抵接。
由于凸轮-升降板5机构带动水平板3倾斜时,会让四角阻尼器支撑结构发生形变,为了让四角阻尼器支撑结构具有一定的抗形变能力,所述四角阻尼器支撑结构中沿着高度方向设置有弹簧。
所述弹簧缓冲的定角度旋转机构6包括半圆环形的旋转副和半圆环形的弹簧;所述半圆环形的旋转副和半圆环形的弹簧置于一圆环凹槽内,并且旋转副通过转轴连接所述足部支撑板。
上述的一种以凸轮-升降板5结构治疗足踝损伤的康复装置,参考足踝损伤患者治疗方案中的训练动作进行机构设计,运行时有3种运动方案,可完美匹配社会上绝大多数足踝受伤的情况,均可找到解决方案。
首先是模拟背伸、跖屈训练:第一驱动电机1启动,前板7相对于水平板3转动,斜板4上有滑轨,前板7在转动时被限制在滑轨内,沿着滑轨移动,就可以带动斜板4升高或者降低,将限位在斜板4上的脚底调升,来达到按摩足踝部的目的。
其次是模拟人工辅助足踝内、外翻训练过程,第二驱动电机2带动凸轮-升降板5机构将水平板3一边抬高,利用四角缓冲器实现变位之后回位的稳定,防止震荡产生,让装置更加稳定安全;
最后是模拟左右平面旋转运动,将足部限位后,底部的电机带动输出轴旋转,轴上连接的半圆定角度旋转机构6可在电机的控制下实现一定角度的旋转,搭配弹簧缓冲结构,达到平稳过渡换向,防止二次足踝损伤的作用。
该整体装置安全性能好,功能完善,设计简单,减少过度复杂的机械结构可减低装置故障率且降低开发成本,同时提高装置的安全性和耐用性。
本实施例中还提供了一种基于生物力学的足踝损伤康复方法,包括以下步骤:
1)基于正常人在自然状态下的足踝弯曲活动以及CT扫描的数据,结合了足踝损伤的足部生物力学分析,建立了足踝损伤患者的初始有限元运动模型;
2)在足踝损伤康复装置与足部接触位置,也就是上述装置的斜板4,依据跖骨、指骨、足弓、足跟部位划分九个区域;在足踝损伤康复装置上的九个区域内分别加装感应器,启动装置后,加装感应器测出各个区域的速度、位移和加速度参数,并记录不同档位调节后参数的改变,再将此数据作为仿真设置的激励参数,作用在初始有限元运动模型中进行仿真足部应力分析;
3)通过仿真足部应力分析,反映足部受力情况甚至疼痛程度,以应力表现为参考对档位进行适当调节,得到修正的激励参数将再次进行生物力学仿真分析,多次调节直至足部应力表现满足患者需要。
步骤1中,采用Philips/Brilliance 64排螺旋CT对志愿者足部进行扫描,经X线检查证实足部无骨折、畸形、肿瘤等骨质破坏。得到的足部CT图像数据以DICOM格式输出保存,其后将其导入医学专用CT读取软件MIMICS,选取相应的阈值进行骨骼的提取,并进行相应的处理计算生成一个表面粗糙的足部骨骼3D模型,再经过Geomagic Studio软件和UG软件进行一定的表面光顺处理,从而得到足踝损伤患者的初始有限元运动模型。
步骤2中,基于Abaqus开发的二次平台实现力学分析、能量分析过程的参数化,与患者情况的多次比对使装置动力参数直观、准确;平台也带来高效率的计算过程,为患者提供及时的康复处理方案,避免错过最佳治疗时期。且为患者后续的病情恢复设立更科学的矫正周期,实现高效率的动态康复过程。
步骤3中,通过基于Abaqus开发的二次平台输出的ODB结果文件的应力峰值、加速度峰值等参数的反馈,如应力不应大于7Mpa,依据患者的病情程度、病况时期以及疼痛程度的预估,并对装置的初始力学参数做出调整,直至足踝部模型应力表现、活动范围、转动角度等参数满足患者的治疗要求及舒适程度,正常踝关节可背屈、跖屈各45°,内翻40°,外翻35°,为避免二次伤害,其活动范围应都降低5°。在多次的数据比对和分析,最终完善装置与患者足踝部匹配的参数。在整个康复过程中,需对不同阶段的骨密度进行科学评估,以便为患者设定长期的训练方案。
以上所述,仅为本发明较佳的具体实施方式,但本发明的设计构思并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,利用此构思对本发明进行非实质性的改动,均属于侵犯本发明保护范围的行为。
- 一种基于生物力学的足踝损伤康复方法
- 一种基于足底压力检测的支持向量机足踝外伤康复评估结果的分类方法