雷达测试中多源数据时延控制及时钟同步采集方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明属于雷达测试中数据采集方法技术领域,具体涉及雷达测试中多源数据时延控制及时钟同步采集方法。
背景技术
随着网络技术的不断发展和完善,同步技术不断的进步和革新,在业和电子行业对同步精度,同步方式和时延控制有着更高的需求。不同的时间标准和时延造成的时间偏差,不仅可能使数据延迟,严重时甚至将导致数据的反转,不能建立起单个或多个子系统进行时钟校准并且无法实现多个采集设备的工作同步,使数据采集工作缺少便捷与突破。
发明内容
针对上述背景技术所提出的问题,本发明的目的是:旨在提供雷达测试中多源数据时延控制及时钟同步采集方法。
为实现上述技术目的,本发明采用的技术方案如下:
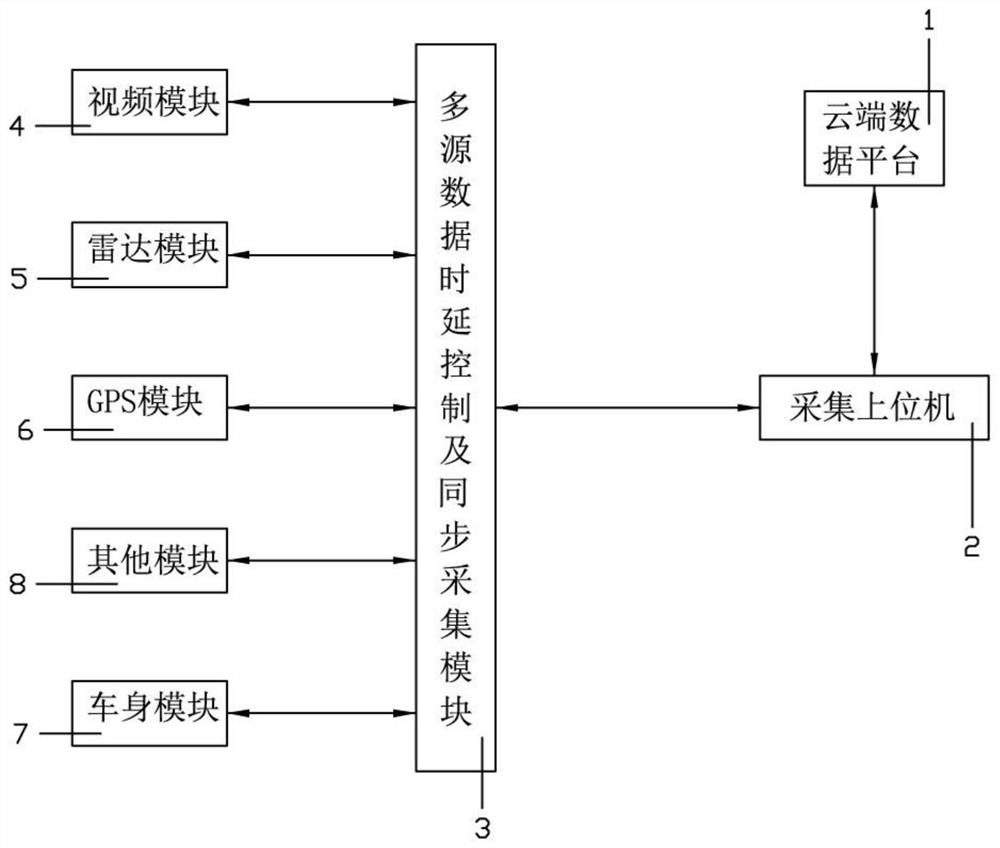
雷达测试中多源数据时延控制模块,包括云端数据平台,所述云端数据平台信号连接有采集上位机,所述采集上位机信号连接有多源数据时延控制模块及同步采集模块,所述多源数据时延控制模块及同步采集模块包括有视频模块、雷达模块、GPS模块和车身模块,所述多源数据时延控制模块及同步采集模块的输入端与视频模块、雷达模块、GPS模块和车身模块信号连接。
进一步限定,所述GPS模块为北斗高精度定位模块。这样的结构设计使定位更加准确。
进一步限定,所述多源数据时延控制模块及同步采集模块信号连接有其他模块,所述其他模块信号连接有其他不同的信息模块。这样的结构设计使收集到的信息更多更全面。
一种基于权利要求1~3任意一项所述的雷达测试中多源数据时钟同步采集方法,其特征在于:包括以下步骤:
S1:启动电源后首先进行系统自检,自检通过后模块接口初始化;
S2:初始化完成后开始接受北斗信息,同时以北斗时间为基准进行对比;
S3:若其他源数据与北斗时间相同则直接设置各模块数据采样周期,下发启动采样指令;若时间不同则启动时间对齐程序使时间对齐后再进行下一步;
S4:数据周期采集后启动子程序:对每笔数据打系统的时间戳,存储时间到fifo,之后去除fifo数据上传到云端,这样采集到的不同源数据时钟同步,且没有时延;
S5:人工中断采集,结束程序。
本发明的有益效果为:在数据采集和测试系统中,实现将雷达测试中采集的雷达数据、视频数据、车身数据和GPS数据等多源数据无延时并且精确同步显示出来,并且通过CAN线和以太网接口都可以提供一个时钟,通过多源数据时延控制模块及同步采集模块的调配和采集上位机对数据的处理,产生启动时间戳信号,每个模块传送正确的时钟信号,产生启动时间戳信号,为了完成时钟校准,需多源数据时延控制模块及同步采集模块配合主时钟和从时钟,不同的信息模块以不同形式分别与交换机连接,建立起单个或多个子系统进行时钟校准并且实现多个采集设备的工作同步,综合控制多个数据时延和同步采集技术将为数据采集工作提供很大的便捷与突破。
