手术夹持器
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及医疗器械技术领域,适用于手术用医疗器械及内窥镜夹持固定,尤其涉及手术夹持器。
背景技术
目前的手术过程中,手术器械和内窥镜一般是由一个专门的助手或者用弯臂扶持。人工把持会增加手术操作医生人数,使得本来空间有限的手术操作区域更加拥挤;此外,人手持很难适应时间较长的大型手术,因为时间稍长的话,肌肉疲劳,把持手术器械或内窥镜的肢体会酸胀疲劳,影响稳定,术者就很难看到清晰稳定的图像和术区。再者就是现在大部分手术室的弯臂结构,调节范围受限制,或者就是逐级调节,在灵活度和微调方面不能达到临床应用要求。
发明内容
针对现有技术的上述缺陷,本发明提供的手术夹持器,蛇形臂可任意角度、曲位固定到指定位置,同时底座可以在0-360度环形多角度做固定,调节方便的同时,不受任何外界干涉,完全取代人工扶持。
为了达到上述目的,本发明提供如下技术方案:
手术夹持器包括:底座、蛇形臂、夹持机械手,所述蛇形臂尾部与底座连接,所述蛇形臂端头设有夹持机械手。
所述底座包括:壳体、拉伸机构、驱动装置、锁紧装置和底座旋转固定装置,所述驱动装置与拉伸机构设于壳体内部;所述底座旋转固定装置贯穿于壳体前后两侧,所述底座旋转固定装置用于调节并固定底座角度;所述锁紧装置设置于底座旋转固定装置内,用于将底座固定于手术床上。
所述蛇形臂包括:连接丝以及多个依次首尾连接串联在连接丝上的中空关节,所述连接丝一端连接蛇形臂顶部并贯穿于关节,另一端在底座壳体的内部与拉伸机构连接,并在驱动装置与拉伸机构配合下可拉紧固定或松开关节。
拉伸机构包括:转轴、L形转向臂、楔形块、连接丝安装座,所述L形转向臂通过转轴可旋转的固定于底座内,转向臂的一端设有连接丝安装座,连接丝安装座外部设有滑轮I,在底座内与转轴相对的内壁上设有滑轮II,所述楔形块与驱动装置的输出端连接,所述楔形块在驱动装置的作用下可以在滑轮I和滑轮II之间伸入伸出;
所述夹持机械手用于夹持手术器械。
其中,所述底座旋转固定装置包括:旋转把、限位块、套筒、螺纹筒,所述套筒一端固定设有限位块,所述限位块与底座固定,所述套筒穿过安装孔与底座固定,所述套筒另一端内设有螺纹筒,所述旋转把与螺纹筒螺纹连接,通过旋转把将底座固定或松开。
其中,所述锁紧装置包括螺杆、把手、螺纹筒、安装座、夹爪,所述螺纹筒一端设有安装座,安装座上设有夹爪,所述螺杆通过螺纹筒连接安装座,所述螺杆端部设有把手,通过旋转把控制夹爪夹紧松开。
其中,所述限位块与安装座的接触面上设有限位凸起,所述安装座上设有与限位凸起相匹配的限位槽。
其中,所述蛇形臂头端部设有与夹持机械手快速连接的限位卡块。
其中,所述夹持机械手包括:夹持钳I、夹持钳Ⅱ、夹持臂、锁紧螺母、快速接头,所述夹持钳Ⅱ与夹持臂为一体结构,所述夹持钳I尾部设有凸起,所述夹持钳I与夹持钳II铰接,锁紧螺母与夹持臂上螺纹配合,锁紧螺母旋转移动过程中通过凸起控制夹持钳I张开,所述夹持臂端部设有快速接头。
其中,所述夹持钳I和所述夹持钳Ⅱ的外径随远离夹持臂的距离增大而逐渐增大,通过旋转所述锁紧螺母缩短与夹持钳I和所述夹持钳Ⅱ外径的距离,使夹持钳I与夹持钳II闭合夹紧。
