一种垃圾处理的压缩型机器人及其控制方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及垃圾处理技术领域,具体为一种垃圾处理的压缩型机器人及其控制方法。
背景技术
随着我国社会经济的快速发展城市化进程的加快以及人民生活水平的迅速提高,城市生产与生活过程中产生的垃圾废物也随之迅速增加,生活垃圾占用土地,污染环境的状况以及对人们健康的影响也越加明显,城市生活垃圾的大量增加,使垃圾处理越来越困难,由此而来的环境污染等问题逐渐引起社会各界的广泛关注;
但是目前市场上现有的垃圾压缩机器人使用时,垃圾在进行压缩后,会固化在压缩机器人内部,容易导致垃圾压缩后难以进行排放,影响压缩垃圾后续处理工序的进行。
发明内容
本发明提供技术方案,可以有效解决上述背景技术中提出现有的垃圾压缩机器人使用时,垃圾在进行压缩后,会固化在压缩机器人内部,容易导致垃圾压缩后难以进行排放,影响压缩垃圾后续处理工序的进行的问题。
为实现上述目的,本发明提供如下技术方案:一种垃圾处理的压缩型机器人,包括基板,所述基板的顶端固定安装有压缩机箱,所述压缩机箱的一端嵌入安装有控制开关;
所述压缩机箱的内壁对应基板位置处安装有便捷排料机构,所述便捷排料机构包括固定架、液压伸缩杆、放置凹槽、推动板、滑槽、滑动板、驱动螺杆、从动齿轮、传动齿链、驱动电机和排料孔;
所述压缩机箱的顶端对应基板位置处固定安装有固定架,所述固定架的顶端连接有液压伸缩杆,所述压缩机箱的顶端内壁开设有放置凹槽,所述液压伸缩杆的底端位于压缩机箱内侧位置处连接有推动板,所述基板的顶端开设有滑槽,所述滑槽的内壁滑动安装有滑动板,所述滑槽的一端内壁对应滑动板位置处对称贯穿安装有驱动螺杆,所述驱动螺杆的一端穿过基板固定连接有从动齿轮,所述从动齿轮的外侧啮合安装有传动齿链,所述基板的顶端对应从动齿轮一侧位置处安装有驱动电机;
所述控制开关的输入端电性连接市电的输出端,所述控制开关的输出端电性连接液压伸缩杆和驱动电机的输入端。
根据上述技术特征,所述驱动螺杆与滑动板之间啮合连接,所述压缩机箱和基板的底端对应滑动板位置处开设有排料孔,所述驱动电机的输出轴与其中一个从动齿轮之间通过齿轮和齿链啮合传动。
根据上述技术特征,所述压缩机箱的顶端安装有抽气除味机构,所述抽气除味机构包括除味仓、进气孔、排气孔、输气管、分隔板、抽气泵、送气管和传导板;
所述压缩机箱的顶端固定安装有除味仓,所述除味仓的一端均匀开设有进气孔,所述除味仓的两端均匀开设有排气孔,所述除味仓的一端内壁对应进气孔外侧位置处连接有输气管,所述除味仓的内壁对应输气管位置处连接有分隔板,所述分隔板的顶端对应输气管位置处安装有抽气泵,所述抽气泵的排气端连接有送气管,所述分隔板的一端和除味仓的内壁均匀交错安装有传导板;
所述控制开关的输出端电性连接抽气泵的输入端。
根据上述技术特征,所述除味仓的内部对应分隔板外侧位置处填充有吸收液,所述传导板的安装的倾斜角度为5度。
根据上述技术特征,所述基板的底端对应排料孔外侧位置处安装有收料打包机构,所述收料打包机构包括固定框、调整滑槽、调整滑动板、收卷辊、打包袋、夹持槽、夹持板和夹持旋钮;
所述基板的底端对应排料孔外侧位置处连接有固定框,所述固定框的底端对称开设有调整滑槽,所述调整滑槽的内侧滑动安装有调整滑动板,所述固定框的底端对应调整滑槽一侧位置处连接有收卷辊,所述收卷辊的外侧收卷有打包袋,所述调整滑动板的底端开设有夹持槽,所述夹持槽的内侧滑动安装有夹持板,所述夹持板的底端对称贯穿安装有夹持旋钮。
