基于图像分析和记录的路边停车位无人化管理方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及基于图像分析和记录的路边停车位无人化管理方法,属于智慧城市与交通技术领域。
背景技术
随着社会的发展,生活水平的提高,城市汽车越来越多。为了解决停车难的问题,在道路两旁规划了许多停车位。因为位置分散,不利于进行集中管理,需要配置管理人员,但是地处露天,并且管理范围很大,给管理工作带来很多困难。因此需要无人化管理。
路边的停车位有三种类型:数量较少的是直进式和斜进式的,对于这两种停车位,可以在停车位底部设置摄像机进行车牌识别,能够较好的解决停车收费问题;数量较多的是侧进式停车位。侧进式停车位的摄像机只能安装在侧面,不利于拍摄车辆的车牌图像。专利201610864227X提出一种双目结构的抓拍装置,安装在两个停车位之间,可以同时拍摄前后两个停车位上的车辆车牌信息。该方案可以解决车辆停车位置过于靠前或者靠后的情况下,无法抓拍到车牌的问题。但是该方案导致设备投入成本增加一倍。
发明内容
本发明的目的是为了解决上述问题,提供一种基于图像分析和记录的路边停车位无人化管理方法,以单目摄像机完成车辆停入和驶出停车位的检测,实现无人化的停车位收费管理。
本发明解决其技术问题所采用的技术方案是:
基于图像分析和记录的路边停车位无人化管理方法,应用于道路两旁的侧进式停车位的无人化停车收费管理,所述的停车位的四周设置前车位分界线、后车位分界线、外边界线和内边界线,内部设置表示停车方向的三角标记,所述的停车位的前车位分界线和内边界线的夹角中线的反方向上设置摄像机,所述的摄像机正对所述的停车位的进出通道,并且设置所述的三角标记位于所述的摄像机的光轴上;所述的摄像机设置唯一的设备编号,所述的摄像机设置无线模块,可通过无线网络连接进行停车位管理的远程服务器,可上传含有车牌号码的车辆图像,并通过所述的设备编号匹配对应的停车位,所述的远程服务器设置车牌识别功能和无人化管理方法,所述的无人化管理方法包括以下步骤:
(1)所述的摄像机在初始化阶段采集停车位图像f
(2)所述的摄像机每隔固定时间T采集停车位图像f
(3)当车辆驶入所述的停车位,所述的远程服务器根据停车位图像f
(4)当车辆停在所述的停车位上,所述的远程服务器保存当前时间t
(5)当车辆驶出所述的停车位后,所述的远程服务器将停车位图像f
所述的摄像机具有补光功能,在光照不足的情况下可以拍摄清晰图像。
所述的摄像机的离地高度设置为1m~1.5m。
所述的摄像机的离所述的停车位内边界线的距离设置为30cm~50cm。
所述的摄像机的光轴与地面的夹角设置为30º~40º。
本发明的有益效果主要表现在:1,实现无人化停车计费管理,避免了人工的繁重劳动;2,采用单目摄像机采集车辆图像,完成车辆停入和驶出停车位的检测,降低了成本。
附图说明
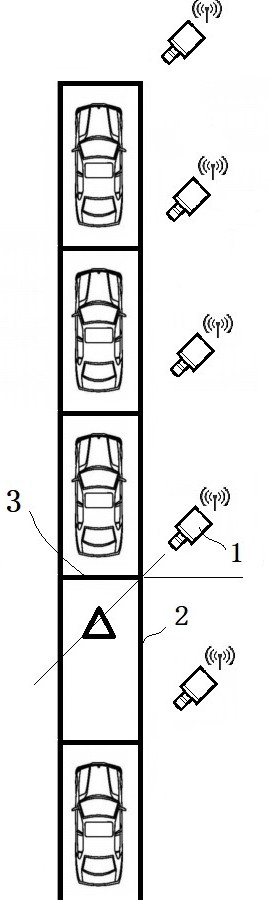
图1是本发明实施例中摄像机的安装示意图;
图2是本发明实施例中无人化管理方法流程图。
具体实施方式
下面结合附图对本发明作进一步描述:
参照图1-2,基于图像分析和记录的路边停车位无人化管理方法,应用于道路两旁的侧进式停车位的无人化停车收费管理,侧进式停车位沿道路方向设置,车辆停入和驶出的时候对道路上的车辆影响较小,但是车辆沿道路方向停放,车牌抓取比较困难,并且车辆停放位置如果与前车距离很近,则车牌被遮挡,更增加了车牌抓取的难度。
所述的停车位的四周设置前车位分界线3、后车位分界线、外边界线和内边界线2,内部设置表示停车方向的三角标记,同时也作为空停车位的标志。所述的停车位的前车位分界线3和内边界线2的夹角中线的反方向上设置摄像机1,所述的摄像机1正对所述的停车位的进出通道,并且设置所述的三角标记位于所述的摄像机1的光轴上。当有车辆驶入所述的停车位时,所述的摄像机1可以拍摄车辆图像,不管是车头还是车尾;当没有车辆驶入所述的停车位时,所述的摄像机1拍摄所述的三角标记。
为了更好的拍摄驶入所述停车位的车辆的车牌图像,所述的摄像机1的离地高度设置为1m~1.5m,离所述的停车位的内边界线2的距离设置为30cm~50cm,所述的摄像机1的光轴与地面的夹角设置为30º~40º。同时,为了实现夜晚环境下的图像采集,所述的摄像机1具有补光功能,在光照不足的情况下可以拍摄清晰图像。
所述的摄像机1设置唯一的设备编号,用于匹配对应的停车位。所述的摄像机1设置无线模块,可通过无线网络连接进行停车位管理的远程服务器,可上传含有车牌号码的车辆图像。所述的无线模块设置为4G/5G模块。
所述的远程服务器设置车牌识别功能和无人化管理方法。所述的车牌识别功能用于提取所述的摄像机1上传的车辆图片中车牌信息,所述的无人化管理方法包括以下步骤:
(1)所述的摄像机1在初始化阶段采集停车位图像f
由于所述的停车位的特点,车辆停在所述的停车位上的时候,车牌经常被前面停放的车辆挡住,不能以车牌号码作为停车持续时间的判断依据,而是以检测到空的停车位的时间为止,作为停车持续时间的判断依据。
(2)所述的摄像机1每隔固定时间T采集停车位图像f
固定时间T可根据实际情况设定,增加固定时间T的时间长度可减少检测运算开销,但是增加了计时误差;相反,缩短固定时间T的时间长度则增加检测运算开销,降低计时误差。
(3)当车辆驶入所述的停车位,所述的远程服务器根据停车位图像f
车辆在驶入所述的停车位过程中,与前面所停车辆存在一定间距,并且所述的摄像机1的安装方式,可以获取含有车辆车牌的停车位图像f
(4)当车辆停在所述的停车位上,所述的远程服务器保存当前时间t
当车辆停在所述的停车位上,车辆遮挡了所述的三角标记,所述的远程服务器确认车辆持续停放,因此仅仅记录时间和图像。
(5)当车辆驶出所述的停车位后,所述的远程服务器将停车位图像f
当车辆驶出所述的停车位后,短时间内,其他车辆无法驶入,因此所述的摄像机1可以拍摄到所述的三角标记,所述的远程服务器以此作为结束停车的触发条件,并进行计费、扣费。
- 基于图像分析和记录的路边停车位无人化管理方法
- 基于移动互联网的无人化停车位管理方法