其中,所述连接丝为柔性金属丝。
其中,所述驱动装置为气动,所述驱动装置开关为手控开关或脚控开关。
其中,所述驱动装置设有断能量源保护机构,保证突然失去气源后蛇形臂依然保持原有固定状态。
本发明的有益效果是:本发明提供的手术夹持器,任意角度固定到指定位置,可任意全方位自由度,曲位固定到指定位置,同时底座可以在0-360度环形多角度做固定,调节方便的同时,不受任何外界干涉,完全取代人工扶持,节约人力资源;有效解决现有弯臂结构调节范围受到限制问题,同时为本来空间有限的手术操作区域节约空间资源。
为了能更进一步了解本发明的特征以及技术内容,请参阅以下有关本发明的详细说明与附图,然而附图仅提供参考与说明用,并非用来对本发明加以限制。
附图说明
下面结合附图,通过对本发明的具体实施方式详细描述,将使本发明的技术方案及其它有益效果显而易见。
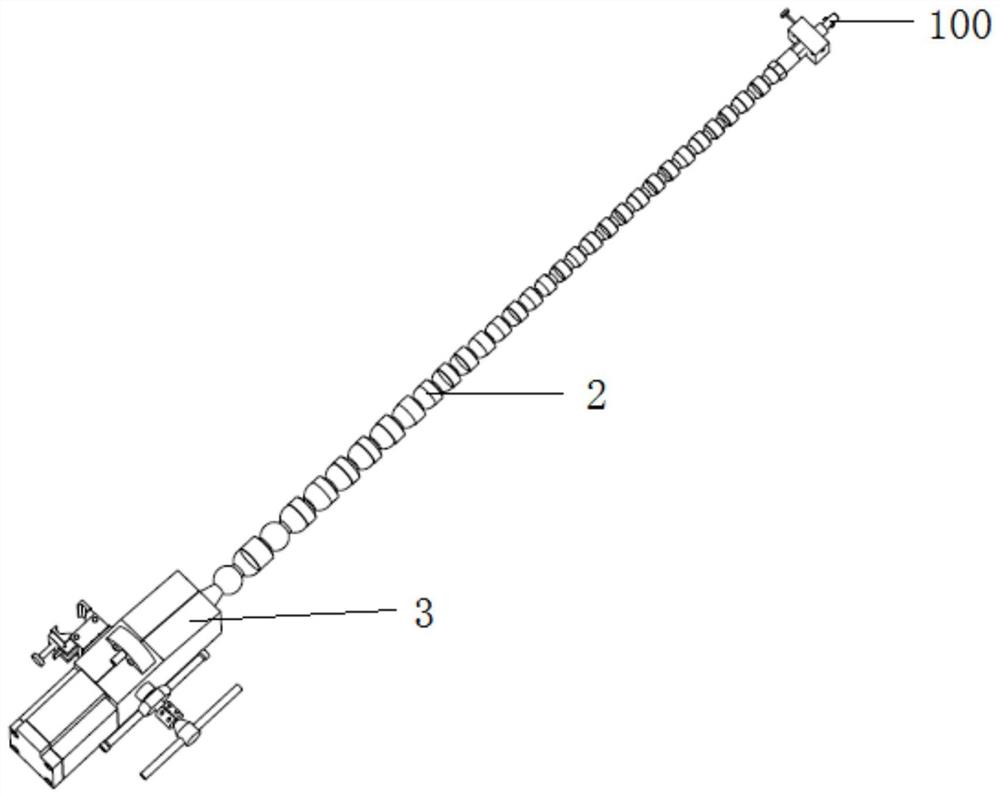
图1是本发明手术夹持器的结构示意图;
图2是本发明手术夹持器的底座内部结构示意图;
图3是本发明手术夹持器的另一种底座内部结构示意图;
图4是本发明手术夹持器的锁紧装置和底座旋转固定装置的结构示意图;
图5是本发明手术夹持器的锁紧装置和底座旋转固定装置爆炸图;
图6是本发明手术夹持器的锁紧装置的部分结构示意图;
图7是本发明手术夹持器的夹持机械手I结构示意图;
图8是本发明手术夹持器的夹持机械手I爆炸图:
图9是本发明手术夹持器的夹持机械手II结构示意图;
图10是本发明手术夹持器的夹持机械手II爆炸图;
图11是本发明手术夹持器的夹持机械手III结构示意图;
图12是本发明手术夹持器的夹持机械手III爆炸图;
图13是本发明手术夹持器的夹持机械手IV结构示意图;
图14是本发明手术夹持器的夹持机械手IV爆炸图;
图15是本发明手术夹持器的按下开关的气动原理图;
图16是本发明手术夹持器的松开开关的气动原理图。
具体实施方式
为更进一步阐述本发明所采取的技术手段及其效果,以下结合本发明的优选实施例及其附图进行详细描述。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例一:
如图1-2所示,本实施例提供的手术夹持器具体包括:底座3、蛇形臂2、夹持机械手1,所述蛇形臂2尾部与底座3连接,所述蛇形臂2端头设有夹持机械手1。
具体地,底座包括:壳体31、拉伸机构、驱动装置32、锁紧装置和底座旋转固定装置,所述驱动装置32与拉伸机构设于壳体内部,驱动装置32与拉伸机构相互配合,控制蛇形臂2拉紧或松弛,达到将手术器械任意角度固定到指定位置的效果。所述底座3旋转固定装置贯穿于壳体前后两侧,所述底座旋转固定装置用于调节并固定底座角度;所述锁紧装置设置于底座旋转固定装置内,用于将底座固定于手术床上。通过底座与蛇形臂的任意角度固定,能够将手术器械可任意全方位自由度,曲位固定到指定位置。
如图2所示,所述蛇形臂2包括:连接丝23以及多个依次首尾连接串联在连接丝上的中空关节,所述连接丝23一端连接蛇形臂顶部并贯穿于关节,另一端在底座壳体的内部与拉伸机构连接,并在驱动装置32与拉伸机构配合下可拉紧固定或松开关节,蛇形臂头端部设有与夹持机械手1快速连接的限位卡块100。