根据上述技术特征,所述收卷辊的一端嵌入安装有固定旋钮,所述夹持旋钮的顶端穿过夹持板与调整滑动板之间啮合连接。
根据上述技术特征,所述压缩机箱的一端安装有送料压缩机构,所述送料压缩机构包括固定板、压缩电机、压缩螺杆、压缩板、限位板、进料仓、倾斜导板、送料管和送料蛟龙带;
所述压缩机箱的一端内壁固定安装有固定板,所述固定板的一端连接有压缩电机,所述压缩电机的输出轴固定连接有压缩螺杆,所述压缩机箱的内侧滑动安装有压缩板,所述压缩螺杆的一端穿过压缩板连接有限位板,所述压缩机箱的一端安装有进料仓,所述进料仓的内壁固定连接有倾斜导板,所述压缩机箱的顶端连接有送料管,所述送料管的内壁连接有送料蛟龙带;
所述控制开关的输出端电性连接压缩电机和送料蛟龙带的输入端。
根据上述技术特征,所述压缩螺杆与压缩板之间啮合连接,所述送料蛟龙带的外侧与送料管的内壁接触。
根据上述技术特征,一种垃圾处理的压缩型机器人控制方法,包括如下步骤:
S1、垃圾送料:使用送料压缩机构,将垃圾传输后进行稳定压缩;
S2、便捷排料:随后使用便捷排料机构,对压缩后的垃圾进行排放;
S3、自动打包:通过收料打包机构对排放的压缩垃圾进行自动打包;
S4、抽气除味:使用抽气除味机构,在对垃圾进行压缩时,对附近空气进行除味。
根据上述技术特征,所述S1中,使用送料压缩机构,将垃圾使用蛟龙进行传输,再对垃圾进行压缩。
与现有技术相比,本发明的有益效果:本发明结构科学合理,使用安全方便:
1、通过设置的便捷排料机构,可将滑动板顺着放置滑槽移动,使得排料孔露出,再通过液压伸缩杆伸长,带动推动板下移,能够将压缩垃圾从排料孔排出,便于垃圾压缩后的快速排出,提高了压缩垃圾的排放效率。
2、通过设置的抽气除味机构,可将外界气体传输至除味仓内部,对传输至除味仓内的气体进行异味吸收,进入除味仓内的气体会顺着传导板进行传导,提高除味仓内气体在吸收液内的停留时间,从而增加了垃圾处理时的异味吸收和处理效率。
3、通过设置的收料打包机构,可将打包袋进行固定夹持后,将打包袋打开放置在排料孔下方,能够使用打包袋对排放的压缩垃圾进行快速打包,增加了压缩垃圾打包的效率,也提高了压缩垃圾排放后的集中处理效率。
4、通过设置的送料压缩机构,可通过送料蛟龙带将垃圾传输至压缩机箱内,随后通过压缩电机运行,可带动压缩板稳定移动,对加入的垃圾进行压缩,便于压缩板的稳定移动,提高垃圾处理时的稳定性,也提高了垃圾送料的便捷性。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
在附图中:
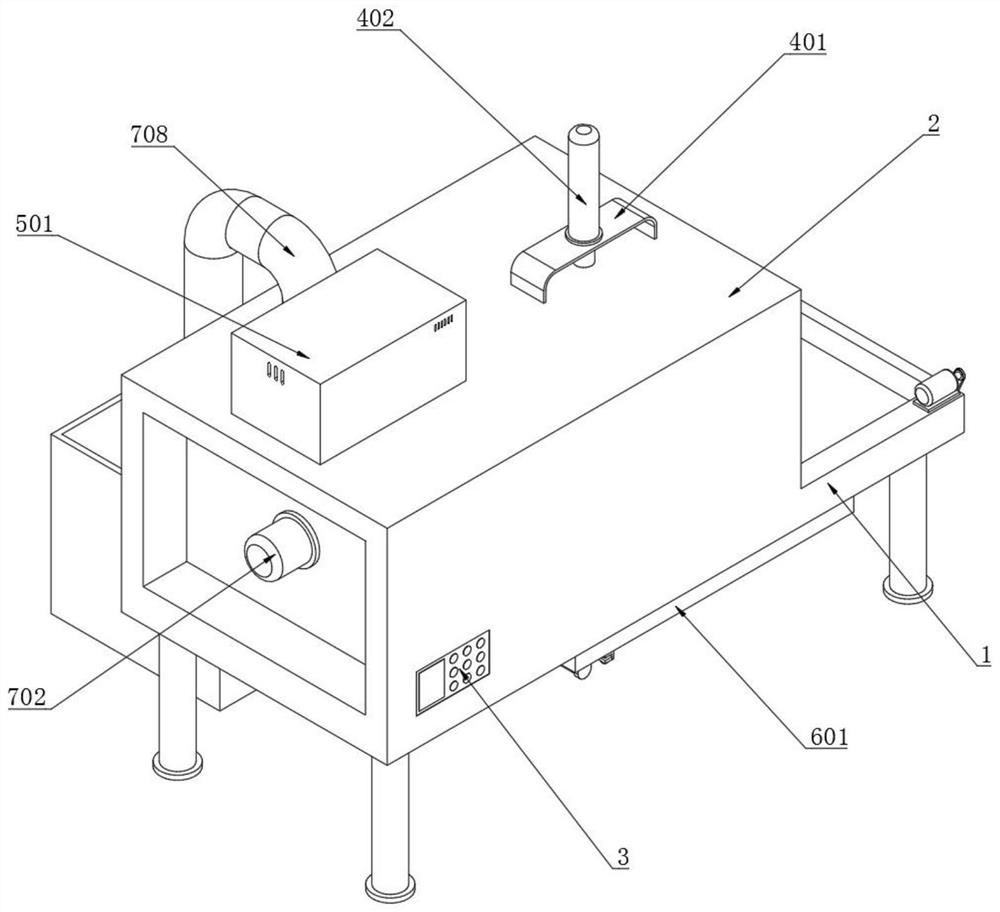
图1是本发明的结构示意图;
图2是本发明便捷排料机构的结构示意图;
图3是本发明从动齿轮和传动齿链的安装结构示意图;
图4是本发明抽气除味机构的结构示意图;
图5是本发明送气管和传导板的安装结构示意图;
图6是本发明收料打包机构的结构示意图;
图7是本发明送料压缩机构的结构示意图;
图8是本发明送料管和送料蛟龙带的安装结构示意图;
图9是本发明控制方法的步骤流程图;
图中标号:1、基板;2、压缩机箱;3、控制开关;
4、便捷排料机构;401、固定架;402、液压伸缩杆;403、放置凹槽;404、推动板;405、滑槽;406、滑动板;407、驱动螺杆;408、从动齿轮;409、传动齿链;410、驱动电机;411、排料孔;
5、抽气除味机构;501、除味仓;502、进气孔;503、排气孔;504、输气管;505、分隔板;506、抽气泵;507、送气管;508、传导板;