附图说明
本发明可以通过附图给出的非限定性实施例进一步说明;
图1为本发明实施例雷达测试中多源数据时延控制模块的结构示意图;
图2为本发明实施例雷达测试中多源数据时钟同步采集方法的流程示意图;
主要元件符号说明如下:
云端数据平台1、采集上位机2、多源数据时延控制模块及同步采集模块3、视频模块4、雷达模块5、GPS模块6、车身模块7、其他模块8。
具体实施方式
为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
如图1-2所示,本发明的雷达测试中多源数据时延控制模块,包括云端数据平台1,云端数据平台1信号连接有采集上位机2,采集上位机2信号连接有多源数据时延控制模块及同步采集模块3,多源数据时延控制模块及同步采集模块3包括有视频模块4、雷达模块5、GPS模块6和车身模块7,多源数据时延控制模块及同步采集模块3的输入端与视频模块4、雷达模块5、GPS模块6和车身模块7信号连接。
本实施例中,视频模块4、雷达模块5、GPS模块6和车身模块7等通过CAN线和以太网接口都可以提供一个时钟,通过多源数据时延控制模块及同步采集模块3的调配和采集上位机对数据的处理,产生启动时间戳信号,为了完成时钟校准,需同步控制模块配合主时钟和从时钟,不同的信息模块以不同形式分别与交换机连接,建立起单个或多个子系统进行时钟校准并且实现多个采集设备的工作同步。
优选GPS模块6为北斗高精度定位模块。这样的结构设计使定位更加准确。
优选多源数据时延控制模块及同步采集模块3信号连接有其他模块8,其他模块8信号连接有其他不同的信息模块。这样的结构设计使收集到的信息更多更全面。
一种基于权利要求1~3任意一项所述的雷达测试中多源数据时钟同步采集方法,其特征在于:包括以下步骤:
S1:启动电源后首先进行系统自检,自检通过后模块接口初始化;
S2:初始化完成后开始接受北斗信息,同时以北斗时间为基准进行对比;
S3:若其他源数据与北斗时间相同则直接设置各模块数据采样周期,下发启动采样指令;若时间不同则启动时间对齐程序使时间对齐后再进行下一步;
S4:数据周期采集后启动子程序:对每笔数据打系统的时间戳,存储时间到fifo,之后去除fifo数据上传到云端,这样采集到的不同源数据时钟同步,且没有时延;
S5:人工中断采集,结束程序。
上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 雷达测试中多源数据时延控制及时钟同步采集方法
- 用于时延测试的分布式机箱板卡间时钟同步系统及方法