如图1-2所示,拉伸机构包括:转轴34、L形转向臂33、楔形块35、连接丝安装座,所述L形转向臂33通过转轴34可旋转的固定于底座3内,L形转向臂33的一端设有连接丝23安装座,连接丝23安装座外部设有滑轮I36,在底座内3与转轴34相对的内壁上设有滑轮II37,所述楔形块35与驱动装置32的输出端连接,所述楔形块35在驱动装置的作用下可以在滑轮I36和滑轮II37之间伸入伸出。
具体地,驱动装置控制楔形块伸入滑轮I36和滑轮II37之间,使滑轮I36沿楔形块35斜面向上运行,直至斜面顶部的平面处,使L形转向臂33逆时针旋转拉紧连接丝23,使蛇形臂在空间任意位置固定。此时由于滑轮I36处于楔形块35的斜面顶部的平面处,使楔形块35在滑轮I36和滑轮II37之间受力平衡,即使驱动装置突然失去气源,在无外力情况下楔形块也无法自行回到原来的位置,因此在突然失去气源的情况下,连接丝23依然处于拉紧状态,使蛇形臂保持在空间任意位置固定不动。驱动装置控制楔形块退出滑轮I36和滑轮II37之间,使L形转向臂33顺时针旋转松开连接丝23,使蛇形臂2松弛。
如图3所示,进一步地,拉伸机构还可以是另一种形式,具体包括:气缸301、转轮305、拉伸臂303、连接丝23、钢丝309。连接丝23一端固定连接拉伸机构的输出端,另一端与蛇形臂2连接。转轮305通过轴I302固定于壳体内壁,拉伸臂303通过轴II304固定于转轮305,转轮305与气缸301的输出端307之间设有钢丝309,钢丝309一端固定于转轮305,另一端固定于输出端307。具体地,当气缸301的输出端307收缩时,拉动钢丝309进而使滚轮305逆时针转动,通过轴II带动拉伸臂303向下拉紧运动,进而拉紧蛇形臂2。
实施例二:
如图4-6所示,在本实施例中,底座旋转固定装置包括:旋转把41、限位块42、套筒43、螺纹筒53。
具体地,套筒43一端设有限位块42,所述限位块42与底座3固定,所述套筒43穿过安装孔38与底座3固定,所述套筒43另一端内设有螺纹筒53,所述旋转把41与螺纹筒53螺纹连接,通过旋转把41将底座固定或松开。限位块固定于底座上,限位块42上设有限位凸起,安装座54上设有与限位凸起相匹配的限位槽。在该实施例中,底座3通过安装孔38设于限位块42与旋转把41之间,其中旋转把41与螺纹筒53螺纹连接,通过旋转把41将底座3夹紧固定或松开。进一步地,限位块固定于底座上,在限位块42上设有限位凸起,安装座54上设有与限位凸起相匹配的限位槽,通过限位槽与限位凸起的配合可以将底座3旋转任意角度后进行固定,实现了底座3可以在0-360度环形多角度做固定。
实施例三:
如图4-6所示,本实例的锁紧装置包括螺杆51、把手52、螺纹筒53、安装座54、夹爪55。
具体的,螺纹筒一端设有安装座54,安装座54上设有夹爪55,所述螺纹筒53设于套筒43内,所述螺杆51通过螺纹筒53连接安装座54,所述螺杆51端部设有把手52,通过旋转把52控制夹爪55夹紧或松开。