6、收料打包机构;601、固定框;602、调整滑槽;603、调整滑动板;604、收卷辊;605、打包袋;606、夹持槽;607、夹持板;608、夹持旋钮;
7、送料压缩机构;701、固定板;702、压缩电机;703、压缩螺杆;704、压缩板;705、限位板;706、进料仓;707、倾斜导板;708、送料管;709、送料蛟龙带。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例:如图1-8所示,本发明提供技术方案,一种垃圾处理的压缩型机器人,包括基板1,基板1的顶端固定安装有压缩机箱2,压缩机箱2的一端嵌入安装有控制开关3;
压缩机箱2的内壁对应基板1位置处安装有便捷排料机构4,便捷排料机构4包括固定架401、液压伸缩杆402、放置凹槽403、推动板404、滑槽405、滑动板406、驱动螺杆407、从动齿轮408、传动齿链409、驱动电机410和排料孔411;
压缩机箱2的顶端对应基板1位置处固定安装有固定架401,固定架401的顶端连接有液压伸缩杆402,压缩机箱2的顶端内壁开设有放置凹槽403,液压伸缩杆402的底端位于压缩机箱2内侧位置处连接有推动板404,基板1的顶端开设有滑槽405,滑槽405的内壁滑动安装有滑动板406,滑槽405的一端内壁对应滑动板406位置处对称贯穿安装有驱动螺杆407,驱动螺杆407的一端穿过基板1固定连接有从动齿轮408,从动齿轮408的外侧啮合安装有传动齿链409,基板1的顶端对应从动齿轮408一侧位置处安装有驱动电机410;
控制开关3的输入端电性连接市电的输出端,控制开关3的输出端电性连接液压伸缩杆402和驱动电机410的输入端,驱动螺杆407与滑动板406之间啮合连接,压缩机箱2和基板1的底端对应滑动板406位置处开设有排料孔411,驱动电机410的输出轴与其中一个从动齿轮408之间通过齿轮和齿链啮合传动,便于驱动电机410运行,带动驱动螺杆407转动。
压缩机箱2的顶端安装有抽气除味机构5,抽气除味机构5包括除味仓501、进气孔502、排气孔503、输气管504、分隔板505、抽气泵506、送气管507和传导板508;
压缩机箱2的顶端固定安装有除味仓501,除味仓501的一端均匀开设有进气孔502,除味仓501的两端均匀开设有排气孔503,除味仓501的一端内壁对应进气孔502外侧位置处连接有输气管504,除味仓501的内壁对应输气管504位置处连接有分隔板505,分隔板505的顶端对应输气管504位置处安装有抽气泵506,抽气泵506的排气端连接有送气管507,分隔板505的一端和除味仓501的内壁均匀交错安装有传导板508;
控制开关3的输出端电性连接抽气泵506的输入端,除味仓501的内部对应分隔板505外侧位置处填充有吸收液,传导板508的安装的倾斜角度为5度,便于通过除味仓501内的吸收液对送入的气体进行吸收除味。
基板1的底端对应排料孔411外侧位置处安装有收料打包机构6,收料打包机构6包括固定框601、调整滑槽602、调整滑动板603、收卷辊604、打包袋605、夹持槽606、夹持板607和夹持旋钮608;
基板1的底端对应排料孔411外侧位置处连接有固定框601,固定框601的底端对称开设有调整滑槽602,调整滑槽602的内侧滑动安装有调整滑动板603,固定框601的底端对应调整滑槽602一侧位置处连接有收卷辊604,收卷辊604的外侧收卷有打包袋605,调整滑动板603的底端开设有夹持槽606,夹持槽606的内侧滑动安装有夹持板607,夹持板607的底端对称贯穿安装有夹持旋钮608,收卷辊604的一端嵌入安装有固定旋钮,夹持旋钮608的顶端穿过夹持板607与调整滑动板603之间啮合连接,便于通过夹持旋钮608对夹持板607和调整滑动板603的相对位置进行调整。