在该实施例中,螺纹筒53一端设有安装座54,安装座54上设有夹爪55,螺纹筒53设于套筒43内,螺杆51端部设有把手52,螺杆51的另一端通过螺纹筒53连接安装座54,在螺纹筒53靠近把手52的一端固定设有限位装置57,限位装置57将螺杆51进行限位,使螺杆51在旋转过程中不会发生位移,通过旋转把52控制夹爪55夹紧或松开。具体的,螺纹杆51连接安装座55上的卡块56,卡块56运动带动夹爪55夹紧或松开,实现夹爪55与手术床的夹紧与取下。
实施例四:
如图7-8所示,本实施例中,所述夹持机械手I包括:夹持钳I11、夹持钳Ⅱ12、夹持臂13、锁紧螺母14、快速接头,所述夹持钳Ⅱ12与夹持臂13为一体结构,所述夹持钳I11尾部设有凸起15,所述夹持钳I11与夹持钳II12铰接,锁紧螺母14与夹持臂13上螺纹配合,锁紧螺母14旋转移动过程中通过凸起15控制夹持钳I11张开;所述夹持钳I11和所述夹持钳Ⅱ12的外径随远离夹持臂的距离增大而逐渐增大,通过旋转所述锁紧螺母14缩短与夹持钳I11和所述夹持钳Ⅱ12外径的距离,使夹持钳I11与夹持钳II12闭合夹紧。所述夹持臂13端部设有快速接头。
在该实施例中,锁紧螺母14与夹持臂13上螺纹配合,锁紧螺母14旋转移动过程中通过凸起15控制夹持钳I11张开;所述夹持钳I11和所述夹持钳Ⅱ12的外径随远离夹持臂的距离增大而逐渐增大,通过旋转所述锁紧螺母14缩短与夹持钳I11和所述夹持钳Ⅱ12外径的距离,使夹持钳I11与夹持钳II12闭合夹紧。进而实现对医疗器械的夹持,所述夹持臂13端部设有快速接头,能够实现与蛇形臂2端头的快速连接。
进一步地,如图9-10所示,夹持机械手还包括其他形状,如夹持机械手II。夹持机械手II包括:本体Ⅰ111、本体Ⅱ112,本体Ⅰ111为外壁带螺纹113的圆管状,本体Ⅰ111的底部圆管为直径可调节的四瓣或多瓣状114。本体Ⅱ112内壁设有与本体Ⅰ111相匹配的螺纹,本体Ⅰ111和本体Ⅱ112通过螺纹连接,螺纹连接的同时将深入本体Ⅰ111内部的医疗镜夹紧。
如图11-12所示,夹持机械手还包括夹持机械手III,夹持机械手III包括夹钳Ⅰ121、夹钳Ⅱ122、夹体Ⅰ124、夹体Ⅱ123、弹簧125,夹体Ⅰ124和夹体Ⅱ123之间设有弹簧,夹体Ⅰ124和夹体Ⅱ123通过销127铰接于夹钳Ⅰ121上,夹体Ⅱ123尾部设有尾凸起130,夹钳Ⅰ121端部设有外螺纹126,与夹钳Ⅱ122的内螺纹相匹配,所述夹钳Ⅱ122的端部向外设有翻边128,所述翻边128与夹体Ⅰ124上的凸起129和夹体Ⅱ123上的尾凸起130相匹配。当夹钳Ⅰ121与夹钳Ⅱ122通过螺纹连接时,夹钳Ⅱ122上的翻边128抵住夹体Ⅰ124上的凸起129和夹体Ⅱ123上的尾凸起130,在翻边128与弹簧125的共同作用下,实现夹体Ⅰ124和夹体Ⅱ123的夹紧与松开。
如图13-14所示,夹持机械手还包括夹持机械手IV,夹持机械手IV包括U形夹131、螺栓132、压片133,U形夹131一端设有螺纹孔134,螺栓132通过螺纹连接于螺纹孔134内,压片133设于螺栓132的端部,通过旋转螺栓132调节压片133与U形夹131另一端的距离,夹持薄片状器械。
进一步地,连接丝23为柔性金属丝,例如:钢丝。
实施例五:
在该实施例中,驱动装置32为气动,所述驱动装置32开关为手控开关或脚控开关,所述手控开关设于夹持机械手1处;所述脚控开关设于地面,通过导管连接驱动装置32,使用更加方便,有效解放医生操作用手,进而提高工作效率。
具体的,所述驱动装置32设有断源保护机构,保证突然失去气源后蛇形臂依然保持原有固定状态。其具体的气动控制如图15所示,外部气源8被气路I81和气路II82分成两路,当按下手控开关或脚控开关时,阀体活塞6下移将气孔露出,将气路II82与大气接通,此时气路I81在换向阀9的作用下将驱动装置32的气缸内活塞7推至底部,此时驱动装置32输出端带动楔形块35退出滑轮I36和滑轮II37之间,使L形转向臂33顺时针旋转松开连接丝23,使蛇形臂2松弛。
如图16所示,当松开手控开关或脚控开关时,阀体活塞6在气路II82的作用下回复至原位将气孔堵住,此时气路I81在换向阀9的作用下将驱动装置32的气缸内活塞7推至顶部,驱动装置32控制楔形块35伸入滑轮I36和滑轮II37之间,使滑轮I36沿楔形块35斜面向上运行,直至斜面顶部的平面处,使L形转向臂33逆时针旋转拉紧连接丝23,使蛇形臂2在空间任意位置固定。此时由于滑轮I36处于楔形块的斜面顶部的平面处,使楔形块35在滑轮I36和滑轮II37之间受力平衡,即使驱动装置突然失去外部气源,在无外力情况下楔形块也无法自行回到原来的位置,因此在突然失去外部气源的情况下,连接丝23依然处于拉紧状态,使蛇形臂2保持在空间任意位置固定不动。
具体实施例:
如图1-16所示,本实施例提供的手术夹持器具体包括:底座、蛇形臂、夹持机械手,所述蛇形臂尾部与底座连接,所述蛇形臂端头设有夹持机械手。
具体地,底座包括:壳体、拉伸机构、驱动装置、锁紧装置和底座旋转固定装置,所述驱动装置与拉伸机构设于壳体内部;驱动装置与拉伸机构相互配合,控制蛇形臂拉紧或松弛,达到将手术器械任意角度固定到指定位置的效果。所述底座旋转固定装置贯穿于壳体前后两侧,所述底座旋转固定装置用于调节并固定底座角度;所述锁紧装置设置于底座旋转固定装置内,用于将底座固定于手术床上;通过底座与蛇形臂的任意角度固定,能够将手术器械可任意全方位自由度,曲位固定到指定位置。
所述蛇形臂包括:连接丝以及多个依次首尾连接串联在连接丝上的中空关节,所述连接丝一端连接蛇形臂顶部并贯穿于关节,另一端在底座壳体的内部与拉伸机构连接,并在驱动装置与拉伸机构配合下可拉紧固定或松开关节;蛇形臂头端部设有与夹持机械手快速连接的限位卡块。
拉伸机构包括:转轴、L形转向臂、楔形块、连接丝安装座,所述L形转向臂通过转轴可旋转的固定于底座内,转向臂的一端设有连接丝安装座,连接丝安装座外部设有滑轮I,在底座内与转轴相对的内壁上设有滑轮II,所述楔形块与驱动装置的输出端连接,所述楔形块在驱动装置的作用下可以在滑轮I和滑轮II之间伸入伸出。