压缩机箱2的一端安装有送料压缩机构7,送料压缩机构7包括固定板701、压缩电机702、压缩螺杆703、压缩板704、限位板705、进料仓706、倾斜导板707、送料管708和送料蛟龙带709;
压缩机箱2的一端内壁固定安装有固定板701,固定板701的一端连接有压缩电机702,压缩电机702的输出轴固定连接有压缩螺杆703,压缩机箱2的内侧滑动安装有压缩板704,压缩螺杆703的一端穿过压缩板704连接有限位板705,压缩机箱2的一端安装有进料仓706,进料仓706的内壁固定连接有倾斜导板707,压缩机箱2的顶端连接有送料管708,送料管708的内壁连接有送料蛟龙带709;
控制开关3的输出端电性连接压缩电机702和送料蛟龙带709的输入端,压缩螺杆703与压缩板704之间啮合连接,送料蛟龙带709的外侧与送料管708的内壁接触,便于通过送料蛟龙带709对垃圾进行传送。
如图9所示,一种垃圾处理的压缩型机器人控制方法,包括如下步骤:
S1、垃圾送料:使用送料压缩机构7,将垃圾传输后进行稳定压缩;
S2、便捷排料:随后使用便捷排料机构4,对压缩后的垃圾进行排放;
S3、自动打包:通过收料打包机构6对排放的压缩垃圾进行自动打包;
S4、抽气除味:使用抽气除味机构5,在对垃圾进行压缩时,对附近空气进行除味。
根据上述技术特征,S1中,使用送料压缩机构7,将垃圾使用蛟龙进行传输,再对垃圾进行压缩。
本发明的工作原理及使用流程:该垃圾处理的压缩型机器人使用时,首先可将需要压缩的垃圾放置在进料仓706内,垃圾会顺着倾斜导板707移动,随后通过控制开关3控制送料蛟龙带709运行,可将进料仓706内的垃圾从送料管708传输至压缩机箱2内,随后通过控制开关3控制压缩电机702运行,带动压缩螺杆703转动,通过压缩螺杆703与压缩板704之间的啮合连接,压缩螺杆703转动会带动压缩板704移动,对加入的垃圾进行压缩,能够对压缩板704进行稳定移动,提高垃圾处理时的稳定性,也提高了垃圾送料的便捷性;
随后通过控制开关3控制驱动电机410运行,可通过从动齿轮408和传动齿链409传动,带动驱动螺杆407转动,通过驱动螺杆407与滑动板406的啮合连接,驱动螺杆407转动时,会带动滑动板406顺着放置凹槽403移动将排料孔411露出,随后通过控制开关3控制液压伸缩杆402伸长,带动推动板404下移,能够将压缩后的垃圾从排料孔411排出,便于垃圾压缩后的快速排出;
在对垃圾进行压缩处理前,可将打包袋605的一端放置在夹持槽606内,旋动夹持旋钮608,带动夹持板607上移,对打包袋605进行夹持,再推动调整滑动板603顺着调整滑槽602移动,能够将打包袋605打开放置在排料孔411下方,能够在压缩垃圾排放时,对排放的压缩垃圾进行快速打包,增加了压缩垃圾打包的效率;
在对垃圾进行压缩处理时,可通过控制开关3控制抽气泵506运行,将外界气体从进气孔502和输气管504抽入,并通过送气管507将提前传输至除味仓501内部,能够通过除味仓501内的吸收液对传输至除味仓501内的气体进行异味吸收,进入除味仓501内的气体会顺着传导板508进行传导,能够提高除味仓501内气体在吸收液内的停留时间,从而增加了垃圾处理时的异味吸收和处理效率。
最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种垃圾处理的压缩型机器人及其控制方法
- 一种环保型垃圾处理用压缩机