具体地,驱动装置控制楔形块深入滑轮I和滑轮II之间,使滑轮I沿楔形块斜面向上运行,直至斜面顶部的平面处,使L形转向臂逆时针旋转拉紧连接丝,使蛇形臂在空间任意位置固定。此时由于滑轮I处于楔形块的斜面顶部的平面处,使楔形块在滑轮I和滑轮II之间受力平衡,即使驱动装置突然失去气源,在无外力情况下楔形块也无法自行回到原来的位置,因此在突然失去气源的情况下,连接丝依然处于拉紧状态,使蛇形臂保持在空间任意位置固定不动。所述夹持机械手用于夹持手术器械。驱动装置控制楔形块退出滑轮I和滑轮II之间,使L形转向臂顺时针旋转松开连接丝,使蛇形臂松弛。
具体地,所述底座旋转固定装置包括:旋转把、限位块、套筒、螺纹筒,所述套筒一端固定设有限位块,所述限位块与底座固定,所述套筒穿过安装孔与底座固定,所述套筒另一端内设有螺纹筒,所述旋转把与螺纹筒螺纹连接,通过旋转把将底座固定或松开。
具体地,所述锁紧装置包括螺杆、把手、螺纹筒、安装座、夹爪,所述螺纹筒一端设有安装座,安装座上设有夹爪,所述螺杆通过螺纹筒连接安装座,所述螺杆端部设有把手,通过旋转把控制夹爪夹紧松开。螺纹筒一端设有安装座,安装座上设有夹爪,螺纹筒设于套筒内,螺杆通过螺纹筒连接安装座,螺杆端部设有把手,通过旋转把控制夹爪夹紧松开。
具体地,螺纹杆连接安装座上的卡块,卡块运动带动夹爪夹紧或松开,实现夹爪与手术床的夹紧与取下。
进一步,所述夹持机械手包括:夹持钳I、夹持钳Ⅱ、夹持臂、锁紧螺母、快速接头,所述夹持钳Ⅱ与夹持臂为一体结构,所述夹持钳I尾部设有凸起,所述夹持钳I与夹持钳II铰接,锁紧螺母与夹持臂上螺纹配合,锁紧螺母旋转移动过程中通过凸起控制夹持钳I张开,所述夹持臂端部设有快速接头,所述蛇形臂头端部设有与夹持机械手快速连接的限位卡块。所述夹持钳I和所述夹持钳Ⅱ的外径随远离夹持臂的距离增大而逐渐增大,通过旋转所述锁紧螺母缩短与夹持钳I和所述夹持钳Ⅱ外径的距离,使夹持钳I与夹持钳II闭合夹紧,进而实现对医疗器械的夹持。
进一步,所述连接丝为柔性金属丝。
具体地,驱动装置为气动,所述驱动装置开关为手控开关或脚控开关,所述手控开关设于夹持机械手处;所述脚控开关设于地面,通过导管连接驱动装置,使用更加方便,有效解放医生操作用手,进而提高工作效率。
外部气源被气路I和气路II分成两路,当按下手控开关或脚控开关时,阀体活塞下移将气孔露出,将气路II与大气接通,此时气路I在换向阀的作用下将驱动装置的气缸内活塞推至底部,此时驱动装置输出端带动楔形块退出滑轮I和滑轮II之间,使L形转向臂顺时针旋转松开连接丝,使蛇形臂松弛。
当松开手控开关或脚控开关时,阀体活塞在气路I的作用下回复至原位将气孔堵住,此时气路II在换向阀的作用下将驱动装置的气缸内活塞推至顶部,驱动装置控制楔形块伸入滑轮I和滑轮II之间,使滑轮I沿楔形块斜面向上运行,直至斜面顶部的平面处,使L形转向臂逆时针旋转拉紧连接丝,使蛇形臂在空间任意位置固定。此时由于滑轮I处于楔形块的斜面顶部的平面处,使楔形块在滑轮I和滑轮II之间受力平衡,即使驱动装置突然失去外部气源,在无外力情况下楔形块也无法自行回到原来的位置,因此在突然失去外部气源的情况下,连接丝依然处于拉紧状态,使蛇形臂保持在空间任意位置固定不动。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
- 棒材夹持器及利用该棒材夹持器的脊椎用微创手术系统
- 一种用于机器人手术的无创双极电凝夹持器及手术机器人